

MUWEIDU L6020 Motore 24V 200rpm Servo Motore con Encoder 18-bit, RS485/CAN, Coppia nominale 0,58N.m
MUWEIDU L6020 Motore 24V 200rpm Servo Motore con Encoder 18-bit, RS485/CAN, Coppia nominale 0,58N.m
MUWEIDU
Impossibile caricare la disponibilità di ritiro
Panoramica
MUWEIDU Il motore L6020 è un motore DC brushless a bassa velocità e alta precisione motore servo progettato per il controllo di velocità/posizione. Integra un encoder assoluto a singolo giro da 18 bit e supporta la comunicazione CAN o RS485 per sistemi di robotica e automazione che richiedono un funzionamento stabile e fluido. Per la selezione del prodotto o supporto tecnico, contattare [email protected] or visita https://rcdrone.top/.
Caratteristiche principali
- Serie di motori DC brushless ad alta precisione a bassa velocità
- Design a albero cavo
- Operazione stabile e fluida
- Costruzione leggera e ad alta precisione; prestazioni di alto coppia
- Risponde ai requisiti di controllo della posizione a bassa velocità e alta precisione
- Materiali del nucleo del motore: fogli di acciaio al silicio di alta qualità e magneti permanenti ad alte prestazioni resistenti alle alte temperature
- Design a rotore esterno multi-stadio appiattito per una coppia più elevata in applicazioni con spazio limitato
- Struttura brushless combinata con cuscinetti ad alte prestazioni per una rotazione più fluida e una vita utile più lunga
- Resistori in lega ad alta precisione e a bassa deriva termica per un campionamento e controllo della corrente accurati
- Drive a ponte completo trifase N-channel con bassa resistenza interna e alta uscita di corrente
- Supporta il passaggio senza soluzione di continuità tra modalità di controllo della coppia in anello aperto, velocità e posizione
- Controllo principale: MCU a 32 bit con frequenza operativa di 72 MHz
- Voltaggio di ingresso: 12~60 V (drive)
- Calibrazione una tantum, posizione zero mai persa
- Certificato CE (come dichiarato)
Specifiche
| Modello | L6020 |
| Voltaggio nominale | 24V |
| Corrente nominale | 1.4A |
| Potenza di Picco | 12.6W |
| Coppia Nominale | 0.58N.m |
| Coppia di Picco | 1.4N. |
| Velocità Valutata | 200rpm |
| Encoder | 18bit |
| Inerzia del Rotore | 394gcm² |
| Monitoraggio della Temperatura del Motore | SI |
| Modalità di Controllo | Velocità/Posizione |
| Protocollo di Comunicazione | RS485 o CAN |
| Dimensioni Complessive | Φ58mm×21mm |
| Peso | 185g |
Definizione dell'Interfaccia
- ID SWITCH
- CAN/RS485
- B/L: RS485-B o CAN-L
- A/H: RS485-A o CAN-H
- V-: Alimentazione Negativa
- V+: Alimentazione Positiva
- T: Trasmettitore UART
- R: Ricevitore UART
- G: GND Segnale
Scenari di Applicazione
- Robot Umani
- Bracci Robotici
- esoscheletri
- Robot Quadrupedi
- Veicoli AGV
- Robot ARU
- Camera 360°
- Camera Portatile
- LiDAR
- Gimbal
Software PC / Modalità di Controllo (come indicato)
Regolazione dei parametri / test / aggiornamento del firmware basato su PC disponibile.Compatibile con piattaforme di sviluppo open-source tra cui PC, MCU, PLC, computer industriale e Raspberry Pi.
- Modalità di coppia
- Modalità di velocità
- Modalità di controllo multi-giro
- Modalità di posizione + direzione a singolo giro
- Modalità di posizione incrementale
- Modalità di controllo multi-giro (con limite di velocità)
- Modalità di posizione + direzione a singolo giro (con limite di velocità)
- Modalità di posizione incrementale (con limite di velocità)
Manuali / File
Dettagli

Progettato per il controllo del movimento a bassa velocità e alta precisione con un fattore di forma a albero cavo compatto.

La costruzione principale si concentra su una rotazione fluida e un controllo della corrente preciso per prestazioni di posizionamento stabili.
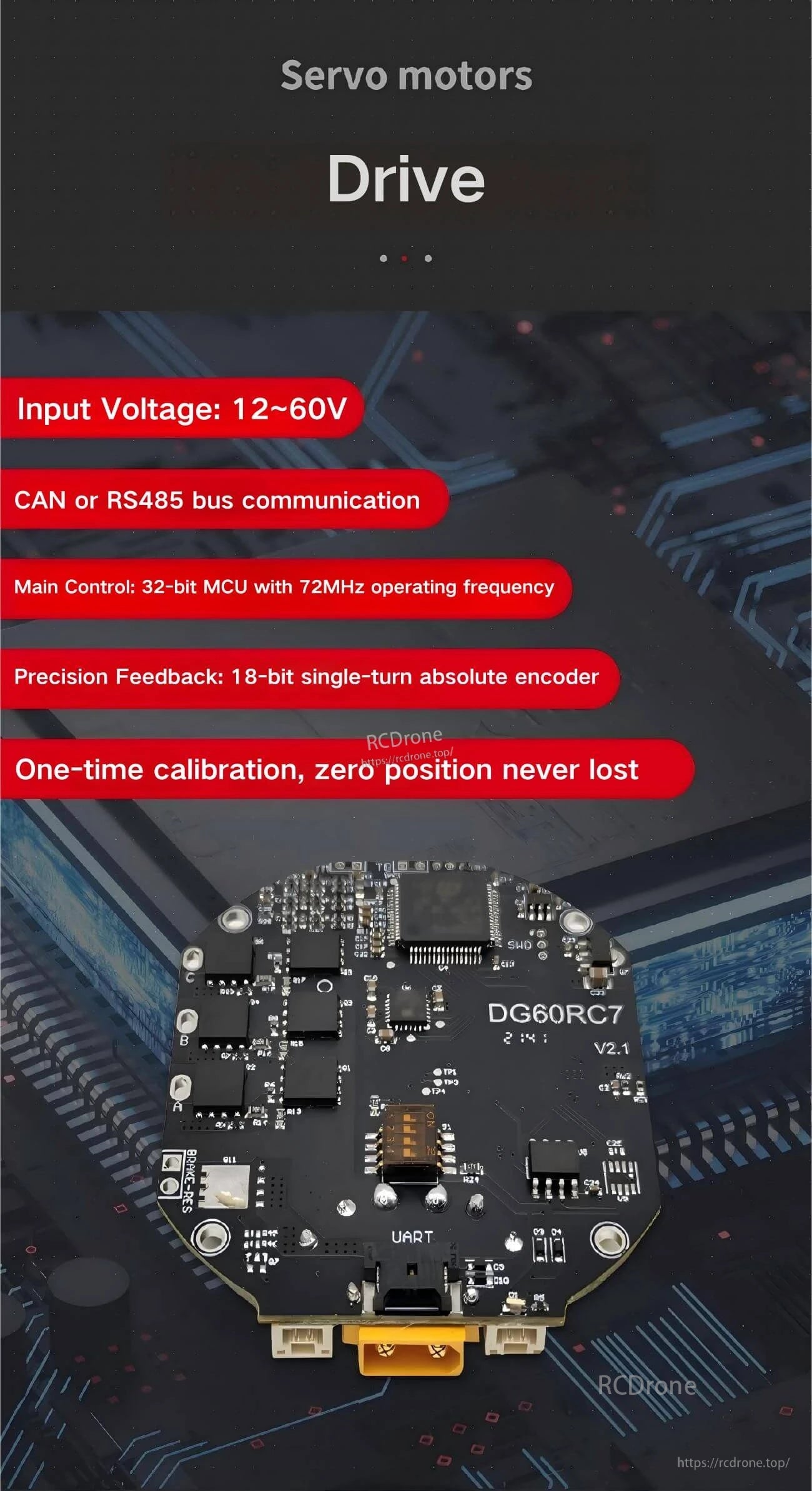
Elettronica di controllo integrata supporta il bus CAN o RS485 con feedback di encoder assoluto a 18 bit.

Etichettatura chiara dell'interfaccia aiuta a cablare correttamente le connessioni di alimentazione, UART e CAN/RS485.
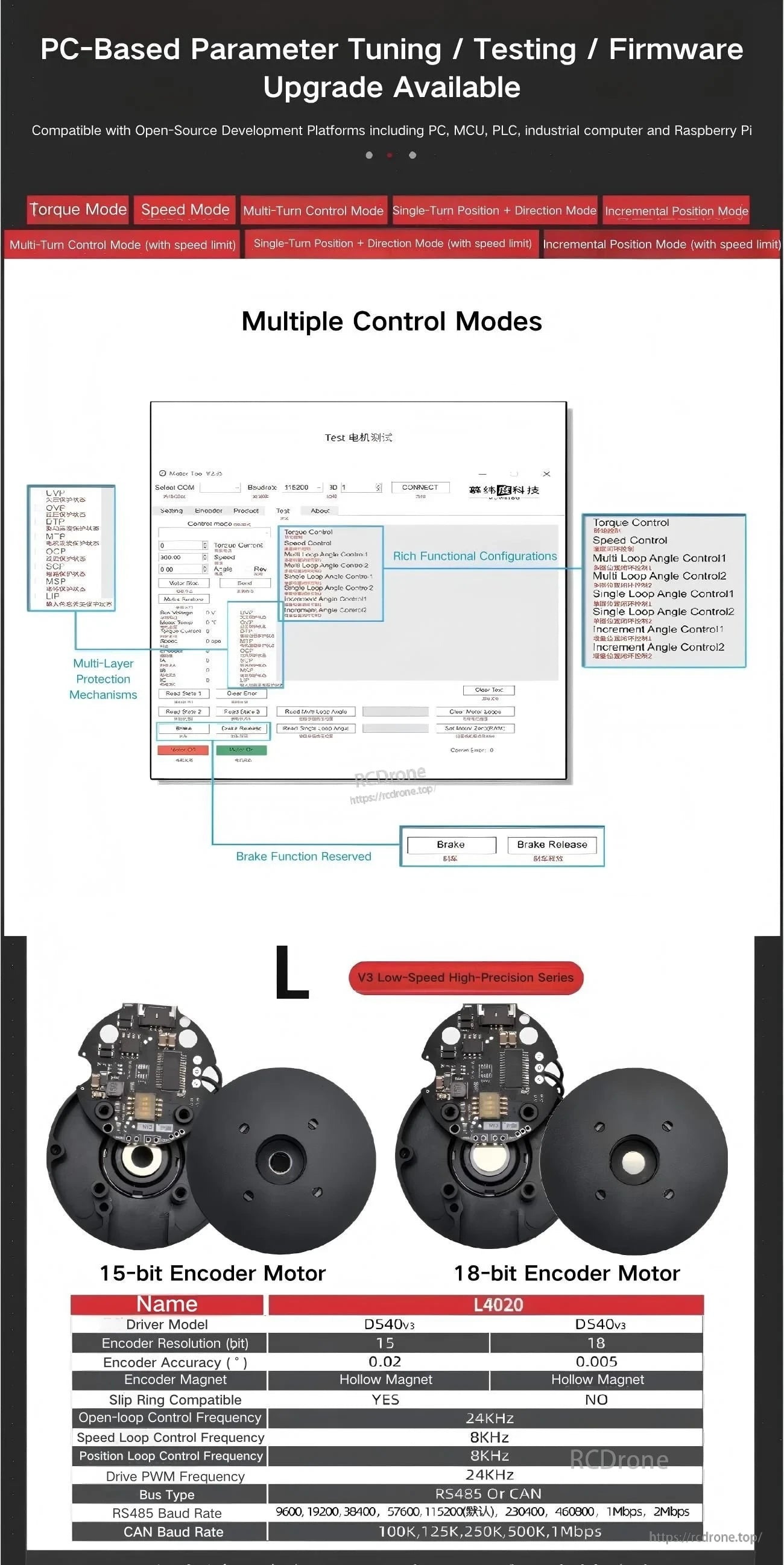
Il software per PC consente la regolazione dei parametri, test e aggiornamenti del firmware attraverso modalità di controllo di coppia, velocità e posizione.
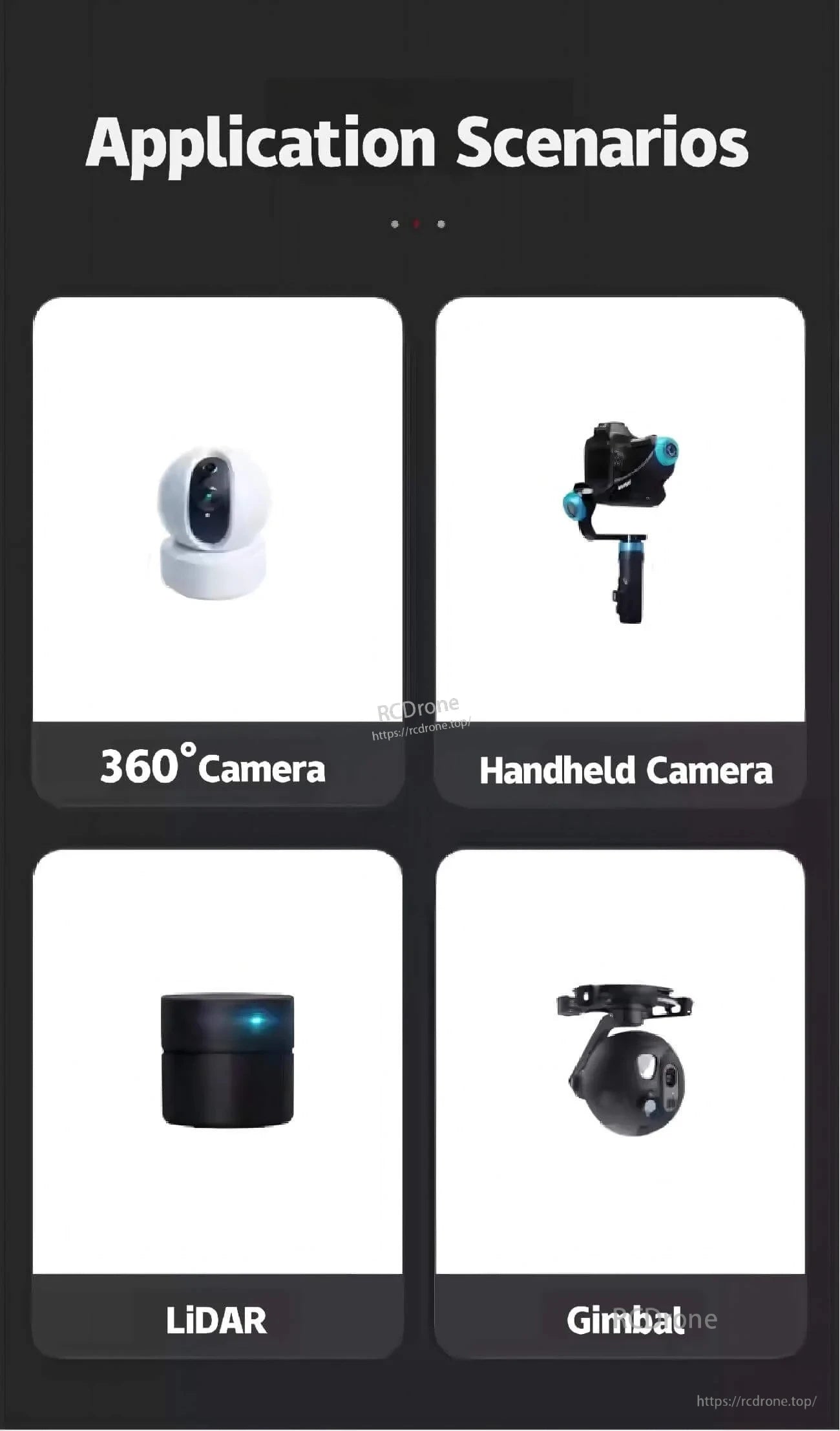
Un adattamento pratico per costruzioni meccatroniche compatte come gimbal, telecamere 360° e moduli LiDAR.
Related Collections

