

MUWEIDU L9030 Motore Brushless DC Servo 24V 160rpm 1N.m RS485/CAN Encoder 15/18bit
MUWEIDU L9030 Motore Brushless DC Servo 24V 160rpm 1N.m RS485/CAN Encoder 15/18bit
MUWEIDU
Impossibile caricare la disponibilità di ritiro
Panoramica
MUWEIDU Il motore L9030 è un servomotore DC brushless a bassa velocità e alta precisione progettato per il controllo della posizione e della velocità in progetti di robotica e automazione. Le caratteristiche della serie includono un design a albero cavo, un funzionamento stabile & fluido e un'etichettatura certificata CE. Per assistenza all'integrazione, accesso alla documentazione o domande pre-vendita, contattare [email protected] or visita https://rcdrone.top/.
Caratteristiche principali
- Posizionamento della serie: “Serie di Motori Brushless DC a Bassa Velocità e Alta Precisione” / “Mini Motori Servo”
- Design a albero cavo
- Funzionamento stabile & fluido
- Certificato CE (testo dell'etichetta)
- Precisione integrata; costruzione leggera; prestazioni elevate di coppia (testo dell'etichetta)
- Progettato secondo standard ultra-alti (testo dell'etichetta)
- Caratteristiche del motore del sistema di azionamento elettrico integrato (testo dell'etichetta)
- Risponde ai requisiti di controllo della posizione a bassa velocità e alta precisione (testo dell'etichetta)
- Materiali principali (testo dell'etichetta): fogli di acciaio al silicio di alta qualità e magneti permanenti ad alte prestazioni resistenti alle alte temperature
- Design a rotore esterno multi-stadio appiattito che offre una coppia più elevata, ideale per applicazioni con spazio limitato (testo dell'etichetta)
- Struttura brushless combinata con cuscinetti ad alte prestazioni per una rotazione più fluida e una vita utile più lunga (etichetta)
- Resistori in lega a bassa deriva termica e alta precisione per un campionamento e controllo della corrente accurati (etichetta)
- Il driver a ponte completo a tre fasi N-channel presenta una bassa resistenza interna e un'alta uscita di corrente (etichetta)
- Supporta il passaggio senza soluzione di continuità tra modalità di controllo della coppia in anello aperto, velocità e posizione (etichetta)
- Disponibile la regolazione / test / aggiornamento del firmware basato su PC (etichetta)
- Compatibile con piattaforme di sviluppo open-source tra cui PC, MCU, PLC, computer industriale e Raspberry Pi (etichetta)
Scenari di Applicazione
- Robot Umani
- Bracci Robotici
- Eseoscheletri
- Robot Quadrupedi
- Veicoli AGV
- Robot ARU
Specifiche
| Modello | L9030 |
| Tensione nominale | 24V |
| Corrente nominale | 1.85A |
| Potenza di picco | 1.8W |
| Coppia nominale | 1N.m |
| Coppia di picco | 2.2N.m |
| Velocità Valutata | 160rpm |
| Encoder | 15bit o 18bit |
| Inerzia del Rotore | 2860gcm^2 |
| Monitoraggio della Temperatura del Motore | SÌ |
| Modalità di Controllo | Velocità/Posizione |
| Protocollo di Comunicazione | RS485 o CAN |
| Dimensioni Complessive | Phi89mm x 37mm |
| Peso | 510g |
Guida / Controllo (Testo Etichetta da Immagini)
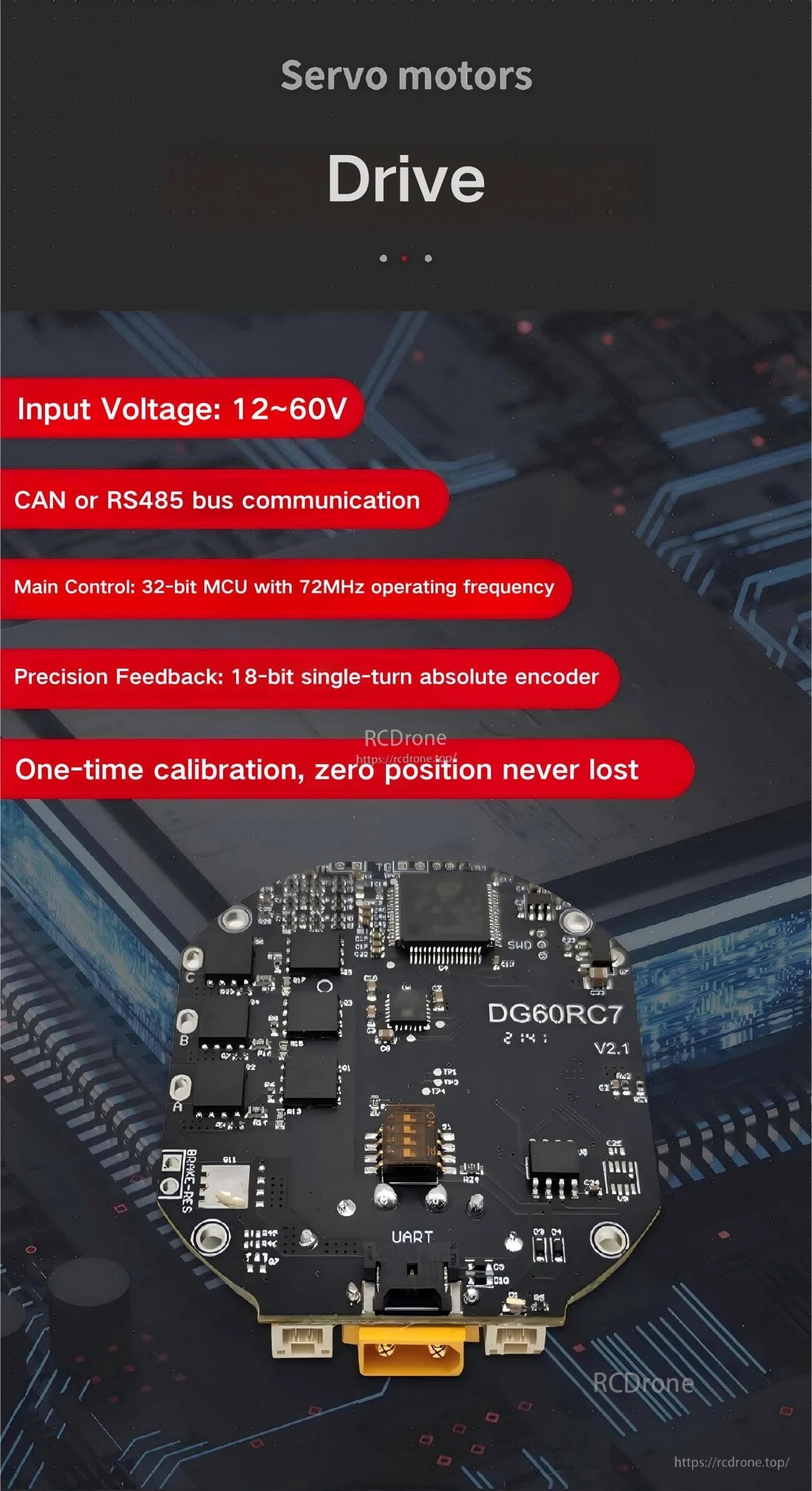
- Tensione di Ingresso: 12~60V
- Comunicazione bus CAN o RS485
- Controllo Principale: MCU a 32 bit con frequenza operativa di 72MHz
- Feedback di Precisione: encoder assoluto a singolo giro da 18 bit
- Calibrazione una tantum, posizione zero mai persa
Definizione dell'interfaccia (Testo dell'etichetta dalle immagini)
| B/L | RS485-B o CAN-L |
| A/H | RS485-A o CAN-H |
| V- | Alimentazione Negativa |
| V- | Alimentazione Negativa |
| V+ | Alimentazione Positiva |
| V+ | Alimentazione Positiva |
| T | Trasmettitore UART |
| R | Ricevitore UART |
| G | GND Segnale |
Altre etichette dell'interfaccia mostrate: ID SWITCH; CAN/RS485.
Modalità di Controllo (Testo Etichetta da Immagini)
- Modalità di Coppia
- Modalità di Velocità
- Modalità di Controllo Multi-Giro
- Modalità di Posizione + Direzione Singolo-Giro
- Modalità di Posizione Incrementale
- Modalità di Controllo Multi-Giro (con limite di velocità)
- Modalità di Posizione + Direzione Singolo-Giro (con limite di velocità)
- Modalità di Posizione Incrementale (con limite di velocità)
Manuali / Documenti
Dettagli

Progettato per robotica compatta e giunti di automazione, la serie L9030 si concentra sul controllo a bassa velocità e alta precisione con un fattore di forma a albero cavo.

Materiali di base premium, una struttura a rotore esterno e cuscinetti lisci supportano un funzionamento stabile, mentre più modalità di controllo coprono coppia, velocità e posizione.
Il supporto per una vasta gamma di tensioni di ingresso e la connettività CAN/RS485 aiutano a semplificare l'integrazione con PC, MCU, PLC o controllori industriali.

Il pinout del connettore e l'etichettatura dell'interruttore ID rendono il cablaggio del bus e l'indirizzamento dei dispositivi più chiari durante l'installazione.
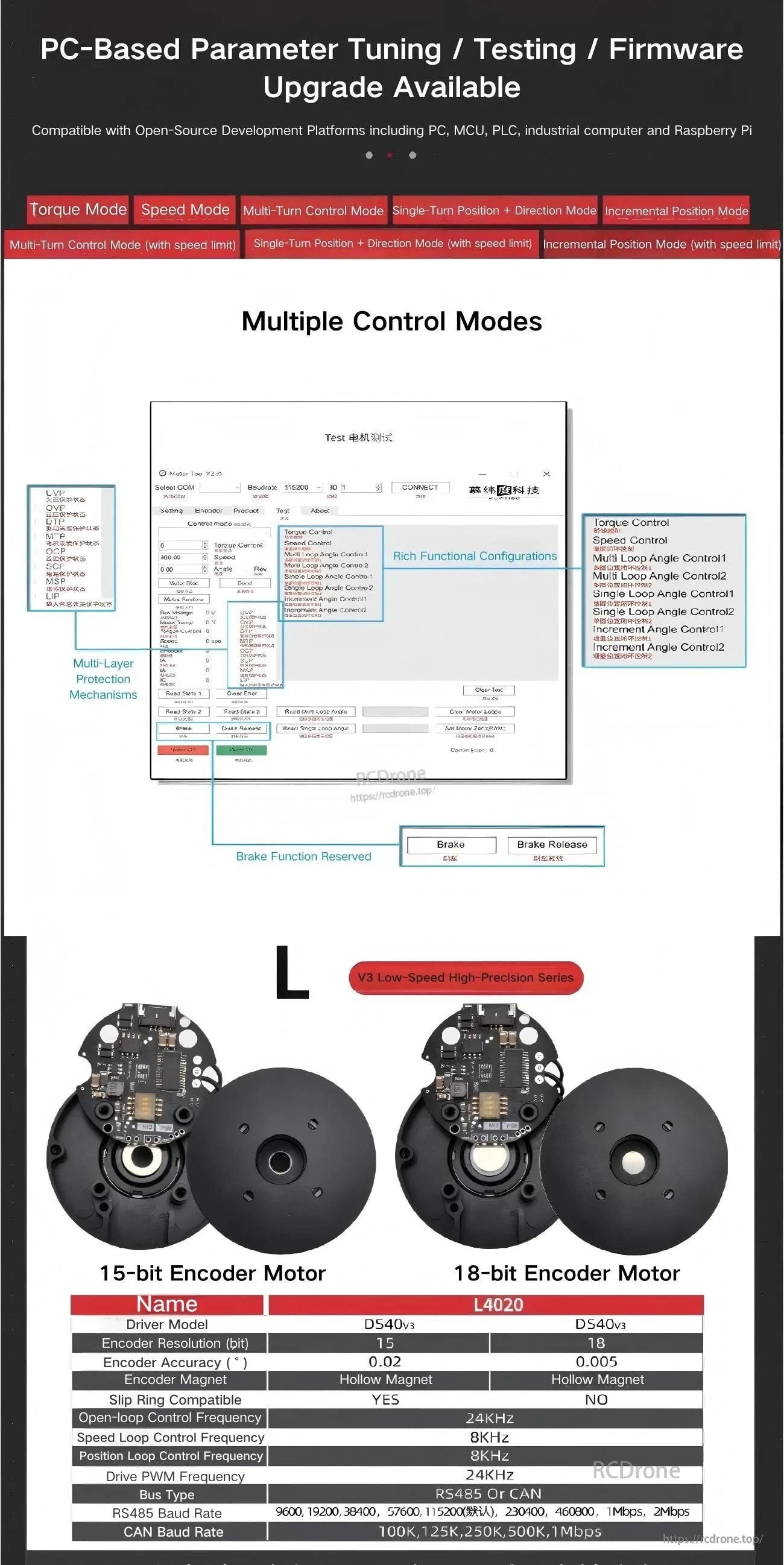
Gli strumenti per PC supportano la regolazione dei parametri, i test e gli aggiornamenti del firmware, con opzioni di encoder disponibili per diverse esigenze di posizionamento.

Related Collections

