

MUWEIDU TS6013-36 24V Motore Compatto Servo con Riduttore 1:36 RS485/CAN Encoder Assoluto 18-bit
MUWEIDU TS6013-36 24V Motore Compatto Servo con Riduttore 1:36 RS485/CAN Encoder Assoluto 18-bit
MUWEIDU
Impossibile caricare la disponibilità di ritiro
Panoramica
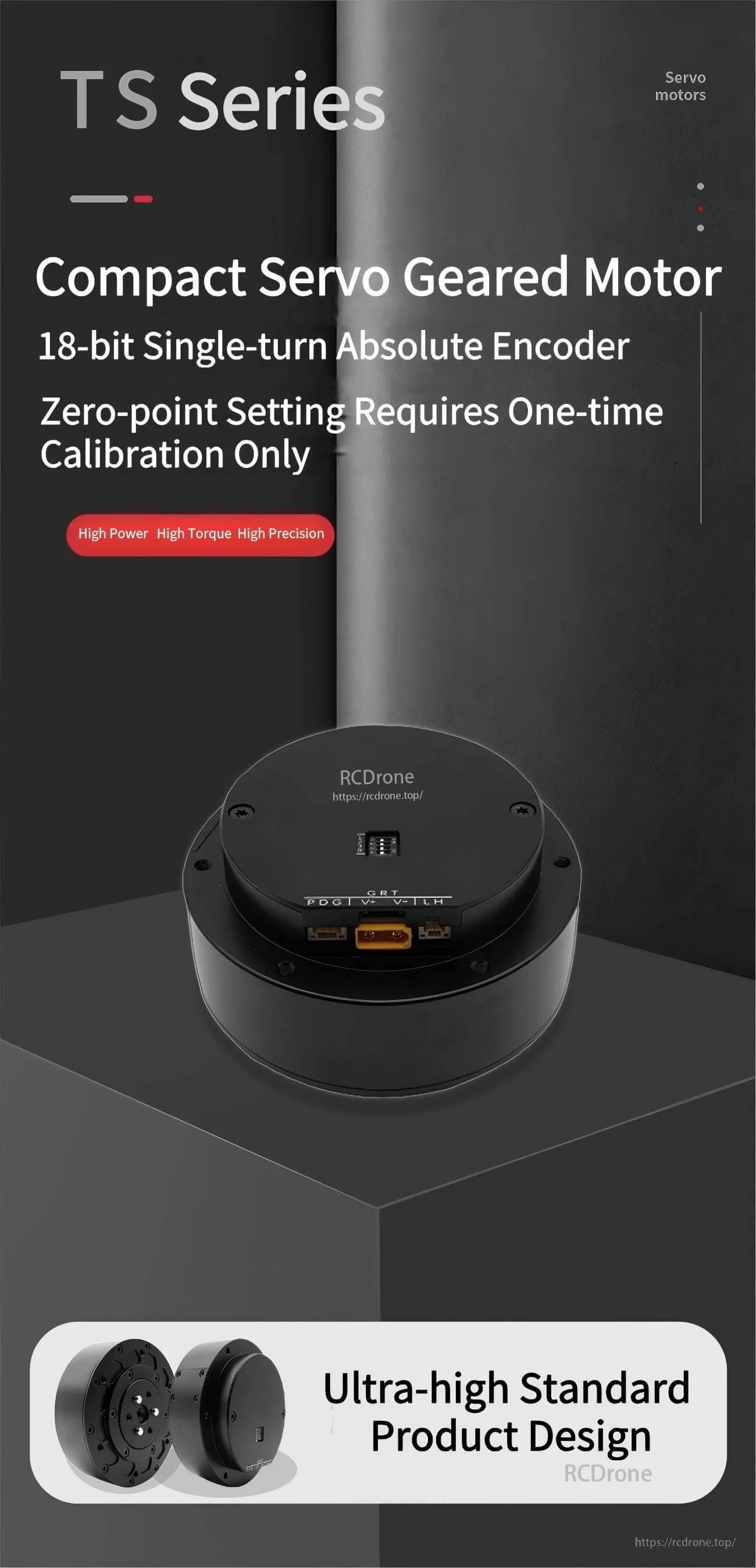
MUWEIDU Il motore TS6013-36 è un motore a servo ridotto compatto (motori a servo della serie TS) progettato come un sistema di azionamento elettrico integrato per robotica e automazione. Presenta un encoder assoluto a singolo giro da 18 bit e supporta la regolazione del punto zero con una sola calibrazione. Le modalità di controllo includono coppia, velocità e posizione, con comunicazione RS485/CAN.
Caratteristiche principali
- Motore a servo ridotto compatto (motori a servo della serie TS)
- Encoder assoluto a singolo giro da 18 bit
- Impostazione del punto zero richiede solo una calibrazione una tantum
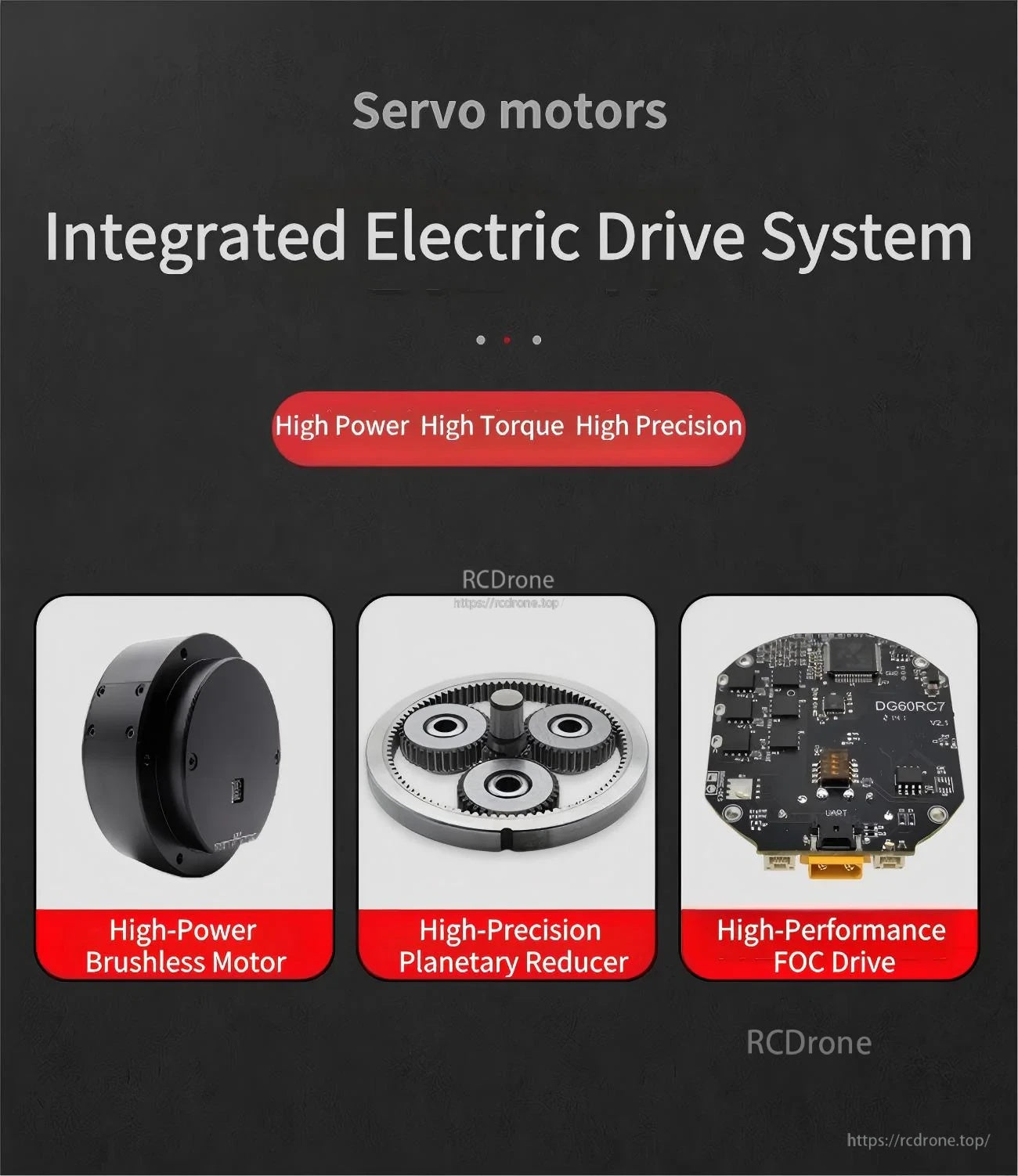
- Architettura del sistema di azionamento elettrico integrato
- Motore brushless ad alta potenza + riduttore planetario ad alta precisione + drive FOC ad alte prestazioni
- Modalità di controllo: Coppia/Velocità/Posizione
- Protocollo di comunicazione: RS485/CAN
Specifiche
| Modello | TS6013-36 |
| Tensione nominale | 24V |
| Corrente nominale | 4.4A |
| Potenza di picco | 160W |
| Coppia nominale | 13N.m |
| Coppia di picco | 25N.m |
| Velocità Nominale | 54rpm |
| Encoder | 18bit + 14bit |
| Inerzia del Rotore | 850gcm^2 |
| Rapporto di Riduzione | 1:36 |
| Modalità di Controllo | Torque/Velocità/Posizione |
| Protocollo di Comunicazione | RS485/CAN |
| Dimensioni Complessive | Φ63mm×54.5mm |
| Dimensioni complessive (con freno) | Φ53mm×59mm |
| Peso | 460g |
| Peso (con freno) | 560g |
Applicazioni
- Robot umanoidi
- Bracci robotici
- Eseoscheletri
- Robot quadrupedi / robot a zampe
- Veicoli AGV
- Robot ARU
- Robot industriali
- Veicoli robotici per ispezione
- Robot medici
Manuali / Download
- MUWEIDU_TS6013-36_Motor.STP
- MUWEIDU_TS6013-36_Diagramma_strutturale_prodotto.pdf
- MUWEIDU_TS6013-36B_Diagramma_strutturale_prodotto.pdf
Per supporto su cablaggio, integrazione o selezione del modello, contattare [email protected] or visita https://rcdrone.top/.
Dettagli
Un motore a servo con riduttore della serie TS integrato combina dimensioni compatte con un encoder assoluto a 18 bit per un posizionamento stabile e ripetibile.
Il motore senza spazzole, il riduttore planetario e l'elettronica di controllo FOC sono integrati in un'unità di azionamento per semplificare il design delle articolazioni del robot.

Related Collections

