

MUWEIDU ZH5030 Motore Elettrico Integrato 16V RS485/CAN Encoder 19-bit per Robotica
MUWEIDU ZH5030 Motore Elettrico Integrato 16V RS485/CAN Encoder 19-bit per Robotica
MUWEIDU
Impossibile caricare la disponibilità di ritiro
Panoramica
MUWEIDU ZH5030 è un sistema di azionamento elettrico integrato progettato per il controllo della posizione a bassa velocità e alta precisione. Supporta modalità di controllo coppia/velocità/posizione e fornisce comunicazione RS485 o CAN per integrazione in robotica e automazione.
Caratteristiche principali
- MCU ad alte prestazioni a 32 bit: Serie MS completamente compatibile con tutti i comandi di controllo della Serie MF.
- Rispetta i requisiti per il controllo della posizione a bassa velocità e alta precisione.
- Fogli di acciaio al silicio di alta qualità e magneti permanenti ad alte prestazioni resistenti ad alte temperature utilizzati come materiali principali del motore.
- Design del rotore esterno a più stadi appiattito che offre una coppia maggiore per applicazioni con spazio limitato.
- Struttura senza spazzole combinata con cuscinetti ad alte prestazioni per una rotazione più fluida e una vita utile più lunga.
- Resistori in lega ad alta precisione e a bassa deriva termica per un campionamento e controllo della corrente accurati.
- Driver completo a ponte completo trifase N-channel con bassa resistenza interna e alta uscita di corrente.
- Supporta il passaggio senza soluzione di continuità tra modalità di controllo della coppia in anello aperto, velocità e posizione.
- Disponibile la regolazione / test / aggiornamento del firmware basato su PC; compatibile con piattaforme di sviluppo open-source tra cui PC, MCU, PLC, computer industriale e Raspberry Pi.
Specifiche tecniche
| Modello | ZH5030 |
| Tensione nominale | 16V |
| Corrente nominale | 1.35A |
| Potenza di picco | 12W |
| Coppia nominale | 0.24 N.m |
| Coppia di picco | 0.53 N.m |
| Velocità Valutata | 440 rpm |
| Encoder | 19 bit |
| Inerzia del Rotore | 202 gcm^2 |
| Monitoraggio della Temperatura del Motore | SI |
| Modalità di Controllo | Momento / Velocità / Posizione |
| Protocollo di Comunicazione | RS485 o CAN |
| Dimensioni Complessive | Ø 49 mm x 28.9 mm |
| Peso | 145 g |
Definizione dell'interfaccia
- Interruttore ID: ID SWITCH
- Connettore di comunicazione: CAN/RS485
| Interfaccia | Nota |
|---|---|
| B/L | RS485-B o CAN-L |
| A/H | RS485-A o CAN-H |
| V- | Alimentazione negativa |
| V- | Alimentazione negativa |
| V+ | Alimentazione positiva |
| V+ | Alimentazione positiva |
| T | Trasmettitore UART |
| R | Ricevitore UART |
| G | GND segnale |
Scenari di applicazione
- Robot umanoidi
- Bracci robotici
- Eseoscheletri
- Robot quadrupedi
- Veicoli AGV
- Robot ARU
- Camera 360°
- Camera portatile
- LiDAR
- Gimbal per pod
Per assistenza all'integrazione e supporto per ordini, contattare [email protected] or visita https://rcdrone.top/ .
Manuali / Documenti
Dettagli

Progettato per movimenti a bassa velocità e alta precisione, il ZH5030 combina un motore senza spazzole e l'elettronica di controllo in un'unità compatta.

Etichettatura chiara dei pin e un interruttore ID a bordo aiutano a semplificare il cablaggio multi-nodo RS485 o CAN durante l'integrazione.
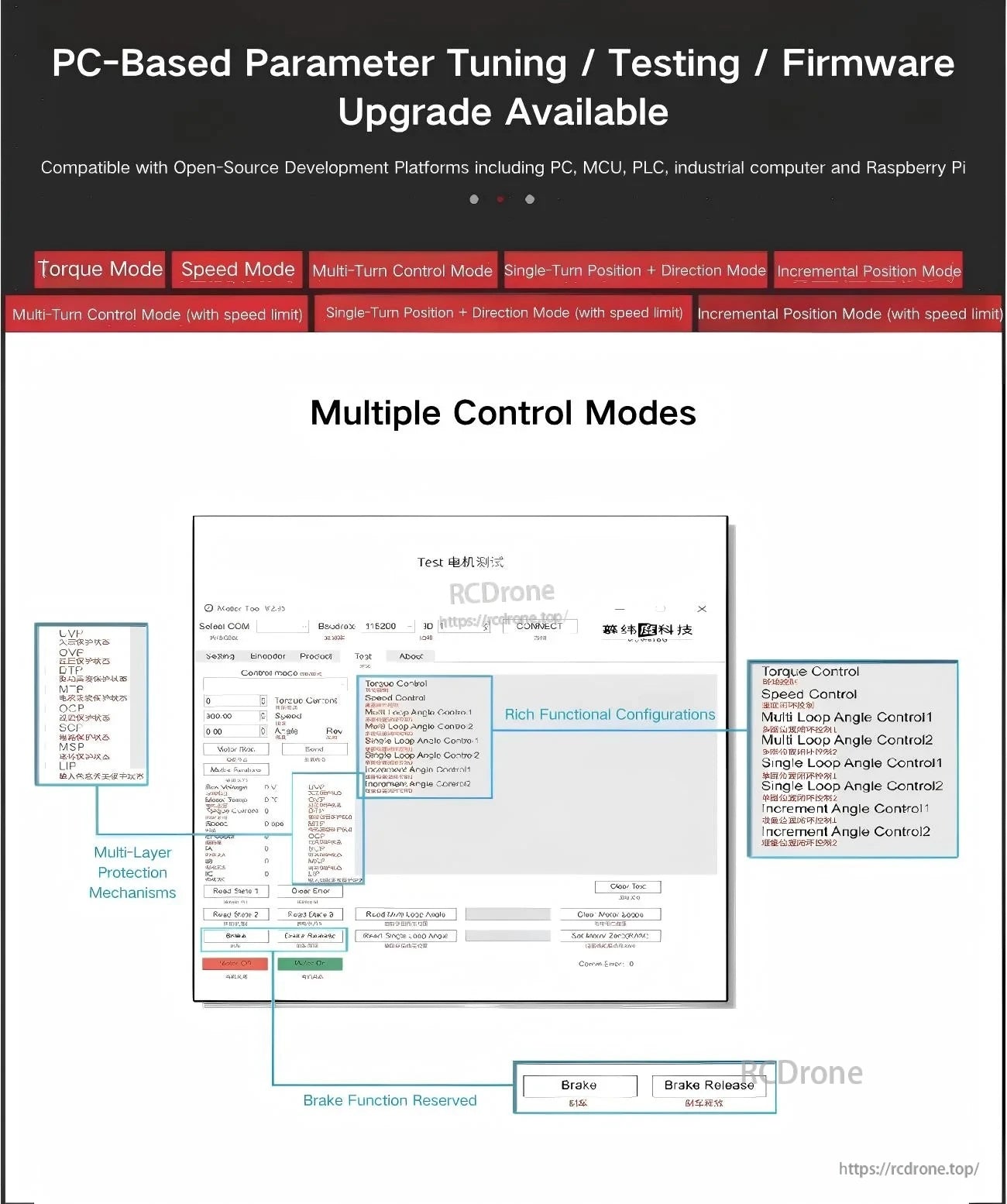
Strumenti basati su PC supportano la regolazione dei parametri, il testing e gli aggiornamenti del firmware, con modalità di controllo della coppia, della velocità e della posizione selezionabili.

Related Collections

