







MyActuator RH-17 Giunto Robotico Armonico Cavo – Coppia di Picco 54N·m, Rapporto di Riduzione 100:1, EtherCAT & CAN BUS, Doppio Encoder ABS-17BIT
MyActuator RH-17 Giunto Robotico Armonico Cavo – Coppia di Picco 54N·m, Rapporto di Riduzione 100:1, EtherCAT & CAN BUS, Doppio Encoder ABS-17BIT
MyActuator
Impossibile caricare la disponibilità di ritiro
Overview
Il Motore Giunto Robotico Hollow Harmonic MyActuator RH-17 è un attuatore ad alte prestazioni progettato per applicazioni robotiche avanzate. Con un rapporto di trasmissione di 100:1, una coppia di picco di 54 N·m e una coppia nominale di 35 N·m, garantisce un funzionamento preciso, stabile e potente. Dotato di comunicazione EtherCAT e CAN BUS, un sistema di encoder duale ABS-17BIT e cuscinetti a rulli incrociati, questo motore offre un'eccezionale precisione di controllo e durata. Il suo design compatto e cavo (Ø80 mm × 90.2 mm) e un peso di 1.11 kg lo rendono ideale per bracci robotici, robot collaborativi e sistemi di automazione che richiedono un'alta densità di coppia e un controllo del movimento preciso.
Caratteristiche Principali
-
Alta Coppia & Potenza: Coppia nominale di 35 N·m e coppia di picco di 54 N·m per applicazioni esigenti.
-
Comunicazione Doppia: Supporta i protocolli EtherCAT e CAN BUS per un'integrazione senza soluzione di continuità e una risposta rapida.
-
Controllo di Precisione: Doppi encoder ABS-17BIT per input e output offrono un posizionamento preciso con <0.01° di ripetibilità.
-
Compatto & Leggero: Design a albero cavo con un peso di soli 1.11 kg, ottimizzato per un'alta densità di coppia.
-
Costruzione Robusta: Dotato di cuscinetti a rulli incrociati per una maggiore capacità di carico e durata.
-
Affidabilità di Grado Industriale: Classe di isolamento F, MCU ad alta velocità e dissipazione del calore ottimizzata per prestazioni stabili a lungo termine.
Parametri del Prodotto
| Parametro | Valore |
|---|---|
| Rapporto di Trasmissione | 100:1 |
| Tensione di Ingresso | 48 V |
| Velocità a Vuoto | 30 RPM |
| Corrente a Vuoto | 0.6 A |
| Velocità Nominale | 25 RPM |
| Momento Torcentale Nominale | 35 N·m |
| Potenza Nominale | 91 W |
| Corrente Nominale | 4.7 A (rms) |
| Momento Torcentale di Picco | 54 N·m |
| Corrente di Picco | 7.4 A (rms) |
| Costante Back-EMF | 19.2 Vdc/Krpm |
| Costante di Coppia del Modulo | 7.4 N·m/A |
| Resistenza della Fase del Motore | 0.70 Ω |
| Induttanza della Fase del Motore | 0.47 mH |
| Coppie di Poli | 10 |
| Gioco | <40 Arcsec |
| Carico Radiale | Statico: 16.3 kN / Dinamico: 10.4 kN |
| Carico Assiale | Statico: 78.2 kN / Dinamico: 20.8 kN |
| Inerzia | N: 0.52 kg·m² / B: 0.56 kg·m² |
| Accuratezza di Ripetizione della Posizione | <0.01° |
| Comunicazione | CAN BUS & EtherCAT |
| Peso | Netto: 1.11 kg / Imballato: 1.28 kg |
| Classe di isolamento | F |
Tipo di encoder
-
Encoder di ingresso: ABS-17BIT
-
Encoder di uscita: ABS-17BIT
-
Fornisce un feedback di movimento preciso per una maggiore accuratezza di controllo.
Installazione & Dimensioni
-
Dimensione: Ø80 mm × 90.2 mm
-
Montaggio: Molti fori passanti e interfacce filettate per un'installazione sicura.
-
Albero cavo: Ottimizzato per il passaggio dei cavi in bracci robotici e sistemi di automazione.
Interfaccia & Cablaggio
-
Porte EtherCAT: terminali IN e OUT per il collegamento in rete.
-
Porte CAN BUS: CAN_H e CAN_L per la comunicazione.
-
Terminali di Alimentazione: connettori XT30 per una fornitura di energia affidabile.
-
Connessioni Ausiliarie: interfacce per batteria di memoria e resistore di scarico per configurazioni di controllo avanzate.
Contenuto della Confezione
-
Attuatore: MyActuator Motore a Giunto Armonico Cavo RH-17 ×1
-
A. Cavo di Alimentazione ×2
-
B. Cavo di Comunicazione CAN BUS ×4
-
C. 120Ω Resistenza del terminale ×1
-
C. Cavo di comunicazione EtherCAT ×2
-
E. Modulo di comunicazione CAN BUS ×1 (Adattatore USB-CAN gratuito incluso per ordine)
Applicazioni
-
Bracci robotici collaborativi
-
Sistemi di automazione industriale
-
Robot umanoidi e quadrupedi
-
Piattaforme di movimento di precisione
-
Giunti robotici autonomi per ricerca e sviluppo
Dettagli

Il motore robotico RH-17 offre doppio encoder, CAN BUS & EtherCAT, rapporto di trasmissione 100:1, 48V, 35 N.m coppia, 91W di potenza. Disponibile con/senza freno. Include disegni e parametri.
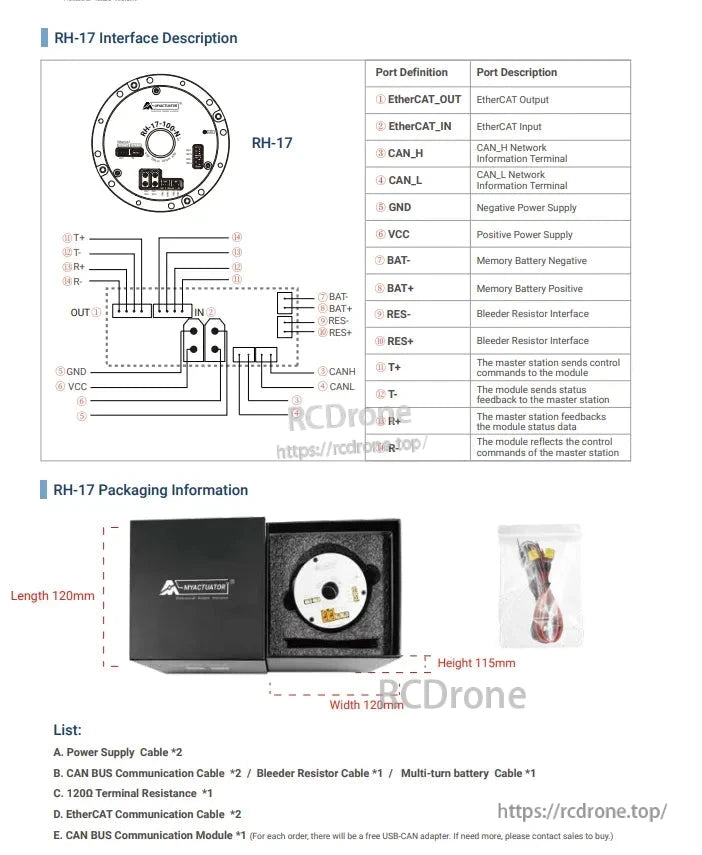
L'interfaccia RH-17 include connessioni EtherCAT, CAN bus, alimentazione e batteria. L'imballaggio contiene cavi, resistori e un modulo. Dimensioni: 120×120×115mm. L'elenco include cavi di alimentazione, CAN, EtherCAT, resistenza e modulo di comunicazione.
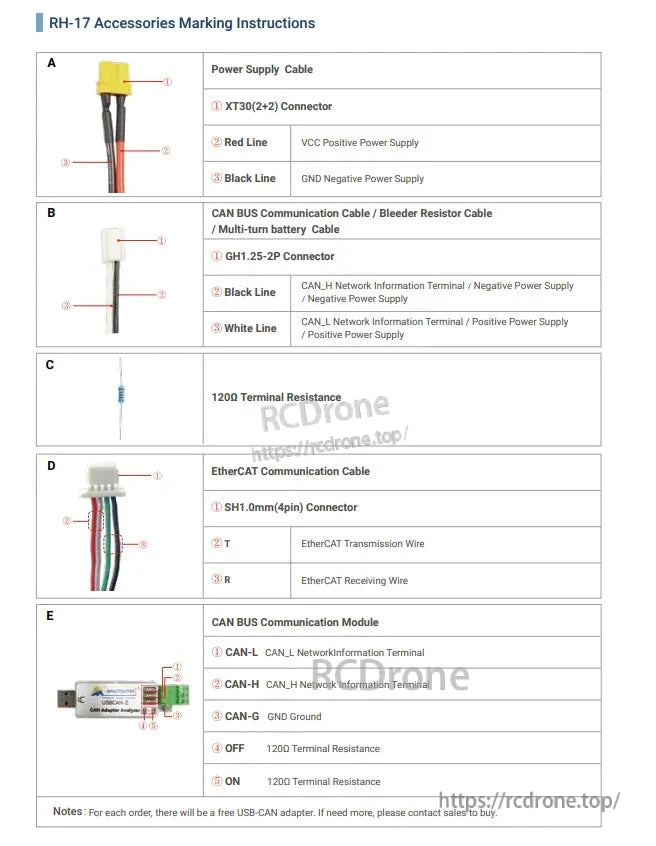
Gli accessori RH-17 includono cavi di alimentazione, CAN BUS, EtherCAT, resistenza da 120Ω e modulo di comunicazione. I dettagli coprono connettori, colori dei fili, funzioni e resistenze terminali per ciascun componente. Adattatore USB-CAN incluso con l'ordine.
Related Collections







