





Attuatore planetario robotico MyActuator RMD-X2-7 7N·m 24V 28:1 doppio encoder CAN EtherCAT motore servo
Attuatore planetario robotico MyActuator RMD-X2-7 7N·m 24V 28:1 doppio encoder CAN EtherCAT motore servo
MyActuator
Impossibile caricare la disponibilità di ritiro
Overview
Il MyActuator RMD-X2-7 attuatore planetario è un servomotore a ingranaggi compatto e ad alta precisione progettato per applicazioni di robotica, automazione e controllo del movimento. Caratterizzato da un rapporto di trasmissione di 28.17:1, encoder doppi (ingresso ABS a 17 bit / uscita a 18 bit), e supporto per comunicazioni sia CAN BUS che EtherCAT, garantisce un'uscita di coppia stabile e un posizionamento preciso. Con una coppia nominale di 2.5 N·m, una coppia di picco di 7 N·m, e una velocità nominale di 142 RPM, questo attuatore offre potenza affidabile in un fattore di forma leggero di 0.26 kg.
Caratteristiche principali
-
Controllo ad alta precisione – Sistema a encoder doppio (ingresso a 17 bit, uscita a 18 bit) con un'accuratezza di controllo <0.01°.
-
Prestazioni elevate – Potenza nominale 37 W, corrente nominale 3 A, efficienza del 63%.
-
Design Compatto – Diametro 44 mm, lunghezza 63.5 mm, peso solo 0.26 kg.
-
Movimento Fluido – Controllo orientato al campo (FOC), bassa retroazione (≤12 arcmin), e costante di coppia di 0.8 N·m/A.
-
Durabilità – Cuscinetti a sfere a gola profonda, grado di isolamento F, e robusto alloggiamento in alluminio.
-
Connettività Flessibile – Compatibile con i protocolli CAN BUS e EtherCAT.
-
Sicurezza & Stabilità – Corrente di picco 8.1 A, efficienza nominale, e resistenza alla coppia di stallo testata con diverse correnti di fase.
Specifiche
| Parametro | Valore |
|---|---|
| Rapporto di Trasmissione | 28.17:1 |
| Voltaggio di ingresso | 24 V |
| Velocità a vuoto | 178 RPM |
| Velocità nominale | 142 RPM |
| Momento torcentale nominale | 2.5 N·m |
| Momento torcentale di picco | 7 N·m |
| Potenza nominale | 37 W |
| Corrente di fase nominale | 3 A (rms) |
| Corrente di fase di picco | 8.1 A (rms) |
| Efficienza | 63% |
| Costante di Back-EMF del motore | 4.3 Vdc/Krpm |
| Costante di coppia | 0.8 N·m/A |
| Resistenza del motore | 0.61 Ω |
| Induttanza del motore | 0.13 mH |
| Coppie di Poli | 13 |
| Momento di Retromarcia | 0.4 N·m |
| Gioco | ≤12 arcmin |
| Tipo di Cuscinetto | Cuscinetti a Sfere a Vite Profonda |
| Carico Assiale | 0.25 KN |
| Carico Radiale | 1 KN |
| Inerzia | 0.17 Kg·cm² |
| Tipo di Encoder | Encoder Doppio ABS-17bit(Ingresso)/18bit(Uscita) |
| Comunicazione | CAN BUS / EtherCAT |
| Peso | 0.26 kg |
| Classe di isolamento | F |
Dati di coppia di stallo
| Coppia (N·m) | Aumento di temperatura (°C) | Tempo di stallo (s) | Corrente di fase (A rms) |
|---|---|---|---|
| 3.75 | 20 | 15 | 4.3 |
| 5.0 | 48 | 10 | 5.7 |
| 6.25 | 31 | 8 | 7.4 |
| 7.5 | 59 | 5 | 8.6 |
Accessori (Inclusi)
-
Alimentatore + Cavo di comunicazione CAN BUS ×1
-
Resistenza terminale 120Ω ×1
-
Cavo di comunicazione EtherCAT ×2
-
Modulo di comunicazione CAN BUS (Adattatore USB-CAN) ×1
Applicazioni
Il MyActuator RMD-X2-7 è ideale per bracci robotici, robot umanoidi, esoscheletri, gimbal e sistemi di automazione industriale dove sono richiesti un controllo preciso della coppia, dimensioni compatte e comunicazione a doppio canale.
Dettagli

Motore servo brushless X2-7, ingresso encoder duale ABS-17BIT/uscita 18BIT, 37W, 2.5N.m, 142rpm, bus CAN, 128, indicatore LED.

Attuatore planetario RMD X2-7 con encoder duale EtherCAT+CAN BUS. Caratteristiche 28.17 rapporto di trasmissione, ingresso 24V, velocità 142RPM, coppia 2.5N.m e potenza 37W. Include dimensioni di installazione e specifiche tecniche.

RMD-X2-P28-7 offre un encoder doppio, ingresso 24V, coppia 2.5N.m, 142 RPM, CAN BUS/EtherCAT e peso di 0.26kg. Include disegno di installazione e specifiche dettagliate come coppia di stallo e dati elettrici.

L'interfaccia X2-7 include VCC, GND, CAN_H, CAN_L, EtherCAT IN/OUT e porte T+/T-, R+/R-. Imballaggio: scatola 65x65x55mm con alimentatore, cavo CAN, resistore da 120Ω, cavo EtherCAT e due moduli CAN. Adattatore USB-CAN gratuito incluso per ordine.
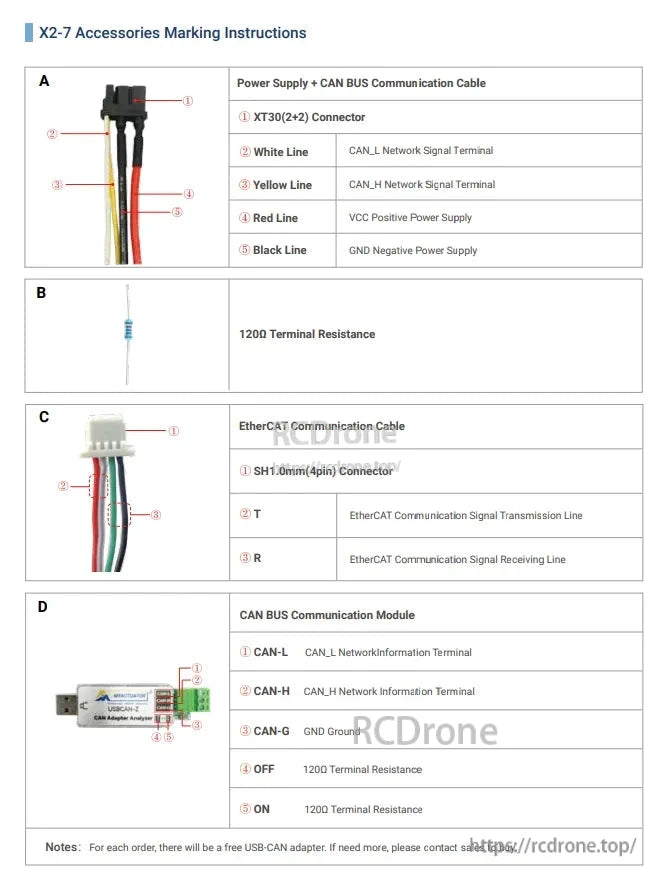
Le istruzioni di marcatura dettagliano alimentazione, cavi CAN BUS, EtherCAT, connettori, resistenza terminale. Include nota per adattatore USB-CAN per ordini.

Il servomotore MYACTUATOR X2-7 eroga 37W di potenza e 2.5N.m di coppia, con encoder doppio, velocità di 1.42rpm e rapporto di trasmissione 1:28.Include un alimentatore, un cavo di comunicazione CAN BUS, una resistenza di terminazione, cavi EtherCAT e un modulo CAN. È incluso un adattatore USB-CAN gratuito. Etichettati VCC, GND, CANH, CANL e segnale I/O per garantire un facile setup. Certificato CE e RoHS, offre prestazioni professionali, affidabili e innovative.
Related Collections





