






Attuatore planetario MyActuator RMD-X4-10 10N·m, doppio encoder, EtherCAT+CAN, trasmissione per giunto robotico
Attuatore planetario MyActuator RMD-X4-10 10N·m, doppio encoder, EtherCAT+CAN, trasmissione per giunto robotico
MyActuator
Impossibile caricare la disponibilità di ritiro
Panoramica
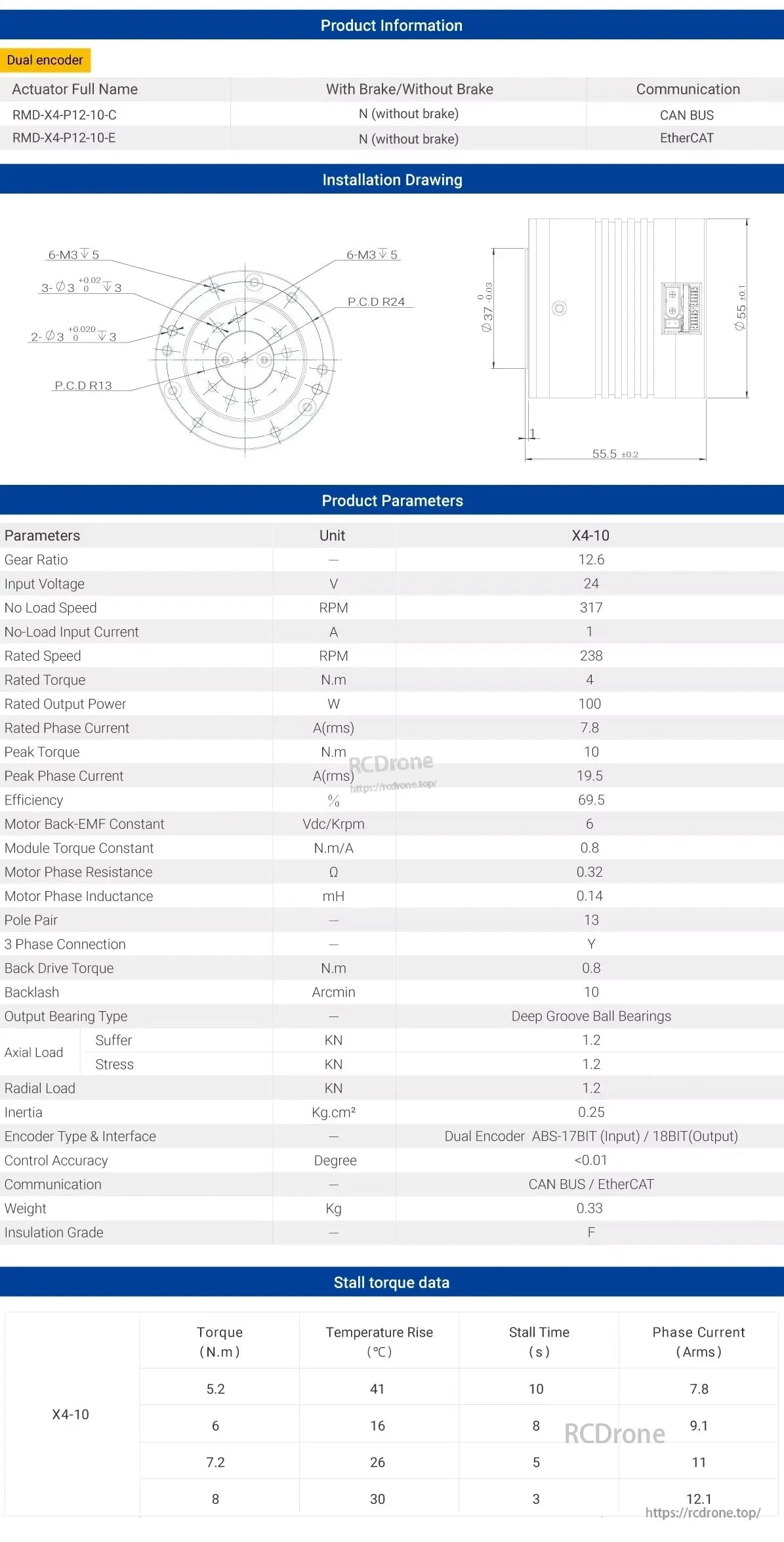
Il MyActuator RMD-X4-10 attuatori planetari è un modulo a motore DC ad alte prestazioni progettato per applicazioni robotiche avanzate. Caratterizzato da un rapporto di riduzione planetario di 12.6:1, una coppia massima di 10N·m e una potenza nominale di 100W, integra un sistema di encoder duale (ingresso 17-bit / uscita 18-bit) che offre un controllo di precisione di 0.01°. La sua grande struttura cava supporta l'integrazione di più sensori, consentendo un hub centrale per il controllo della postura del corpo intero nei robot umanoidi. Con comunicazione dual-protocol EtherCAT e CAN, l'attuatore raggiunge una risposta ultra-rapida di 250μs, rendendolo ideale per scenari ad alta dinamica e alta affidabilità come robot umanoidi, azionamenti per gambe bioniche e automazione industriale.
Caratteristiche principali
-
Encoder duale ad alta precisione: ingresso 17-bit / uscita 18-bit con 0.01° precision
-
Momento di picco 10N·m con rapporto di riduzione planetario 12.6:1
-
Cuscinetto a rulli incrociati: Eccezionale capacità di momento anti-flessione per giunti robotici stabili
-
EtherCAT + Comunicazione Dual CAN Bus: Supporta il collegamento multi-macchina, risposta ultra-veloce di 250μs
-
Struttura cava grande: Consente l'integrazione di sensori, cavi e anelli di contatto per sistemi robotici complessi
-
Alta affidabilità: Progettato per il controllo della camminata umanoide, transizioni fluide per corsa, salto e movimenti complessi
-
Compatto & Leggero: Φ55mm × 55.5mm, peso 0.33kg
Specifiche
| Parametro | Valore |
|---|---|
| Modello | RMD-X4-10 |
| Rapporto di Trasmissione | 12.6:1 |
| Tensione di Ingresso | 24V DC |
| Velocità Nominale | 238 RPM |
| Velocità a Vuoto | 317 RPM |
| Potenza di Uscita Nominale | 100W |
| Momento Torcentale Nominale | 4N·m |
| Momento Torcentale di Picco | 10N·m |
| Corrente Nominale | 7.84A |
| Corrente a vuoto | 1A |
| Tipo di Encoder | Encoder Doppio (ABS-17bit / 18bit) |
| Comunicazione | EtherCAT + CAN Bus |
| Peso | 0.33kg |
| Dimensione | Ø55mm × 55.5mm |
Applicazioni
-
Robot Umani – Attuatori per giunti di braccia, gambe e torso
-
Attuatori per Gambe Bioniche – Alta coppia con design anti-flessione per andature di corsa e salto
-
Robot Collaborativi – Controllo del movimento fluido per automazione industriale
-
esoscheletri – Attuatori leggeri e ad alta dinamica per dispositivi di assistenza umana
-
Linee di Produzione Flessibili – Sincronizzazione multi-assiale tramite comunicazione ad alta velocità EtherCAT
Imballaggio & Accessori
-
Alimentatore + Cavo di Comunicazione CAN Bus ×1
-
Resistenza Terminale 120Ω ×1
Cavo di comunicazione EtherCAT ×2
-
Modulo di comunicazione CAN Bus ×1 (adattatore USB-CAN incluso per ordine)
Dimensioni imballaggio: 100mm × 100mm × 70mm
Dettagli

RMD-X4-PT2.5-10-C azionamento del giunto del robot con encoder duale, ingresso a 24V, rapporto di trasmissione 12.6, coppia di 4N·m e uscita di 100W. Caratteristiche interfaccia CAN BUS/EtherCAT, velocità a vuoto di 317RPM e peso di 0.28kg. Include dimensioni di installazione e specifiche tecniche.

Attuatore planetario con coppia di picco di 10N.m, rapporto di trasmissione 12.6:1, peso di 0.33kg. Dimensioni: Ø55mm×55.5mm. Caratteristiche comunicazione EtherCAT/CANBUS, encoder duale, MCU ad alta velocità, chip CAN e cuscinetti a sfera a gola profonda.

Encoder duale ABS-17BIT Ingresso / 18BIT Uscita, X4-10, SN:40225621, MYACTUATOR

L'attuatore planetario RMD-X4-10 di MYACTUATOR offre 100W di potenza, coppia di 46Nm, encoder duale, velocità di 238rpm. Viene fornito con cavo di alimentazione + CAN BUS, resistore da 120Ω, cavo EtherCAT, modulo CAN BUS e adattatore USB-CAN gratuito.
L'RMD-X4-10 Attuatore Planetario Robotico ha un encoder duale, 12.6 rapporto di trasmissione, ingresso 24V, uscita 100W, e CAN BUS/EtherCAT. Fornisce una coppia di 4N.m, una velocità di 238 RPM, pesa 0.33kg e utilizza cuscinetti a sfera a gola profonda per alta efficienza.

L'interfaccia X4-10 include porte di alimentazione, CAN e EtherCAT. Il pacchetto contiene alimentatore, cavi, resistori e modulo. Dimensioni: 100x100x70mm. Include adattatore USB-CAN con ogni ordine.

Gli accessori X4-10 includono alimentatore, cavi CAN BUS e EtherCAT, resistenza terminale e un modulo CAN BUS. I dettagli coprono connettori, funzioni dei cavi, linee di segnale e note sull'adattatore USB-CAN.
Related Collections






