





MyActuator RMD-X4-36 Attuatore planetario 34N·m Motore DC brushless con doppio encoder, EtherCAT e CAN Bus, rapporto di trasmissione 36:1
MyActuator RMD-X4-36 Attuatore planetario 34N·m Motore DC brushless con doppio encoder, EtherCAT e CAN Bus, rapporto di trasmissione 36:1
MyActuator
Impossibile caricare la disponibilità di ritiro
Panoramica
Il MyActuator RMD-X4-36 Attuatore Planetario Motore DC Senza Spazzole è un attuatore per giunti ad alte prestazioni progettato per sistemi di robotica e automazione che richiedono un controllo preciso del movimento, un'alta coppia e un'integrazione compatta. Con una coppia di picco di 34N·m, un rapporto di trasmissione di 36:1 e una struttura a cuscinetto a rulli incrociati, offre un'eccellente capacità anti-flessione e durata. Dotato di protocolli di comunicazione duali EtherCAT + CAN e di una risposta ultra-rapida di 250μs, questo attuatore è ideale per robot umanoidi, bracci robotici, piattaforme mobili e altre applicazioni robotiche avanzate. Il suo design a doppio encoder (ingresso ABS a 17 bit / uscita a 18 bit) garantisce un'accuratezza di posizionamento ultra-elevata, mentre le dimensioni compatte (55mm × 61mm, 0.36kg) consentono un'integrazione leggera ed efficiente.
Caratteristiche Chiave
-
Encoder Doppio ad Alta Precisione: 17-bit (ingresso) + 18-bit (uscita) per un'accuratezza di 0.01°.
-
Protocolli EtherCAT + CAN Bus: Comunicazione flessibile con risposta ultra-rapida di 250μs.
-
Cuscinetti a Rulli Incrociati: Eccellente prestazione anti-flessione e lunga durata.
-
Alta Densità di Potenza: Compatto con diametro di 55mm, lunghezza di 61mm e peso di soli 0.36kg.
-
Momento Torcentale di Picco 34N·m e Momento Torcentale Nominale 11.5N·m garantiscono un'uscita di movimento stabile e potente.
-
Alta Efficienza: Potenza nominale di 100W con tecnologia FOC (Controllo Orientato al Campo) fluida.
-
Applicazione Versatile: Progettato per robot umanoidi, esoscheletri, manipolatori e sistemi di automazione.
Specifiche
| Parametro | Valore |
|---|---|
| Modello | RMD-X4-P36-36-C |
| Tensione di ingresso | 24V |
| Rapporto di trasmissione | 36:1 |
| Velocità a vuoto | 111 RPM |
| Corrente a vuoto | 0.9 A |
| Velocità nominale | 83 RPM |
| Momento torcentale nominale | 11.5 N·m |
| Potenza di uscita nominale | 100 W |
| Momento torcentale di picco | 34 N·m |
| Corrente di fase di picco | 21.5 A (rms) |
| Coppie di Poli | 13 |
| Tipo di Encoder | Encoder Doppio ABS 17-bit (Ingresso) / 18-bit (Uscita) |
| Protocolli di Comunicazione | EtherCAT / CAN Bus |
| Dimensione | Ø55mm × 61mm |
| Peso | 0.36 kg |
Contenuto della confezione
-
1 × Motore Attuatore Planetario RMD-X4-36
-
1 × Alimentatore + Cavo di Comunicazione CAN Bus
-
1 × Resistenza Terminale da 120Ω
-
2 × Cavi di Comunicazione EtherCAT
-
1 × Modulo di Comunicazione CAN Bus (adattatore USB-CAN)
Applicazioni
-
Robot umanoidi e bionici
-
Bracci robotici collaborativi
-
Eseoscheletri e robot di riabilitazione
-
Robot di servizio e piattaforme mobili
-
Sistemi di automazione di precisione che richiedono attuatori compatti ad alta coppia
Dettagli

Attuatore planetario con 34N.m coppia di picco, rapporto di trasmissione 36:1, 0.36 kg di peso, dimensioni Ø55mm×61mm. Caratteristiche comunicazione EtherCAT/CANBUS, doppio encoder, MCU ad alta velocità, chip CAN e cuscinetti a rulli incrociati.

Motore RMD-X4-P36-36C: 24V, coppia di 10,5N.m, 83RPM, doppio encoder, EtherCAT+CAN BUS, rapporto di trasmissione 36, 0,36kg, encoder ABS-17BIT/18BIT, dimensioni dettagliate incluse.

Motore X4-36, 100W, 12N.m, doppio encoder, ingresso 17BIT, uscita 18BIT, 63rpm, rapporto di trasmissione 1:36, interfaccia CAN bus, indicatore LED.

Motore MYACTUATOR X4-36, 100W, 12N.m, doppio encoder, 83rpm, rapporto 1:36. Include alimentatore, cavo CAN BUS, resistore da 120Ω, cavi EtherCAT e modulo CAN BUS con adattatore USB-CAN gratuito.
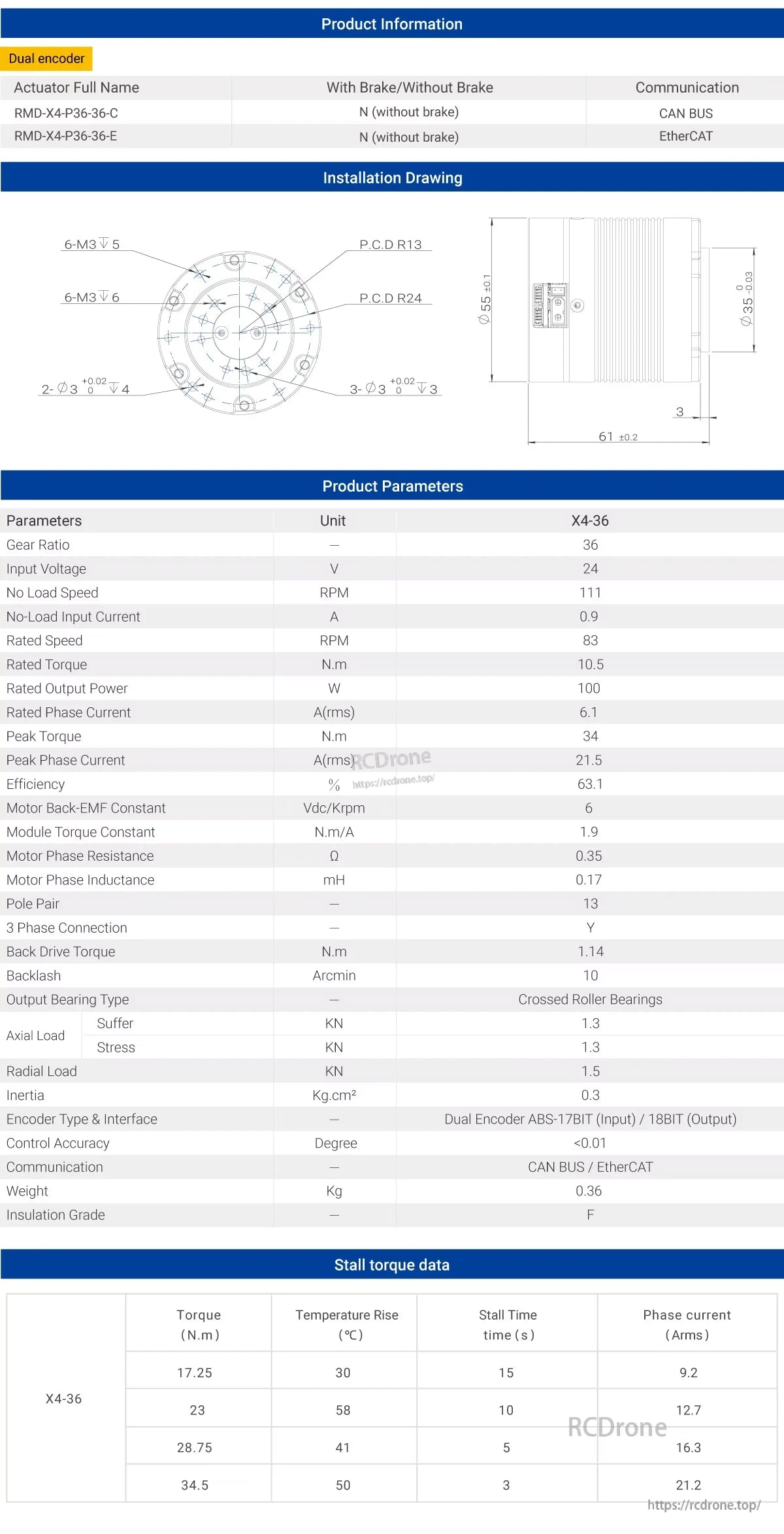
Il motore RMD-X4-P36-36 ha un doppio encoder, rapporto di trasmissione 36, ingresso 24V, uscita 100W, CAN BUS/EtherCAT. Coppia nominale: 10,5 N.m, velocità: 83 RPM, peso: 0,36 kg. I dati sulla coppia di stallo includono coppia, aumento di temperatura, tempo e valori di corrente di fase.

I dettagli dell'interfaccia includono porte di alimentazione, CAN e EtherCAT. Il pacchetto comprende motore, cavi, resistori e moduli di comunicazione. Dimensioni: 100x100x70mm. Include adattatore USB-CAN.
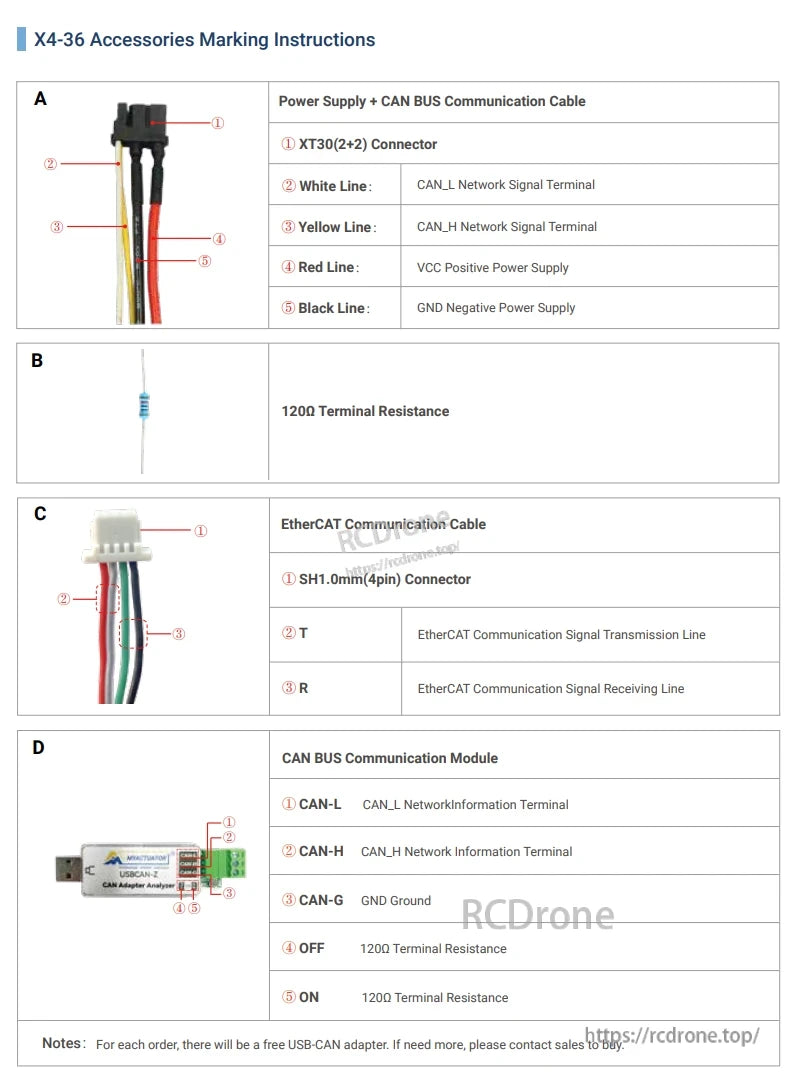
Gli accessori X4-36 includono alimentatore, cavi CAN BUS, EtherCAT, resistenza da 120Ω e modulo CAN. I dettagli coprono connettori, colori dei fili, linee di segnale e impostazioni dei terminali per le connessioni di comunicazione e alimentazione. Adattatore USB-CAN incluso con ogni ordine.
Related Collections





