





Attuatore servo MyActuator RMD-X6-60 doppio encoder 320W 20N·m 60N·m picco 48V EtherCAT CAN BUS motore giunto robotico ad alta precisione
Attuatore servo MyActuator RMD-X6-60 doppio encoder 320W 20N·m 60N·m picco 48V EtherCAT CAN BUS motore giunto robotico ad alta precisione
MyActuator
Impossibile caricare la disponibilità di ritiro
Overview
Il MyActuator RMD-X6-60 attuatore servo intelligente è un'unità di azionamento integrata compatta e ad alte prestazioni progettata per applicazioni di robotica, automazione e controllo del movimento di precisione. Dotato di interfacce di comunicazione EtherCAT e CAN BUS e di un sistema di encoder duale, questo attuatore offre un'alta densità di coppia, controllo preciso e gestione del movimento multi-modalità. È ideale per giunti robotici, bracci robotici, robot mobili e sistemi di automazione industriale che richiedono alta precisione e affidabilità.
Parametri Chiave:
-
Potenza Nominale: 320W
-
Coppia Nominale: 20N·m
-
Coppia di Picco: 60N·m
-
Velocità Nominale: 153RPM
-
Rapporto di Trasmissione: 19.612:1
-
Precision del Codificatore Doppio: 17bit Ingresso / 17bit Uscita
-
Protocolli di Comunicazione: CAN BUS, EtherCAT
-
Tensione di Ingresso: 48V
Caratteristiche Principali
-
Design del Codificatore Doppio
Codificatori integrati 17-bit per ingresso e uscita forniscono feedback preciso per un controllo del movimento accurato e monitoraggio dello stato. -
Supporto Multi-Protocolli
Interfacce EtherCAT e CAN BUS integrate garantiscono ampia compatibilità con diverse piattaforme di controllo robotico e di automazione. -
Alta Densità di Potenza e Coppia
Capace di fornire 320W di potenza continua e 60N·m di coppia di picco, soddisfacendo le esigenze di applicazioni dinamiche e a carico pesante. -
Modalità di Controllo Ibrido
Supporta il controllo ibrido di posizione, velocità e coppia, consentendo sistemi di movimento avanzati multi-assi e coordinati. -
Feedback ad Alta Precisione e Risposta Veloce
I processori MCU ad alta velocità e CAN integrati forniscono una risposta a livello di millisecondo per un controllo preciso. -
Design Compatto e Leggero
Dimensioni di 120mm × 120mm × 80mm e un peso di 0.82kg lo rendono ideale per applicazioni robotiche leggere dove spazio e peso sono critici.
Specifiche Tecniche
| Parametro | Valore |
|---|---|
| Modello | RMD-X6-P20-60-C |
| Tensione di Ingresso | 48V |
| Potenza Nominale | 320W |
| Momento Torcentale Nominale | 20N·m |
| Momento Torcentale di Picco | 60N·m |
| Velocità Nominale | 153RPM |
| Velocità a Vuoto | 176RPM |
| Corrente Nominale | 9.5A (RMS) |
| Corrente a Vuoto | 0.9A |
| Corrente di Picco | 29.1A (RMS) |
| Rapporto di Trasmissione | 19.612:1 |
| Coppie di Poli | 10 |
| Risoluzione dell'Encoder | Ingresso: 17bit / Uscita: 17bit |
| Peso | 0.82kg |
Descrizione dell'interfaccia
Porti di alimentazione e comunicazione
| Porta | Descrizione |
|---|---|
| EtherCAT_OUT | Porta di uscita EtherCAT |
| EtherCAT_IN | Porta di ingresso EtherCAT |
| CAN_L | Terminale del segnale CAN Low |
| CAN_H | Terminale del segnale CAN High |
| GND | Alimentazione negativa |
| VCC | Alimentazione positiva |
Terminali di segnale
R+/R-: Dati di feedback dal modulo alla stazione master
-
T+/T-: Segnali di comando di controllo dalla stazione master al modulo
Dimensioni e Struttura
-
Diametro: 120mm
-
Altezza: 80mm
-
Fori di montaggio: P.C.D R26.25 e R22 con 12 × fori filettati M4
-
Albero di uscita: Interfaccia flangiata standard per accoppiamento flessibile con componenti esterni
Informazioni sul confezionamento
| Articoli inclusi | Quantità |
|---|---|
| Alimentazione + Cavo di comunicazione CAN BUS | 2 pz |
| Cavo di comunicazione EtherCAT | 2 pz |
| Resistenza terminale 120Ω | 1 pz |
| Modulo di comunicazione CAN BUS (Adattatore USB-CAN) | 1 pz |
Dimensioni del confezionamento:
-
Lunghezza × Larghezza × Altezza: 120mm × 120mm × 80mm
Accessori e Connessioni
Alimentatore + Cavo CAN BUS
-
Connettore: XT30 (2+2)
-
Linea Bianca: segnale CAN_L
-
Linea Gialla: segnale CAN_H
-
Linea Rossa: alimentazione positiva VCC
-
Linea Nera: alimentazione negativa GND
Cavo di Comunicazione EtherCAT
-
Connettore: SH1.0mm (4-pin)
-
Linea T: Trasmissione del segnale di comunicazione EtherCAT
-
Linea R: Ricezione del segnale di comunicazione EtherCAT
Modulo CAN BUS
-
Terminali: CAN_L, CAN_H, CAN_G, e terminazione 120Ω selezionabile (ON/OFF)
-
Adattatore USB-CAN fornito gratuitamente con ogni ordine
Applicazioni
-
Giunti per Robot Collaborativi
-
Robot di Servizio e Umani
-
Sistemi di Sterzo o Guida per Robot Mobili
-
Bracci Robotici Industriali
-
Sistemi di Controllo del Movimento ad Alta Precisione
Piattaforme di Ricerca ed Educazione
Riepilogo
Il MyActuator RMD-X6-60 integra encoder duali ad alta precisione, protocolli di comunicazione EtherCAT e CAN BUS, alta densità di coppia e un fattore di forma compatto, rendendolo una soluzione versatile e affidabile per robotica e automazione industriale. Con la sua potenza di 320W, coppia di picco di 60N·m e feedback ad alta risoluzione a 17 bit, questo attuatore servo fornisce prestazioni eccezionali e precisione di controllo per progetti di robotica avanzata.
Dettagli
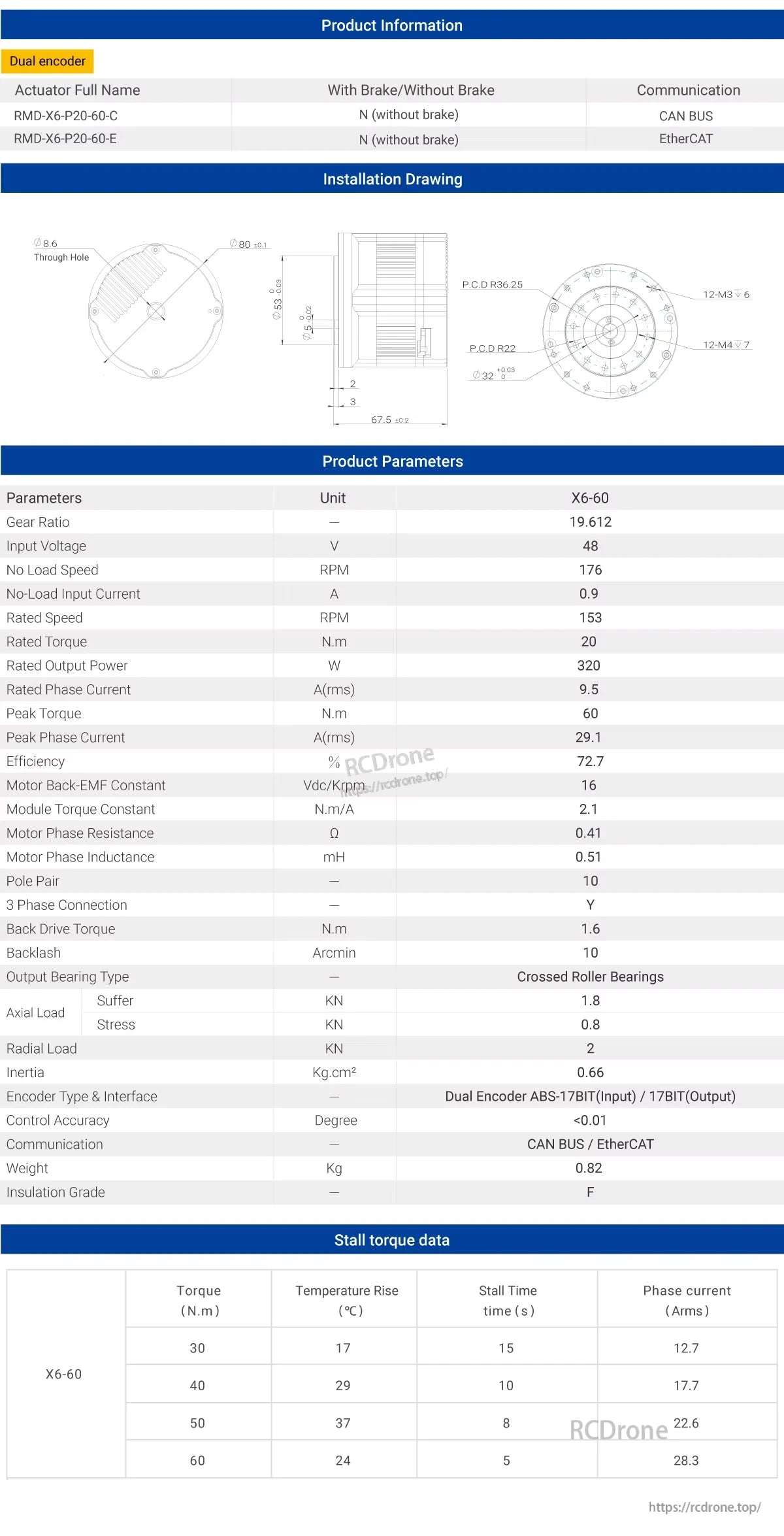
L'attuatore servo RMD-X6-60 ha un encoder duale, rapporto di trasmissione di 19.612, ingresso a 48V, potenza di 320W, comunicazione CAN BUS/EtherCAT, 20 N.mcoppia nominale, 60 N.mcoppia di picco e pesa 0.82 kg.
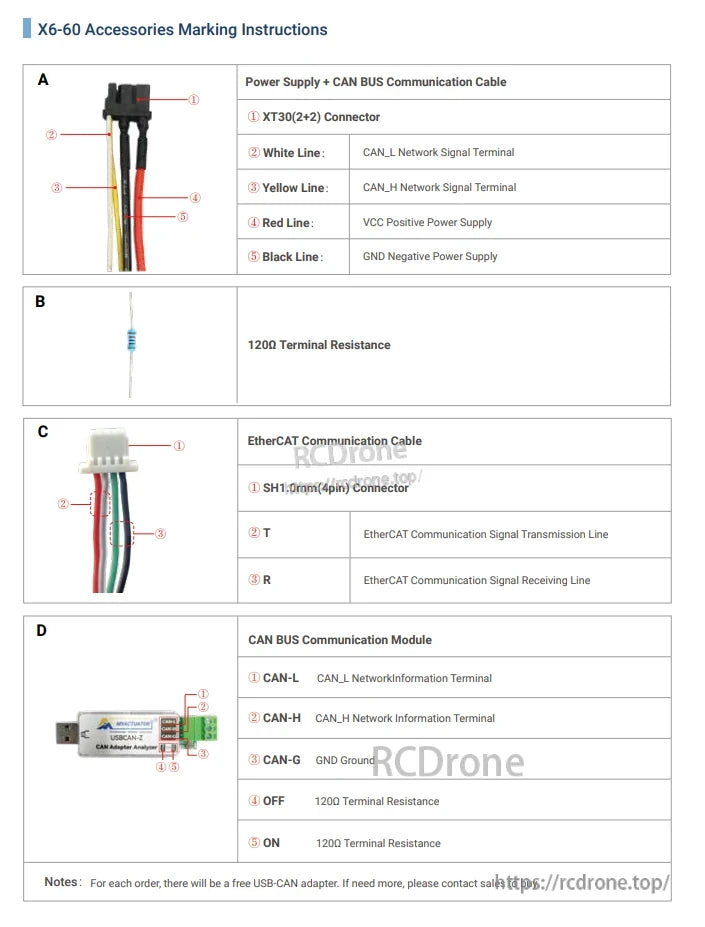
Gli accessori X6-60 includono cavo di alimentazione e CAN BUS con fili codificati a colori, resistenza terminale di 120Ω, cavo EtherCAT con linee T/R e un modulo CAN BUS con terminali per CAN-L, CAN-H, GND e impostazioni di resistenza terminale. Un adattatore USB-CAN gratuito è incluso per ordine.

Attuatore servo RMD-X6-P20-60-C con EtherCAT+CAN BUS, 19.612 rapporto, ingresso 48V, velocità nominale 153RPM, coppia 20Nm, uscita 320W, doppio encoder, MCU ad alta velocità e chip CAN, cuscinetto a rulli incrociati.
Doppio Encoder ABS-17BIT Ingresso/Uscita, Attuatore Servo X6-60, 300W, 20N.m, 128rpm, supporta il controllo ibrido forza-posizione, controllo preciso della coppia.
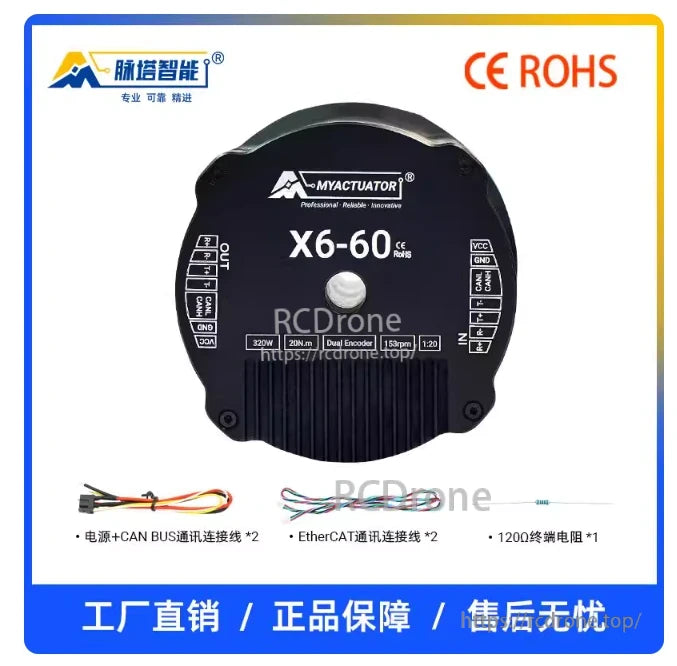
Attuatore servo X6-60, 320W, 20N.m, doppio encoder, 158rpm, rapporto 1:20, con cavi CAN BUS e EtherCAT, terminatore 120Ω, certificato CE ROHS.

Imballaggio dell'Attuatore Servo RMD-X6-60 con cablaggio CAN BUS, cavo di alimentazione e resistore di terminazione 1200.
Related Collections





