




Attuatore motore servo MyActuator RMD-X8-120 48V 574W 110N·m coppia di picco doppio encoder EtherCAT CAN BUS per robot e bracci robotici
Attuatore motore servo MyActuator RMD-X8-120 48V 574W 110N·m coppia di picco doppio encoder EtherCAT CAN BUS per robot e bracci robotici
MyActuator
Impossibile caricare la disponibilità di ritiro
Panoramica
Il servo motore MyActuator RMD-X8-120 integra un riduttore planetario, encoder duali da 17 bit, e un controller di guida ad alte prestazioni, offrendo una coppia potente e un controllo del movimento preciso. Con una potenza nominale di 574W, una coppia nominale di 43N·m, e fino a coppia di picco di 110N·m, è ideale per robot umanoidi, bracci robotici, robot quadrupedi e altri sistemi di automazione intelligente. Supportando i protocolli CAN BUS ed EtherCAT, garantisce un'integrazione senza soluzione di continuità con le piattaforme robotiche moderne.
Specifiche Chiave
| Parametro | Valore |
|---|---|
| Modello | RMD-X8-P20-120-C |
| Rapporto di Trasmissione | 19.612:1 |
| Voltaggio | 48V |
| Velocità a vuoto | 158 RPM |
| Velocità nominale | 127 RPM |
| Corrente a vuoto | 1.6 A |
| Momento torcentale nominale | 43 N·m |
| Momento torcentale di picco | 110 N·m |
| Corrente di fase di picco | 43.8 A (rms) |
| Potenza nominale | 574 W |
| Peso | 1.4 kg |
| Dimensioni | Φ96 mm × 76 mm di altezza |
| Tipo di Encoder | Encoder Doppio ABS-17BIT (Ingresso) / 17BIT (Uscita) |
| Comunicazione | CAN BUS / EtherCAT |
Interfaccia & Connettività
-
EtherCAT IN/OUT per comunicazione ad alta velocità e in tempo reale
-
CAN_H & CAN_L terminali per networking CAN BUS
-
VCC/GND per ingresso di alimentazione (48V)
-
Canali di segnale (T-/T+/R-/R+) per feedback di comando e stato
Accessori Inclusi
-
2× Alimentatore + cavi di comunicazione CAN BUS
2× cavi di comunicazione EtherCAT
-
1× resistore terminale da 120Ω
-
1× modulo di comunicazione CAN BUS con adattatore USB-CAN
Caratteristiche principali
-
Controllo ad alta precisione – Doppi encoder assoluti da 17 bit consentono un controllo preciso di posizione, velocità e coppia.
-
Alta coppia di uscita – Coppia nominale 43N·m, picco 110N·m per carichi impegnativi.
-
Design integrato – Struttura compatta con riduttore planetario e modulo di azionamento per un'installazione facile.
-
Supporto per doppio protocollo – Compatibile con CAN BUS e EtherCAT per un'integrazione flessibile.
-
Costruzione robusta – Cuscinetti a rulli incrociati ad alta resistenza garantiscono durata sotto carichi pesanti.
Applicazioni
-
Giunti di robot umanoidi
-
Bracci robotici collaborativi
-
Robot quadrupedi e bipedi
-
Sistemi di esoscheletro
-
Piattaforme mobili autonome
-
Automazione industriale ad alta precisione
Dettagli

Il servocomando M-RMD X8-120 offre doppio encoder, ingresso 48V, 43 N.mtorque, potenza 574W, CAN BUS/EtherCAT, rapporto di trasmissione 19.612, 10 coppie di poli, peso 1.40 kg e dettagli sul torque di stallo.
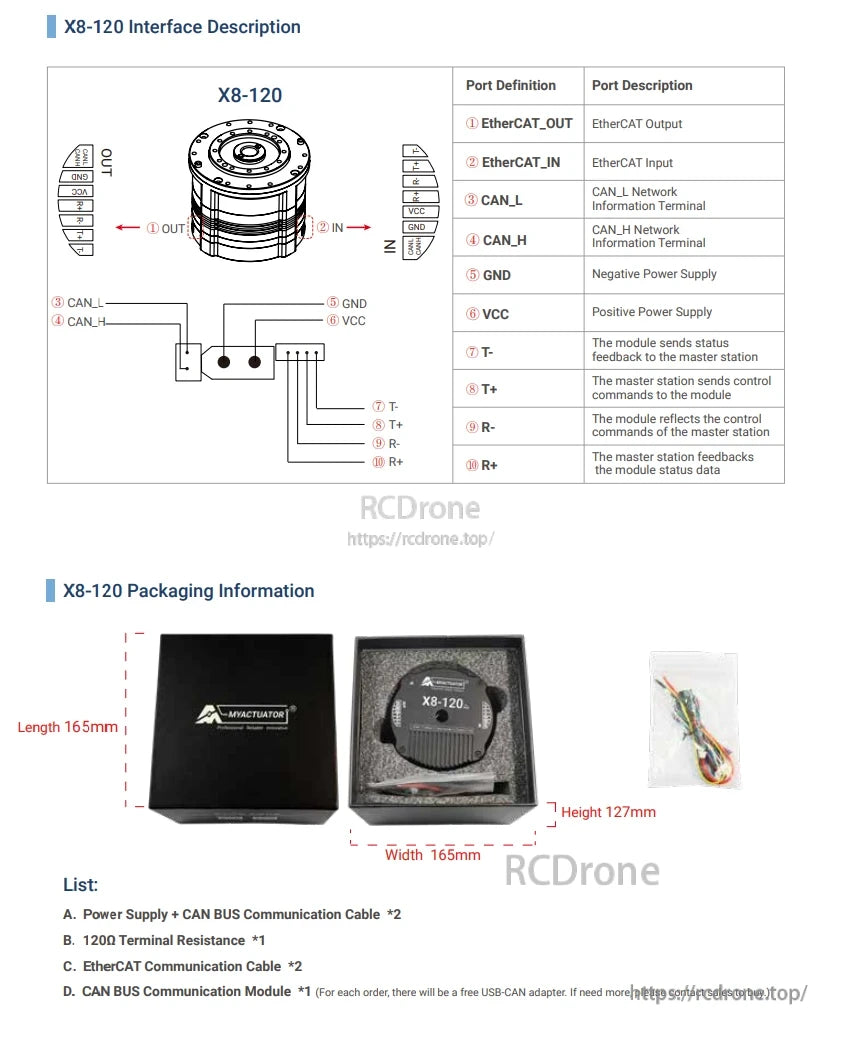
L'interfaccia servo X8-120 supporta EtherCAT e CAN bus, include connessioni di alimentazione, segnale e adattatore USB-CAN. Imballaggio: 165x165x127mm. Contiene alimentatore, cavi, resistenza terminale e modulo di comunicazione.

Gli accessori del MyActuator X8-120 includono alimentatore con cavo CAN BUS, resistenza terminale da 120Ω, cavo EtherCAT e modulo CAN BUS. I dettagli coprono connettori, funzioni dei cavi e terminali per comunicazione e alimentazione. Adattatore USB-CAN gratuito incluso per ordine.

MyActuator motore servo X8-120, 574W, 45N.m, doppio encoder, 127rpm, rapporto 1:20. Include cavi power+CAN BUS, cavi EtherCAT e terminatore da 120Ω. Certificato CE ROHS.

Servo con doppio encoder EtherCAT + CAN BUS, modello RMD-X8-P20-120-C, 48V, rapporto di riduzione 19.612, 127RPM, coppia 43N.m, potenza 574W, peso 1.4kg, dotato di MCU ad alta velocità, chip CAN e cuscinetti a rulli incrociati.

Encoder Doppio ABS-17BIT Ingresso/Uscita, X8-120CL, supporta il controllo ibrido forza-posizione, controllo della coppia preciso.

Servo MYACTUATOR X8-120 con cavi di alimentazione, CAN BUS, EtherCAT e terminatore da 120Ω. Il packaging include due cavi per ciascuna linea di alimentazione e comunicazione.

Modulo di ingranaggi planetari integrato, doppio encoder, comunicazione EtherCAT/CAN, coppia massima 120N.m, dimensioni 96mm×76mm, per giunti robotici.
Related Collections




