





Mano Robotica OYMotion ROH-AP001, 6 DOF, 11 giunti, sensori di forza, UART/RS485/CAN, controllo PID, 0,7 s
Mano Robotica OYMotion ROH-AP001, 6 DOF, 11 giunti, sensori di forza, UART/RS485/CAN, controllo PID, 0,7 s
OYMotion
Impossibile caricare la disponibilità di ritiro
Panoramica
La mano robotica OYMotion ROH-AP001 è una mano robotica con 11 giunti mobili e 6 driver motore integrati che forniscono 6 gradi di libertà attivi. Un algoritmo di controllo motore PID integrato consente una presa e manipolazione di oggetti precisa e ripetibile. Ogni dito integra un sensore di forza per il monitoraggio in tempo reale e il controllo a ciclo chiuso della forza di presa. Le interfacce fisiche includono UART, RS485 o CAN FD, con supporto per il protocollo seriale SerialCtrl dedicato, ModBus-RTU e protocollo CAN. Le piattaforme ROS/ROS2 sono supportate per lo sviluppo secondario tramite SDK (richiesta di accordo di licenza).
Caratteristiche principali
- 6 DOF attivi e 11 articolazioni; dita motorizzate indipendentemente per una presa naturale.
- Driver motore integrati e controllo PID; tutta l'attuazione integrata nella mano.
- Sensori di forza su ogni dito con feedback tattile e controllo della forza in tempo reale.
- Rotazione del pollice alimentata più design dei dita pieghevoli.
- Operazione touch-screen supportata sulle punte delle dita.
- Movimento veloce: 0,7 s per la flessione/estensione a gamma completa e 0,7 s per la rotazione a gamma completa del pollice.
- Capacità di carico: fino a 30 Kg di carico passivo per quattro dita (piegate), 10 Kg per dito (piegato), 8 Kg per dito (esteso).
- Dimensioni e proporzioni simili a quelle umane; cuscinetti morbidi per le dita e guanto in silicone; design del polso personalizzato; segnalatore di messaggi.
- Interfacce e protocolli: UART/RS485/CAN con SerialCtrl e ModBus-RTU; CAN a 1M baud.
- Materiali evidenziati: lega di alluminio, lega di zinco, acciaio inossidabile, silicone, plastica.
Specifiche
| DOF attivo | 6 |
| Giunti mobili (articolazioni) | 11 |
| Distanza verticale dalla punta del dito medio al polso | 183 mm |
| Distanza verticale dalla punta del pollice al polso | 95 mm |
| Lunghezza del pollice | 111 mm |
| Larghezza massima del palmo | 82 mm |
| Diametro del polso | 49 mm |
| Angolo massimo di apertura e chiusura del lato del pollice | 0~31 ° |
| Angolo massimo di apertura e chiusura del pollice al palmo | 0~50 ° |
| Angolo di rotazione laterale del pollice | 0~90 ° |
| Tempo di flessione/estensione per l'intero range alla massima velocità | 0.7 second |
| Tempo di rotazione del pollice per l'intera gamma alla massima velocità | 0.7 second |
| Forza attiva di ciascuna punta delle dita in stato teso | ≥0.5 Kgf |
| Forza attiva di ciascuna punta delle dita in stato piegato | ≥1.0 Kgf |
| Forza attiva massima della punta del pollice | ≥1.0 Kgf |
| Carico passivo massimo per quattro dita in stato piegato | 30 Kg |
| Carico passivo massimo per ciascuna dita in stato piegato | 10 Kg |
| Carico passivo massimo per ciascuna dita in stato esteso | 8 Kg |
| Funzione touch screen delle dita | Supportato |
| Feedback della forza delle dita | Supportato |
| Temperatura ambiente di lavoro | -10 °C ~ +40 °C |
| Umidità ambiente di lavoro | Umidità relativa massima 85% |
| Durata di vita del design | 3 anni |
| Peso (incluso il polso) | 640 g ± 5 g |
| Interfaccia di comunicazione | UART/RS485/CAN |
| Velocità di trasmissione | UART: 9600/19200/38400/57600/115200/230400/460800/921600; RS485: 9600/19200/38400/57600/115200/230400/460800; CAN: 1M |
| Protocollo supportato | UART: SerialCtrl, ModBus-RTU; RS485: SerialCtrl, ModBus-RTU; CAN: SerialCtrl |
| Materiali | Lega di alluminio; lega di zinco; acciaio inossidabile; silicone; plastica |
Applicazioni
- Effettori finali robotici e robot umanoidi.
- Attrezzature educative e di ricerca.
- Protesi bioniche.
- Automazione industriale e sistemi AGV.
Per assistenza agli ordini, guida all'integrazione o supporto tecnico, si prega di contattare [email protected] or visitare https://rcdrone.top/.
Manuali
Dettagli

Il ROHand offre un'accuratezza di posizionamento di ±1 mm grazie al controllo del motore PID integrato e offre sei gradi di libertà attivi per simulare i movimenti della mano umana come pizzicare e afferrare. Ideale per robot umanoidi, end-effector robotici, sistemi di ispezione, protesi bioniche intelligenti e applicazioni educative o di ricerca, il suo design supporta una manipolazione versatile e precisa in compiti complessi.
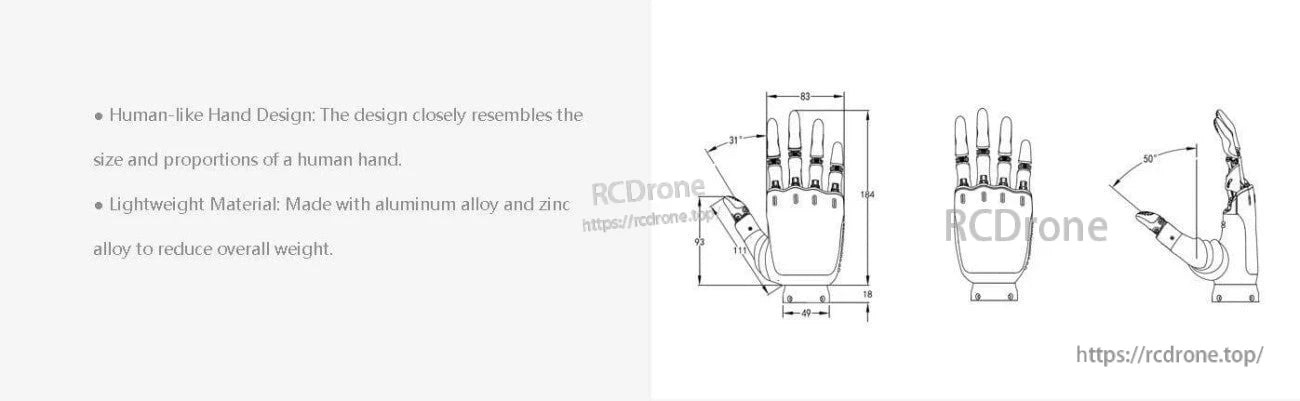
Mano robotica aggraziata simile a quella umana con costruzione in lega di alluminio e zinco leggera e dimensioni precise.

La mano robotica OYMotion ROH-AP001 mimica le proporzioni umane, con dita articolate e sensori per una manipolazione robotica precisa e in scala reale.
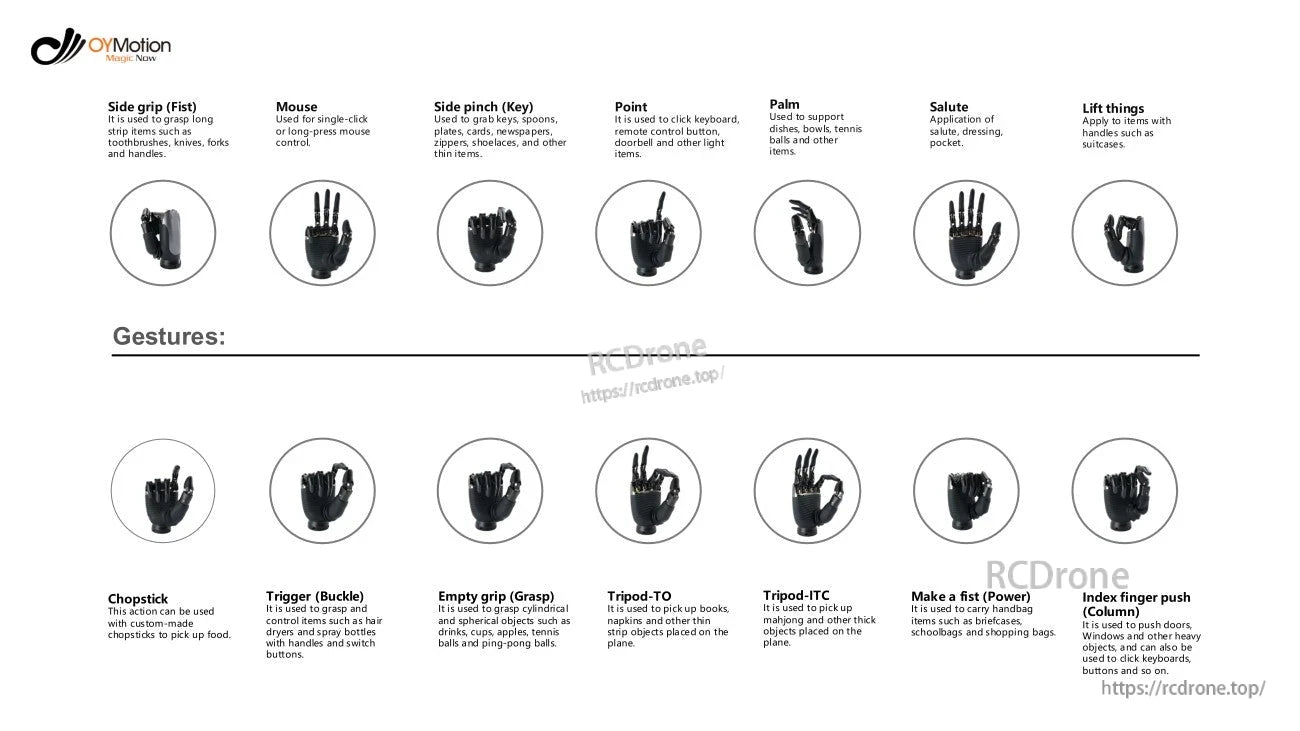
La mano robotica OYMotion esegue 14 gesti precisi—come afferrare, puntare e sollevare—per gestire compiti quotidiani come usare le bacchette, trasportare borse o cliccare su tastiere, dimostrando una destrezza avanzata e utilità pratica.

La mano robotica OYMotion offre dita motorizzate, design pieghevole, cuscinetti morbidi, pollice alimentato, guanto in silicone, attuazione integrata, segnalatore acustico, polso personalizzato e connettore RS485 per una presa naturale e aggraziata.
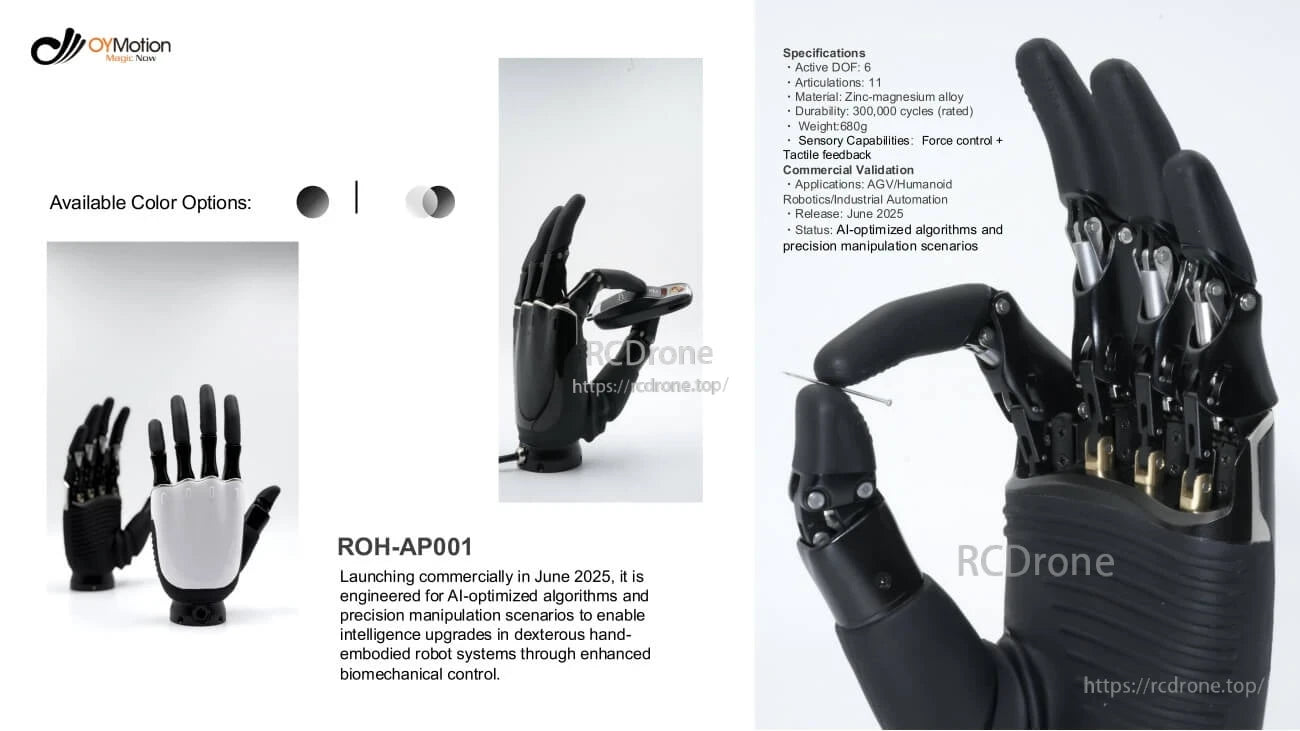
La mano robotica OYMotion ROH-AP001 ha 6 DOF attivi, 11 articolazioni, una costruzione in lega di zinco-magnesio, durata di 300k cicli, pesa 680g e offre feedback di forza/tattile per compiti di intelligenza artificiale e precisione—lancio previsto per giugno 2025.

La mano robotica OYMotion ROH-AP001 ha dita motorizzate, un pollice alimentato, guanto in silicone e attuazione integrata. Costruita in alluminio, zinco, acciaio, silicone e plastica, include un segnale acustico, polso personalizzato, protocollo RS485, design pieghevole e molle di pressione.
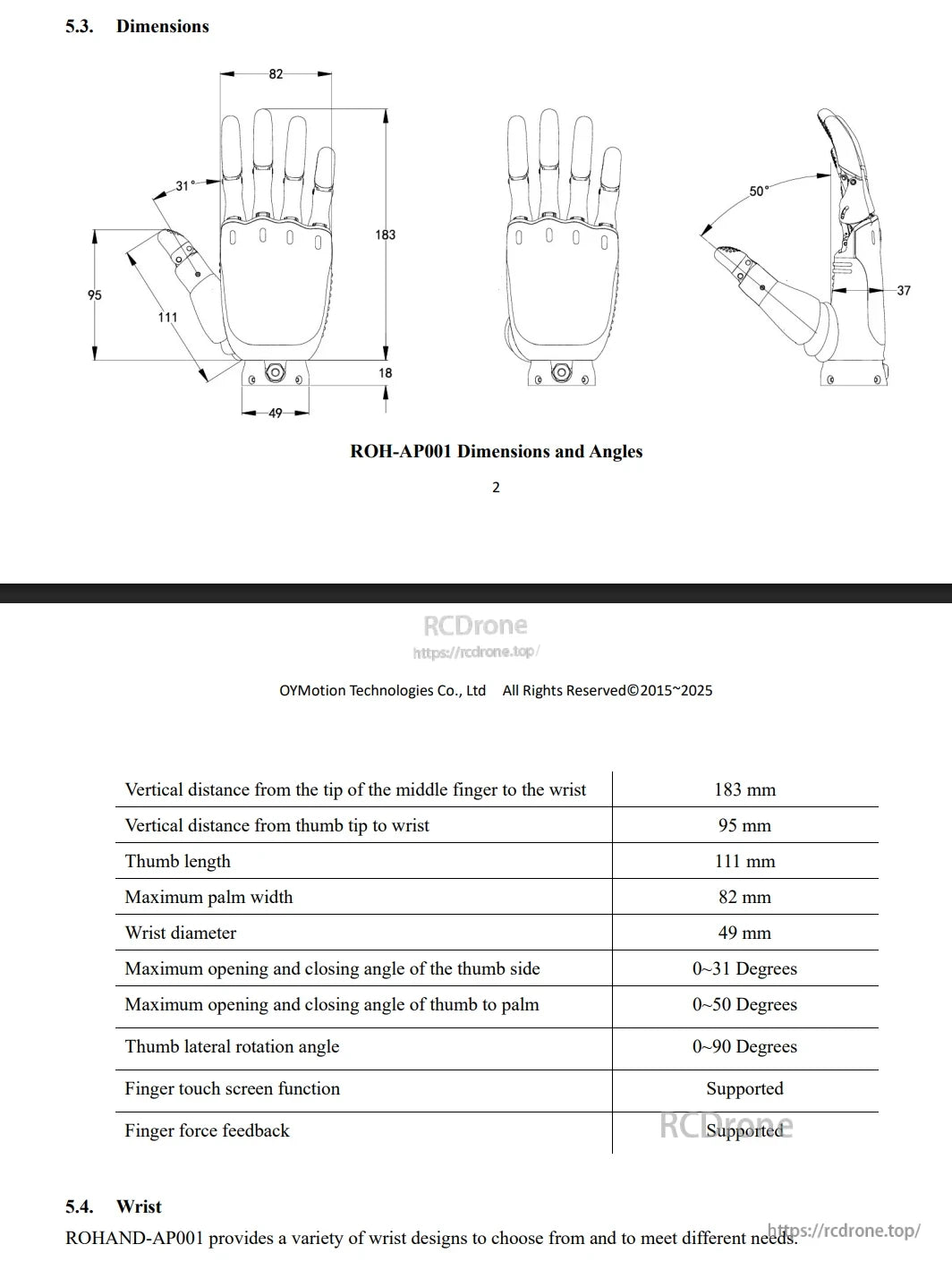
Le dimensioni della mano robotica ROH-AP001 includono un'altezza dalla dita al polso di 183mm, 95mm dal pollice al polso, 111mm di lunghezza del pollice, 82mm di larghezza del palmo, 49mm di diametro del polso. Angoli del pollice: 0-31° laterale, 0-50° verso il palmo, 0-90° di rotazione. Supporta touchscreen e feedback di forza.
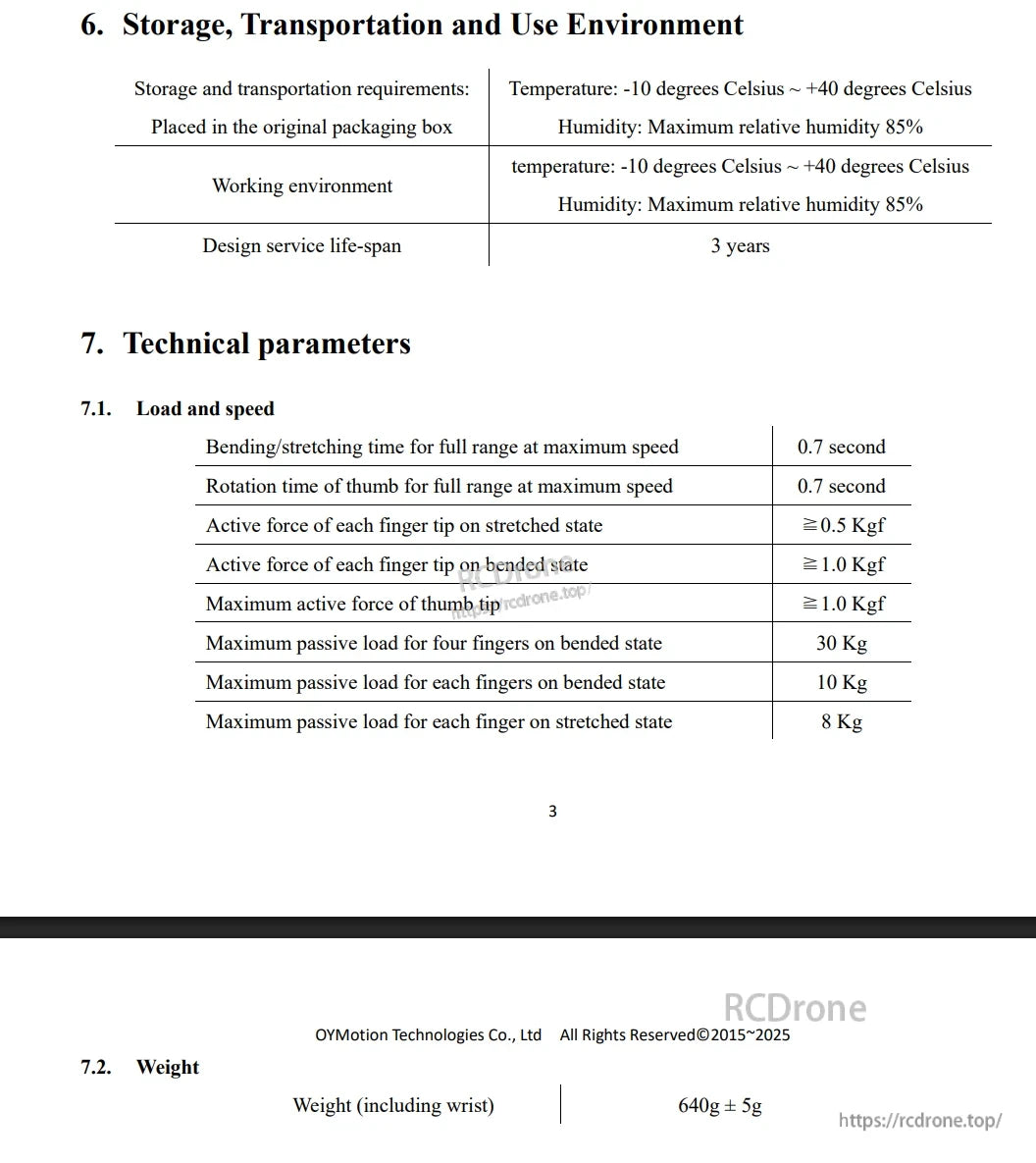
La mano robotica OYMotion ROH-AP001 opera tra -10°C e +40°C, con un'umidità massima dell'85%. Durata di vita del design: 3 anni. Peso: 640g ±5g. Forza attiva della dita ≥0.5–1.0 Kgf; carico passivo fino a 30kg per quattro dita.
Related Collections





