SPECIFICHE del controller di volo Pixhawk 2.4.8 PX4 PIX a 32 bit
Usa: Veicoli e giocattoli telecomandati
Aggiornamento parti/accessori: Telaio
Forniture utensili: Rettificato
Parametri tecnici: Valore 3
Periferiche/dispositivi di controllo remoto: Controller remoto
Età consigliata: 12+a,14+a
Parti e accessori RC: Regolatori di velocità
Origine: Cina continentale
Numero modello: Pixhawk 2.4.8
Materiale: Metallo
Attributi trazione integrale: Motori
Per tipo di veicolo: Aerei
Nome del marchio: Readytosky
ReadyToSky è un fornitore professionale di accessori per moduli FPV RC. Se sei interessato a saperne di più sulle opzioni di acquisto all'ingrosso o in blocco, non esitare a contattarci.
Caratteristiche:
Pixhawk 2.4.8 supporta l'ultimo firmware ufficiale Ardupilot e il firmware PX4.
1. I processori avanzati ARM CortexM4 a 32 bit ad alte prestazioni (flash da 2 MB) possono eseguire il sistema operativo in tempo reale NuttX RTOS;
2. 14 uscite PWM/servo;
3. Interfaccia bus (UART, I2C, SPI, CAN);
4. L'alimentazione di backup integrata e il controller di backup si guastano, il controller primario esegue il failover sul controllo di backup è sicuro;
5. Fornire modalità automatica e manuale;
6. Fornire ingresso di alimentazione e failover ridondanti;
7. Luci LED multicolori;
8. Fornire un'interfaccia cicalino multitono
9. Registrazione dati di volo su Micro SD;
Specifiche:
Interfaccia
1,5 UART compatibile ad alta tensione 1, 2 con controllo di flusso hardware
2. 2 PUÒ
Ingresso compatibile ricevitore satellitare 3.Spektrum DSM / DSM2 / DSM-X
4.Ingressi e uscite compatibili con Futaba SBUS
Ingresso segnale 5.PPM
6.Ingresso RSSI (PWM o tensione)
7.I2C
8.SPI
Ingresso 9.3.3 e 6,6VACC
10. Interfaccia MICRO USB esterna
Display OLED Pixhawk OSD per Pixhawk 2.4.8 PIX PX4 Controllo di volo Display di volo Stato del volo Connesso all'interfaccia I2C
È adatto per il controllo di volo di Pixhawk, ecc. e viene utilizzato per visualizzare le informazioni sullo stato dell'aereo. Questo modulo è collegato all'interfaccia I2C di Pixhawk
Nota: per aggiornare il firmware del display a 3.5 o superiore, impostare NTF_DISPLAY_TYPE su 1 in Masion Planner e riavviare Pixhawk.
COME utilizzare il modulo WIFI per PIXHAWK?
1.Come connettersi?
utilizza la linea 6P per collegarsi al controller di volo pixhawk.
A causa dei diversi firmware, alcuni firmware possono utilizzare due porte, altri firmware possono utilizzare solo una delle porte. Quindi trova una delle porte disponibili per la connessione.
SE si utilizza il firmware PX4, è possibile utilizzare solo TELEM1, non è possibile utilizzare TELEM2.
Per il firmware Ardupilot, si consiglia di utilizzare la porta TELEM2. Oppure trova una delle porte disponibili per la connessione.
Per il firmware PX4, utilizzare la porta TELEM1.
2.Come si usa?
Nota: quando si utilizza la connessione radiotelemetria Wifi, è necessario utilizzare il modulo di alimentazione 3DR o l'ESC 5V per fornire alimentazione al controllo di volo. Impossibile inserire l'USB perché la priorità USB è superiore alla radiotelemetria. Se il cavo USB è collegato, non può essere utilizzato per la trasmissione radiotelemetrica.
Il nome dell'hotspot Wi-Fi è Drone, quindi utilizza il telefono o il computer per connetterti a questo hotspot, la password è 12345678.
Nota: alcuni dispositivi (ad esempio alcuni sistemi IOS iPhone) non possono ottenere l'IP automaticamente, è necessario impostare manualmente.
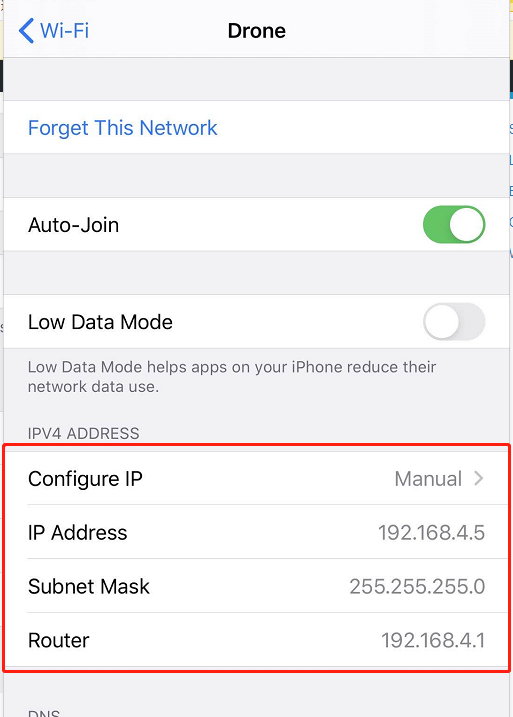
Imposta Configura IP su Manuale. Impostare l'indirizzo IP come "192.168.4.5" o altro, ma non è possibile impostarlo come "192.168.4.1", l'ultimo numero non può superare 254. Impostare la maschera di sottorete come "255.255.255.0" (deve impostare questo valore, non altro). Imposta il router come "192.168.4.1" (deve impostare questo valore, non altro)
Quando il tuo dispositivo si connette correttamente a questo hotspot, puoi utilizzare il browser per visitare http://192.168.4.1 , puoi modificare i parametri.
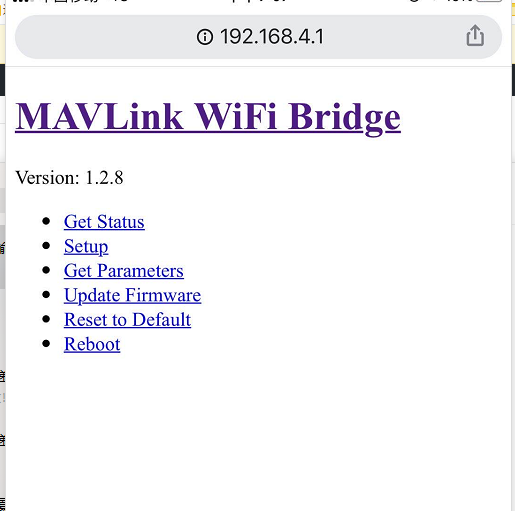
Nota, il pulsante è un pulsante di ripristino, non un pulsante di riavvio, quando si preme il pulsante, tutti i parametri verranno impostati sui valori predefiniti se si modifica qualche parametro.
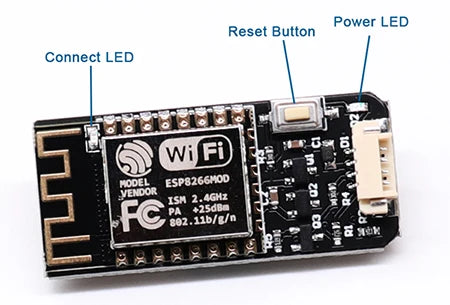
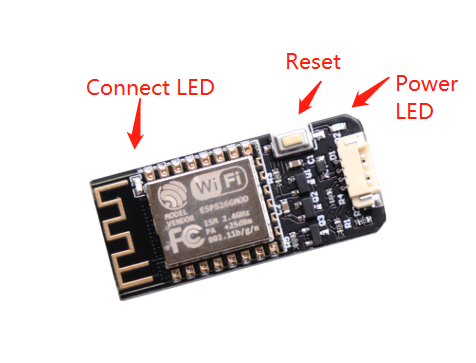
LED di alimentazione: all'accensione, il LED rosso è acceso.
LED di connessione: quando la connessione con il controllo di terra (ad esempio, Mission Planner o Qgroundcontrol) avviene correttamente, il LED blu lampeggia. quando si disconnette dal controllo di terra, il LED blu è acceso.
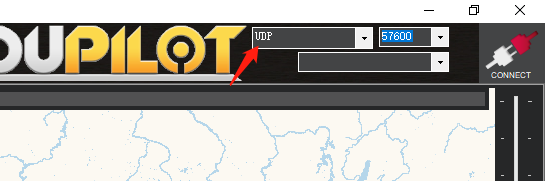
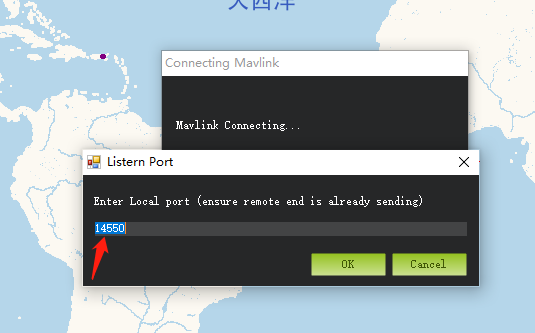
1.Come utilizzare per il pianificatore di missione?
Innanzitutto, collega correttamente il tuo PC all'hotspot Drone. Seleziona UDP. Quindi fai clic sul pulsante "Connetti" e utilizza la porta 14550. Fare clic su "Ok". Non è necessario scegliere la velocità di trasmissione. La velocità di trasmissione predefinita del modulo Wi-Fi è 57600. Ma può funzionare anche 115200 o un altro.
2.Come utilizzare per il telefono
Per Android: scarica qgroundcontrol (solo per pixhawk, non per APM)
da qui,http://qgroundcontrol.com/downloads/
Scarica DroidPlanner da qui,https://github.com/DroidPlanner/Tower/releases
Per iPhone (IOS): cerca qgroundcontrol nell'app store.
qgroundcontrol (solo per pixhawk, non per APM) può connettersi automaticamente, DroidPlanner deve scegliere la porta "UDP" e "14550" prima di connettersi a groundcontrol.
WIFI V3.0 utilizza CPU a 32 bit, supporta TCP e UDP
Sito web WIFI V3.0 DroneBridge
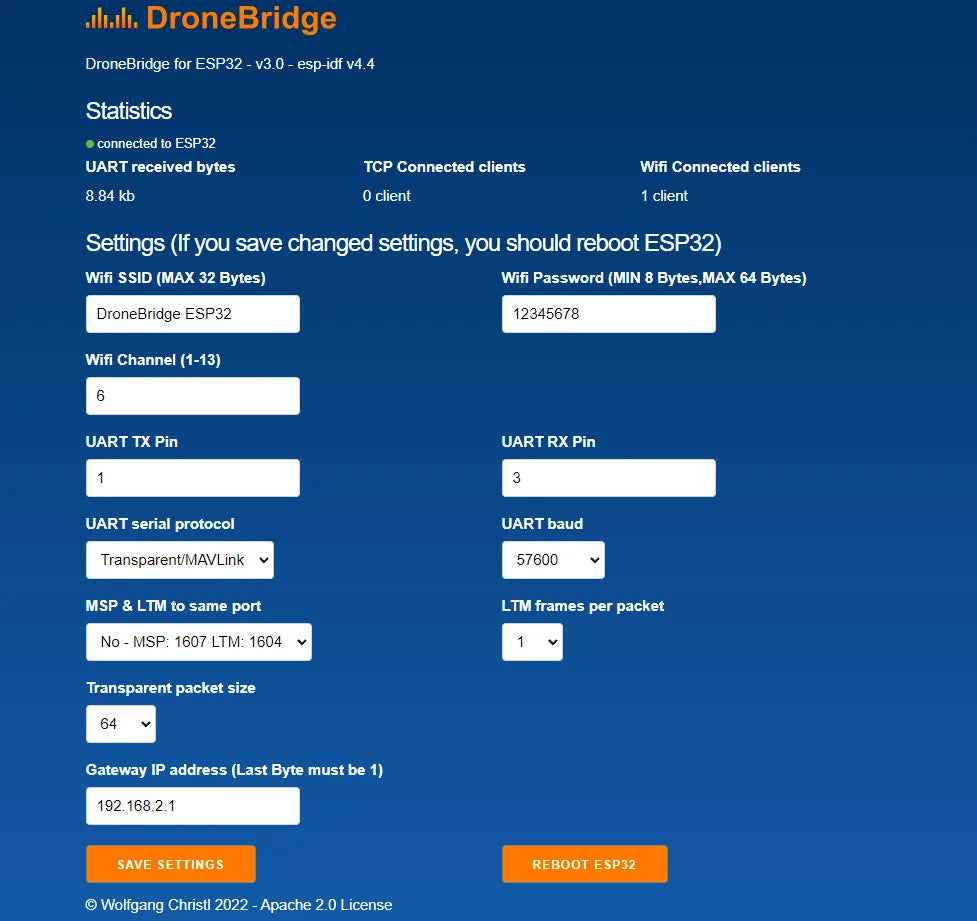
ulul; DroneBridge per ESP32 v3.0 esp idf v4.4 Statistica connessa a ESP 32 UART ricevuto byte TCP Client connessi Wifi Password (MIN 8 byte, MAX 64 byte) se salvi le impostazioni modificate, devi riavviare ESP33.
(invialo come preferisci)

Pixhawk 2.4.8 FC + 4G TF Card + MBN GPS Supporto GPS + OSD + Modulo di alimentazione Ammortizzatore I2C PPM RGB Pulsante di sicurezza Buzzer Wifi Telemetria Cavi Ontk 'Modulo GPs PPM 1'

Il pacchetto include: Pixhawk 2.4.8 controller di volo, scheda TF 4G, ammortizzatore, modulo I2C, modulo PPM, modulo RGB, display OLED, pulsante di sicurezza con cicalino e cavi per tutti i componenti.
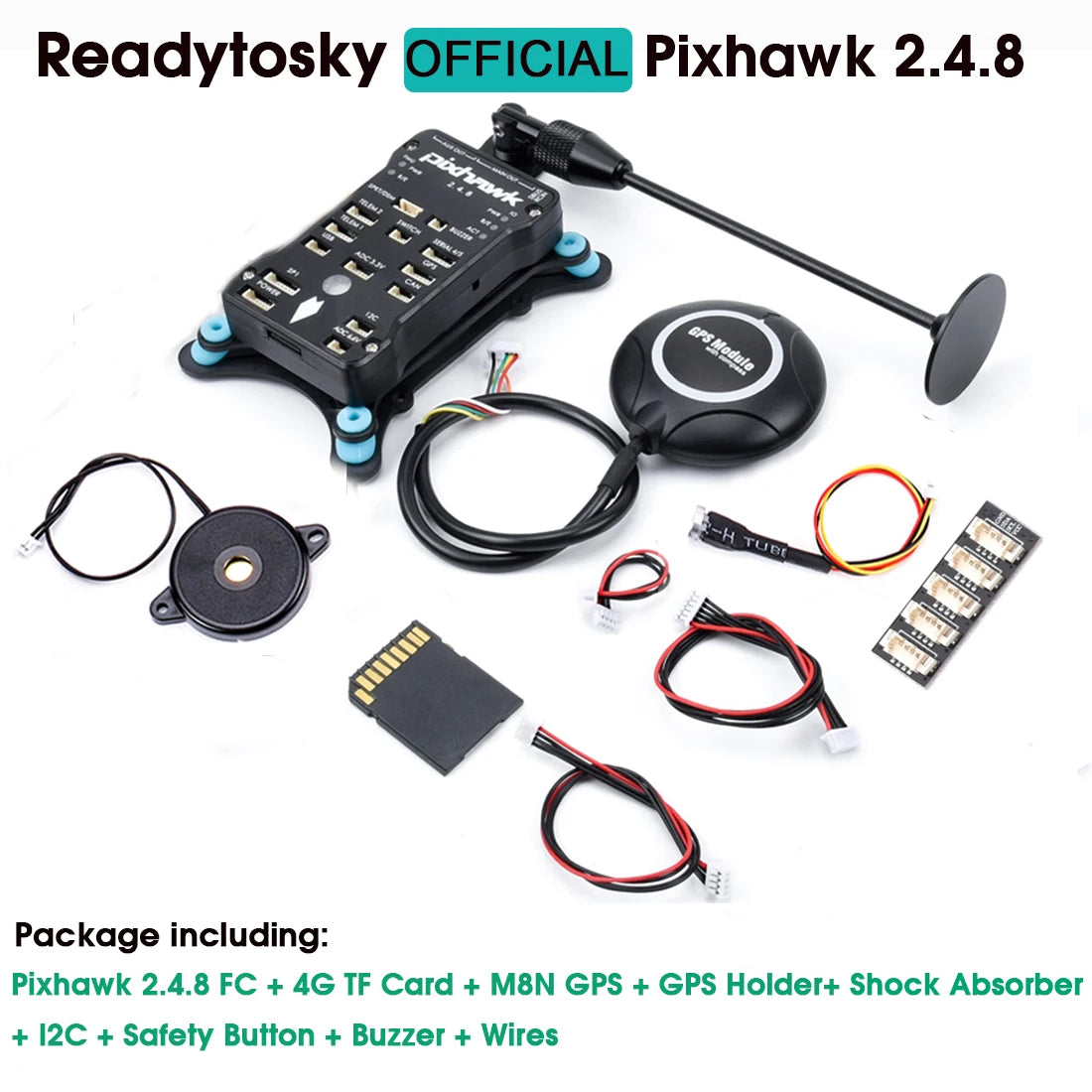
Il pacchetto include: Pixhawk 2.4. 8, una scheda TF 4G, modulo GPS MBN, supporto GPS, ammortizzatore, pulsante di sicurezza I2C, cavi del cicalino e un modulo telemetrico opzionale per la trasmissione dati wireless.

Il pacchetto include: Pixhawk Controller di volo 2.4.8, scheda TF 4G, ammortizzatore, display OLED, modulo I²C, modulo PPM (modulazione della posizione dell'impulso), pulsante di sicurezza con cicalino e cavi.

Questo volo Pixhawk 2.4.8 il controller viene fornito con una scheda TF 4G, pulsante di sicurezza, cicalino e cavi per uscite ausiliarie. Dispone inoltre di un modulo TELEM con due ingressi di alimentazione, una porta seriale e canali ADC (convertitore analogico-digitale). Inoltre, dispone di funzionalità GPS e richiede alimentazione per funzionare.

La calibrazione VCC, GPS e scheda SD è necessaria in modalità 'Stabilizzata' con una tensione della batteria di 11,32 V. Inoltre, non sono disponibili dati GPS. Il preinserimento è stato archiviato e l'EKF (filtro Kalman esteso) è abilitato.