Nota:
PIXHAWK 2.4.8 supporta gli ultimi firmware FMUV3 ardupilot e PX4.
1. Puoi selezionare la scocca bianca o nera del controller di volo PIXHAWK, l'hardware è lo stesso. La scocca bianca è più bella. Se hai bisogno della scocca bianca, lascia un messaggio.
2.Se il pacco ha Modulo di alimentazione 3DR, di default invieremo il modulo di alimentazione 3DR con spina XT60, se ne hai bisogno, lascia un messaggio.
3. Pixhawk offre molti pacchetti. Ti invieremo il pacchetto che hai selezionato.
Pixhawk PX4 Autopilot PIX 2.4.8 32 Bit Flight Controller
Caratteristiche:
Pixhawk 2.4.8 supporta l'ultimo firmware ufficiale ardupilot e il firmware PX4.
1. I processori avanzati ARM CortexM4 a 32 bit ad alte prestazioni (flash da 2 MB) possono eseguire il sistema operativo in tempo reale NuttX RTOS;
2. 14 Uscita PWM / servo;
3. Interfaccia bus (UART, I2C, SPI, CAN);
4. In caso di guasto dell'alimentazione di backup integrata e del controller di backup, il controller primario esegue il failover sul controllo di backup ed è sicuro;
5. Fornire modalità automatiche e manuali;
6. Fornire alimentazione ridondante e failover;
7. Luci LED multicolori;
8. Fornire un'interfaccia buzzer multitono
9. Micro SD per la registrazione dei dati di volo;
Specifiche:
Interfaccia
1.5 UART 1, 2 compatibile con alta tensione con controllo del flusso hardware
2. 2 PUÒ
3. Ingresso compatibile con ricevitore satellitare Spektrum DSM / DSM2 / DSM-X
4. Ingressi e uscite compatibili con Futaba SBUS
5. Ingresso segnale PPM
6. Ingresso RSSI (PWM o tensione)
7.I2C
8.SPI
Ingresso 9.3.3 e 6.6VADC
10.Interfaccia MICRO USB esterna
Modulo GPS M9N
M9N è un modulo GPS comunemente utilizzato nei veicoli aerei senza pilota, con le seguenti caratteristiche e applicazioni:
Posizionamento ad alta precisione: M9N adotta la tecnologia GNSS avanzata, supporta più sistemi di navigazione satellitare e può fornire informazioni di posizionamento della posizione ad alta precisione. Per i veicoli aerei senza pilota, può ottenere posizionamento e navigazione accurati.
Supporto multisistema: M9N supporta più sistemi di navigazione satellitare, tra cui GPS, GLONASS, Galileo, BeiDou, ecc. Ciò consente ai droni di ricevere più segnali satellitari contemporaneamente, migliorando la precisione e l'affidabilità del posizionamento.
Posizionamento rapido: M9N ha tempi di avvio a freddo e a caldo rapidi, che gli consentono di ottenere rapidamente segnali satellitari ed eseguire il posizionamento, il che lo rende fondamentale per il decollo rapido e l'esecuzione dei compiti dei velivoli senza pilota.
Elevata capacità anti-interferenza: M9N ha eccellenti prestazioni anti-interferenza, può funzionare stabilmente in ambienti elettromagnetici complessi e non è suscettibile alle interferenze di altri dispositivi elettronici.
Nelle applicazioni con i droni, M9N può essere utilizzato nei seguenti aspetti:
Posizionamento e navigazione: l'M9N fornisce informazioni precise sulla posizione e sulla velocità per aiutare i droni a ottenere una navigazione e un controllo del volo precisi.
Navigazione waypoint: inserendo informazioni waypoint preimpostate in M9N, i velivoli senza pilota possono volare automaticamente in base alla rotta, svolgendo attività di navigazione waypoint autonome.
Collaborazione tra più aeromobili: più droni possono utilizzare il modulo M9N per il posizionamento e la sincronizzazione, per realizzare applicazioni quali il volo collaborativo di squadra e il volo in formazione.
Ritorno al ritorno: l'M9N può fornire informazioni precise sul posizionamento di ritorno, consentendo al drone di tornare in sicurezza al punto di decollo o al punto di ritorno preimpostato.
M9N può cercare più satelliti all'aperto con maggiore precisione, maggiore velocità di ricerca e migliore stabilità. (Il numero specifico di ricerche stellari è determinato dall'ambiente in quel momento.)
Dettagli del Pixhawk PX4 con GPS M9N
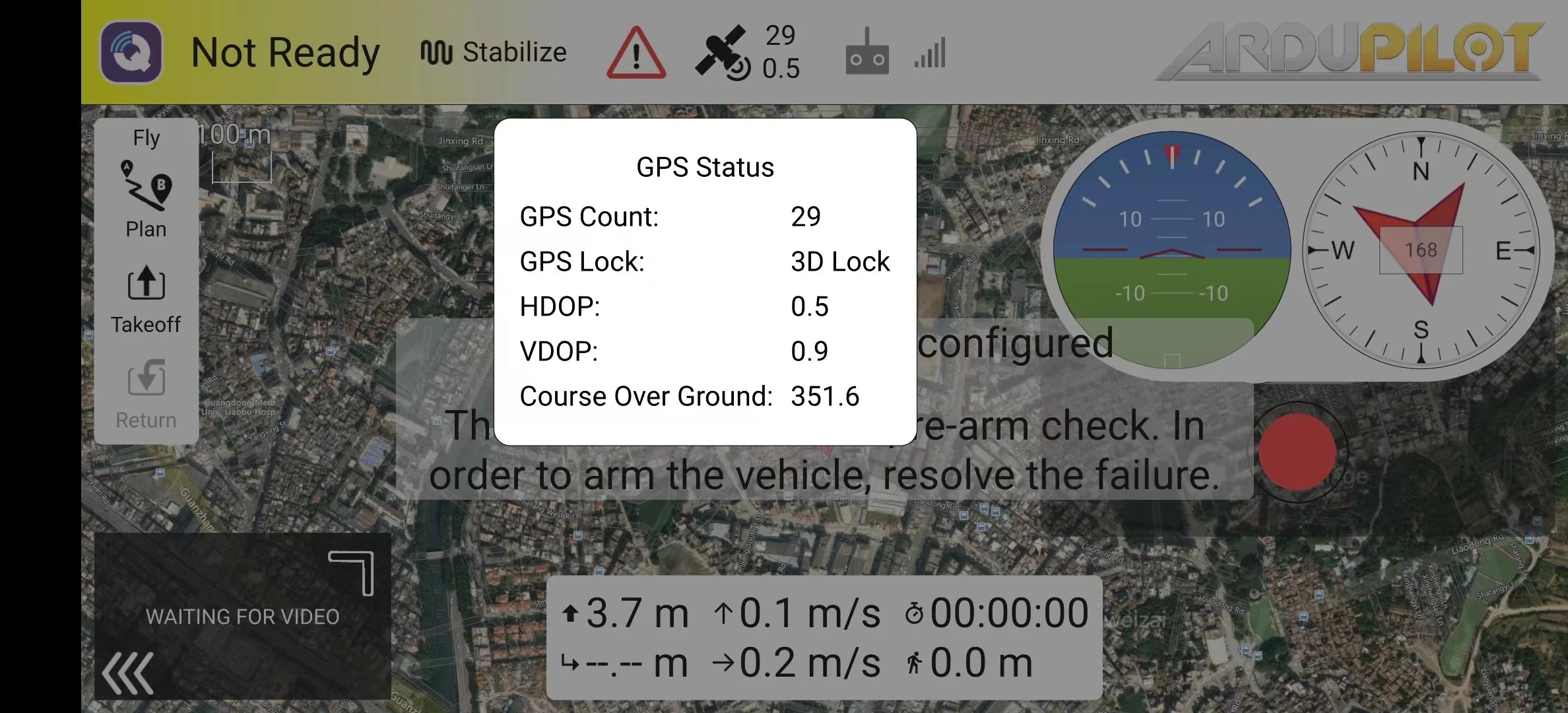
Non pronto per il pilota automatico. Stabilizza 2.5 ARDUINO Fly Road Linxing Road Stato GPS: Shuitangshan, Lr Conteggio GPS: 29/10/10 Piano W-168. Blocco GPS: Blocco 3D 10 gradi. HDOP: 0,5. VDOP al decollo: 0,9. Configurato per la navigazione in Guangdong Mile. Rotta rispetto al suolo: 351,6. Ospedale universitario Liaobu Ritorno alla rotta, controllo: in attesa del video. Mirando ad armare il veicolo, risolvere il guasto.