Pixhawk PX4 PRO PIX Pilota automatico per controllore di volo a 32 bit - con quadricottero RC 4G SD Ardupilot ArduPlane ArduRover
Pixhawk PX4 PRO PIX Pilota automatico per controllore di volo a 32 bit - con quadricottero RC 4G SD Ardupilot ArduPlane ArduRover
RCDrone
Impossibile caricare la disponibilità di ritiro
SPECIFICHE Pixhawk PX4 PRO PIX Controller di volo automatico a 32 bit
Interasse: Piastra inferiore
Usa: Veicoli e giocattoli telecomandati
Aggiornamento parti/accessori: Telaio
Forniture di strumenti: Classe assemblata
Parametri tecnici: KV1100
Taglia: 80*48*15
Periferiche/dispositivi di controllo remoto: Telecomando
Età consigliata: 12+a,14+a
Parti e accessori RC: Componenti motore
Quantità: 1 pezzo
Origine: Cina continentale
Numero modello: PIXHAWK PRO
Materiale: EVA
Attributi trazione integrale: Assemblaggio
Per tipo di veicolo: Aerei
Nome del marchio: rctosky

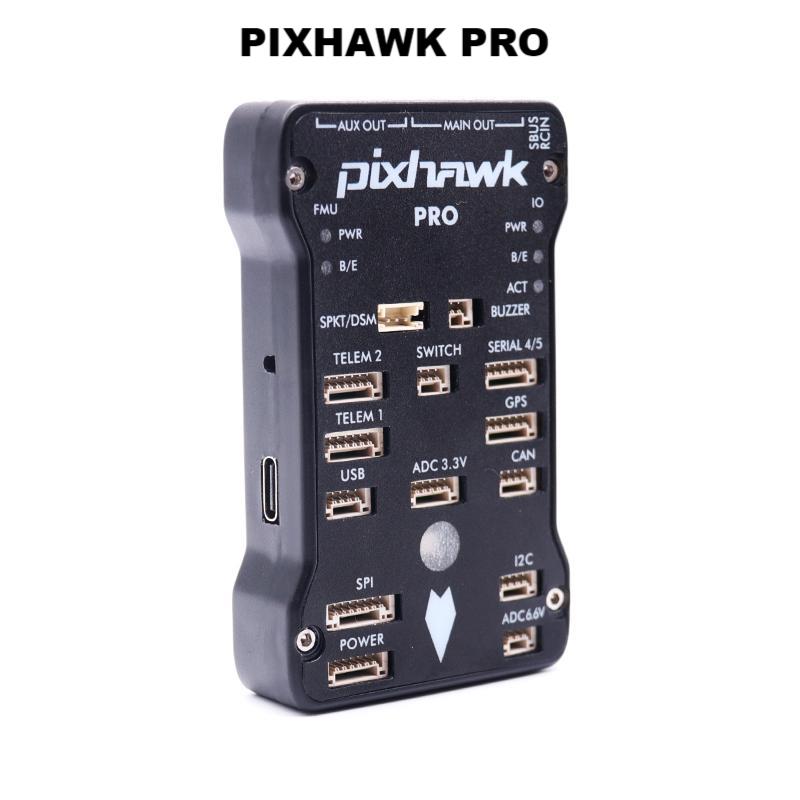
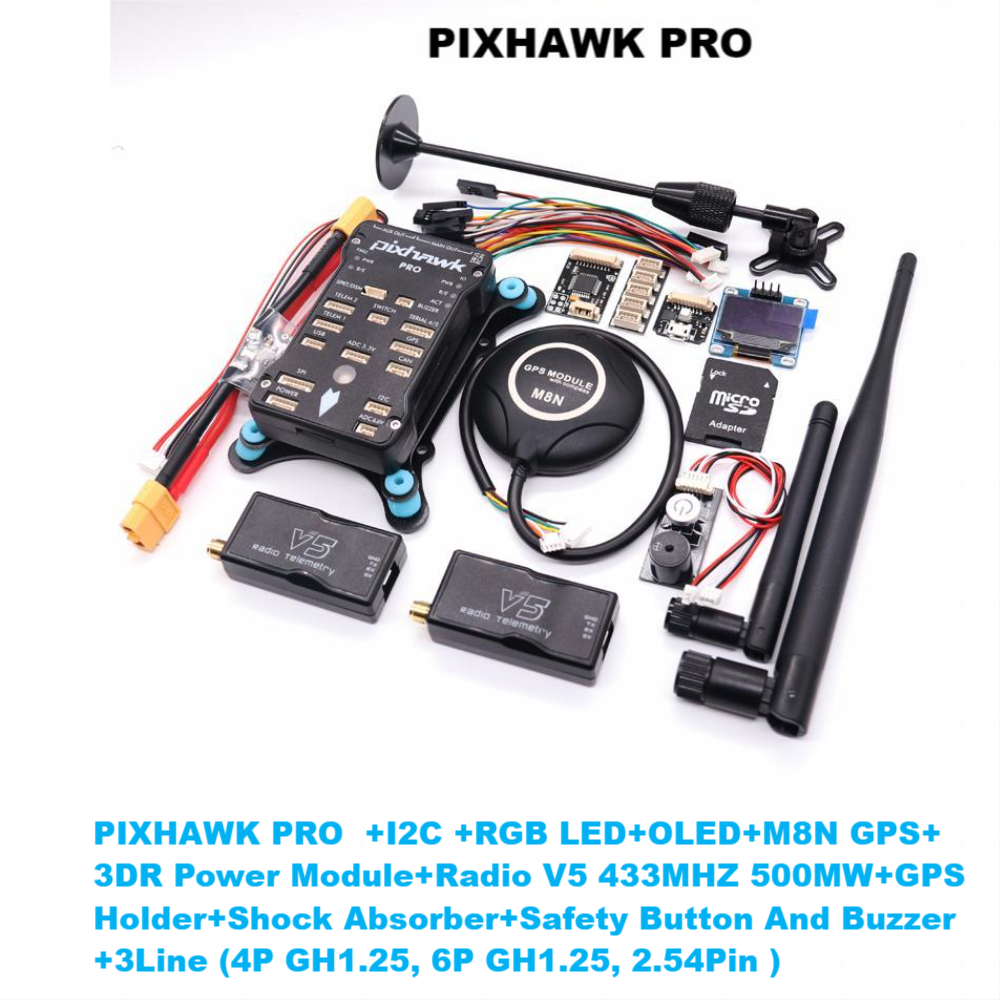
Pixhawk supporta le ultime versioni firmware ArduPilot e PX4, incluse 2.4.8 e PRO. È dotato di una porta GH dedicata con meccanismo di blocco per una connessione più stabile e un'interfaccia USB TYPE-C per comunicazioni affidabili.
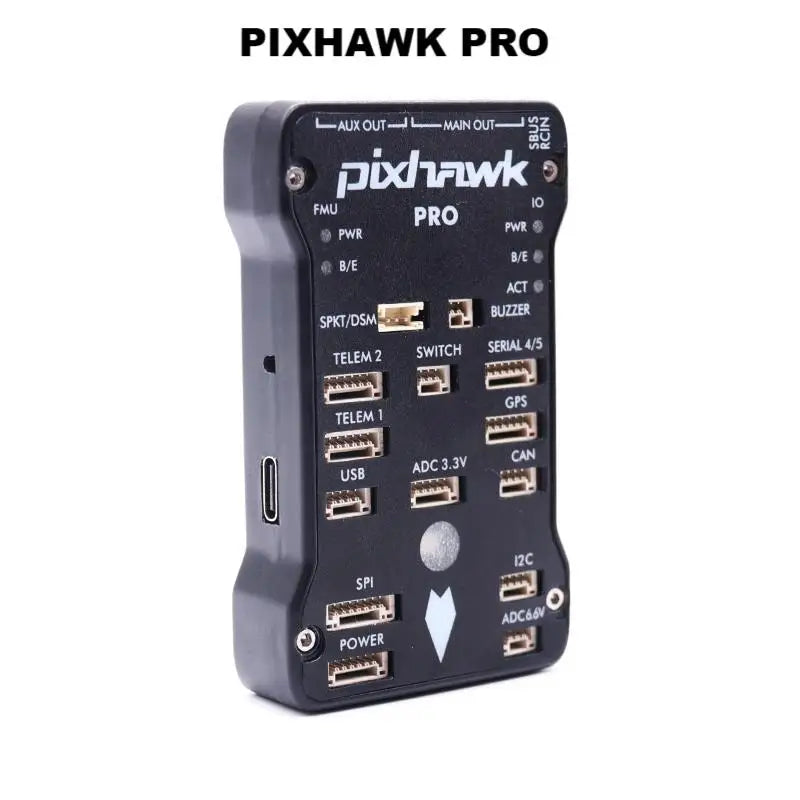



PIXHAWK PRO AUX Out- OUT 32 pixdnuwk FMU PRO PWR FWR BE BTE ACT SPKTDSM BUZZER TELEM Switch Serial4/5 TYPE-C USB TeLEM GPS USB ADC 3 3v CAN SpI 12C POWER AdcG6
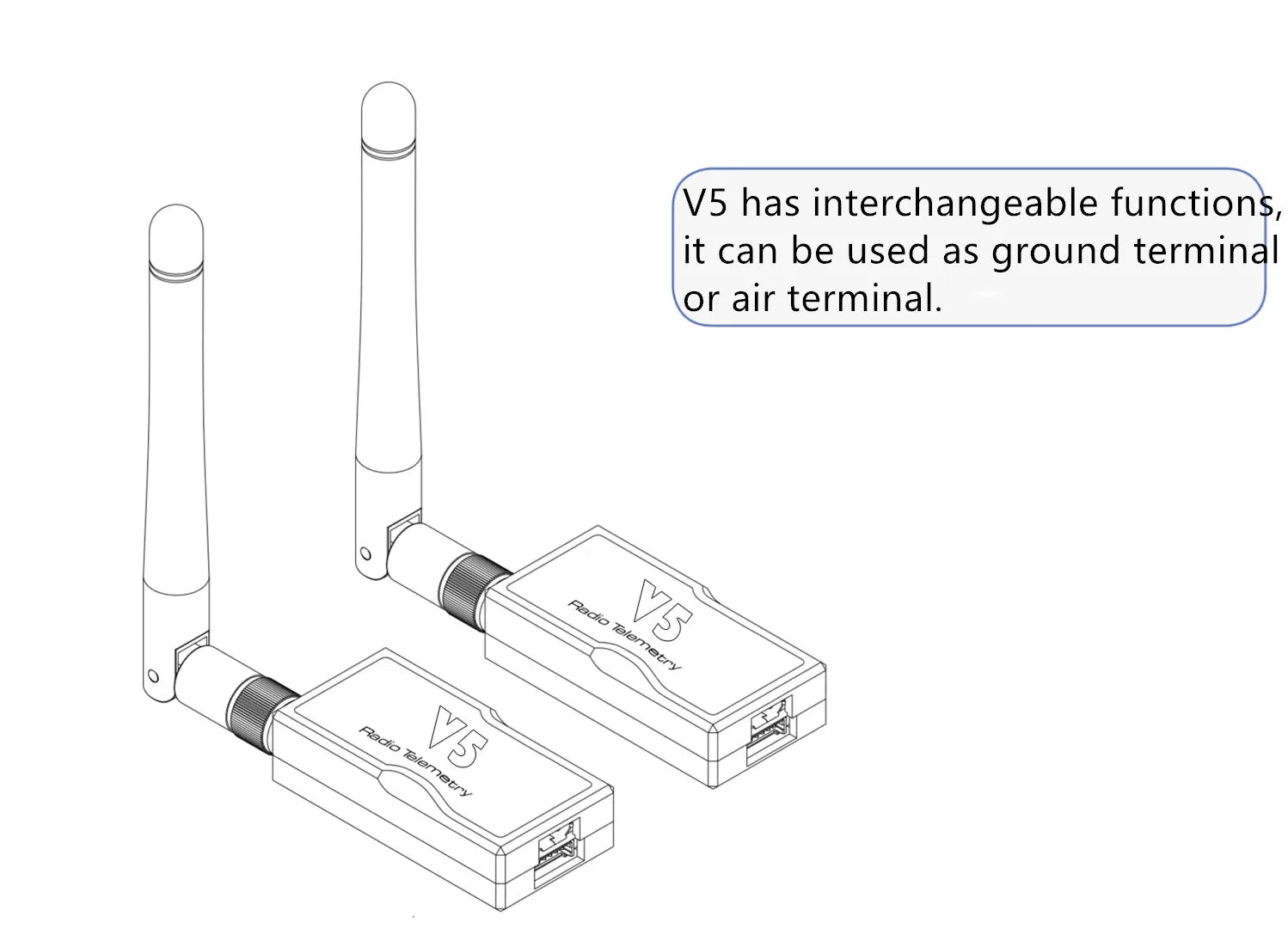
Il controller di volo Pixhawk PX4 PRO ha funzioni intercambiabili, che ne consentono l'utilizzo sia come stazione di terra che come terminale di volo.
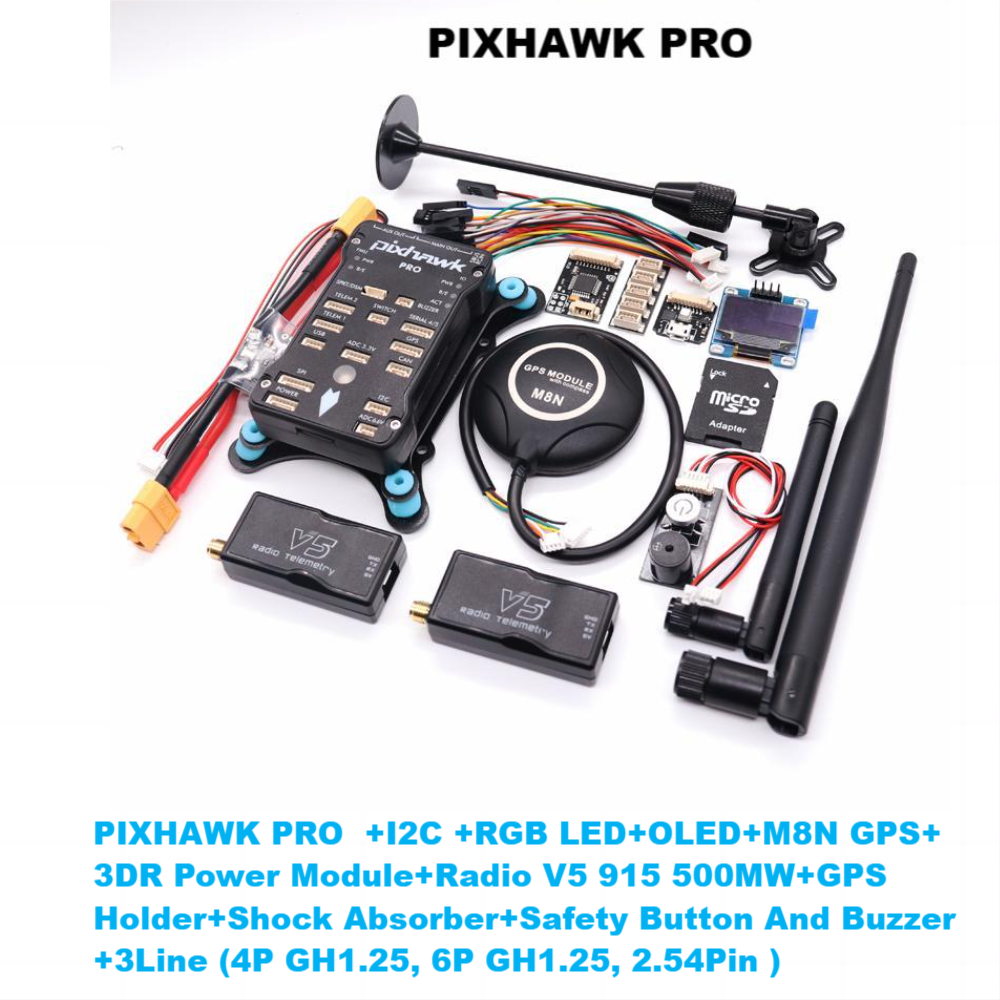
![[4] [1] [2] [3] Radio Talemet](https://rcdrone.top/cdn/shop/files/H8ea99d00a908494db39129dc6647352a5_2f6b2a1e-638a-4d31-9f81-30e9dc1b04c8.webp?v=1714895618)
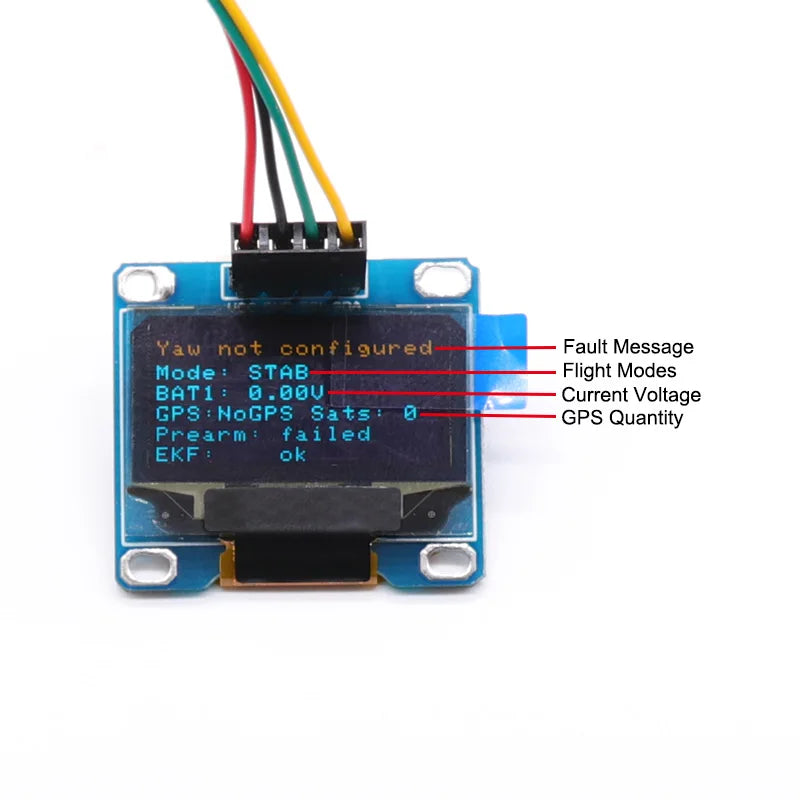
Avviso: non configurato. Modalità messaggio di errore: modalità di volo stabile non disponibile. Livello della batteria: 0% (BAT1). Corrente: 0,00 uA. Voltaggio: sconosciuto. GPS: nessun segnale GPS disponibile. Quantità GPS: sconosciuta. Preinserimento fallito. EKF non inizializzato.
Related Collections