







PIXHAWK2.4.8 Kit telaio in fibra di carbonio 450 per controllo di volo - Ardupilot 100MW Radio Telemetria Quadcopter BLHELI 20A 2212 Motor ESC
PIXHAWK2.4.8 Kit telaio in fibra di carbonio 450 per controllo di volo - Ardupilot 100MW Radio Telemetria Quadcopter BLHELI 20A 2212 Motor ESC
RCDrone
Impossibile caricare la disponibilità di ritiro
SPECIFICHE Kit telaio PIXHAWK2.4.8 Flight Control in fibra di carbonio 450
Usa: Veicoli e giocattoli telecomandati
Età consigliata: 12+a,14+a,6-12a
Origine: Cina continentale
Materiale: Fibra di carbonio
Nome del marchio: rctosky
Pixhawk 2.4.8 supporta l'ultimo firmware ufficiale Ardupilot e il firmware PX4.
1. Gli avanzati processori ARM CortexM4 a 32 bit ad alte prestazioni (flash da 2 MB) possono eseguire il sistema operativo in tempo reale NuttX RTOS;
2. 14 uscite PWM/servo;
3. Interfaccia bus (UART, I2C, SPI, CAN);
4. L'alimentazione di backup integrata e il controller di backup si guastano, il controller primario esegue il failover sul controllo di backup è sicuro;
5. Fornire modalità automatica e manuale;
6. Fornire ingresso di alimentazione e failover ridondanti;
7. Luci LED multicolori;
8. Fornire un'interfaccia cicalino multitono
9. Registrazione dati di volo su Micro SD;
Specifiche:
Interfaccia
1,5 UART compatibile ad alta tensione 1, 2 con controllo di flusso hardware
2. 2 PUÒ
Ingresso compatibile con ricevitore satellitare 3.Spektrum DSM / DSM2 / DSM-X
4.Ingressi e uscite compatibili con Futaba SBUS
Ingresso segnale 5.PPM
6.Ingresso RSSI (PWM o tensione)
7.I2C
8.SPI
Ingresso 9.3.3 e 6,6VAC
10. Interfaccia MICRO USB esterna
Collocazione semplice:
F450+4 PZ BLHELI 30A +4 coppie 1045 Eliche +4 PZ 2212 motore 920KV
Pacchetto semplice:
F450+4 PZ BLHELI 30A +4 coppie 1045 Eliche +4 PZ 2212 Motore 920KV
Pacchetto standard:
F450+4 PZ BLHELI 30A +4 coppie 1045 Eliche +4 PZ 2212 motore 920KV
PIXHAWK 2.4.8(shell bianco o nero)+ scheda TF 4G + pulsante di sicurezza + cicalino + codificatore PPM + scheda di espansione I2C+ 3 linee (4 pin 1.25, 6 pin 1.25, 3 pin 2.5.4)
Pacchetto alto:
F450+4 PZ BLHELI 30A +4 coppie 1045 Eliche +4 PZ 2212 motore 920KV
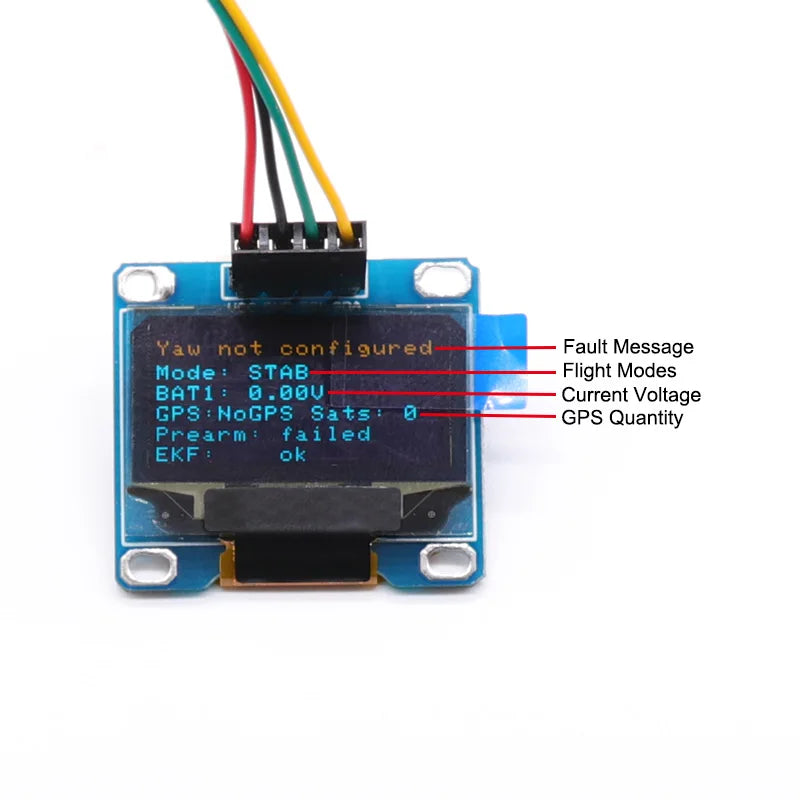
PIXHAWK 2.4.8(shell bianco o nero)+ scheda TF 4G + pulsante di sicurezza + cicalino + codificatore PPM + scheda di espansione I2C+ LED RGB + schermo OLED+ 3 linee (4 pin 1,25, 6 pin 1.25 ,3Pin 2.5.4)
433MHZ 100MW A :
F450+4 PCS BLHELI 30A +4 pairs 1045 Propellers +4 PCS 2212 920KV motore
PIXHAWK 2.4.Scheda TF 8+ 4G + pulsante di sicurezza + cicalino + codificatore PPM + scheda di espansione I2C+ 3 linee (4 pin 1.25, 6 pin 1.25, 3 pin 2.5.4) + GPS M8N+ supporto GPS+ modulo di alimentazione 3DR+ ammortizzatore+radiotelemetria 433MHZ 100MW
433MHZ 500MW B:
F450+4 PCS BLHELI 30A +4 pairs 1045 Propellers +4 PCS 2212 920KV motore
PIXHAWK 2.4.8(shell bianco o nero)+ scheda TF 4G + pulsante di sicurezza + cicalino + codificatore PPM + scheda di espansione I2C+ LED RGB + schermo OLED+ 3 linee (4 pin 1.25, 6 pin 1.25, 3 pin 2.5.4 ) + GPS M8N+ Supporto GPS+ Modulo di alimentazione 3DR+Ammortizzatore+Radiotelemetria 433MHZ 500MW
433MHZ 1000MW C:
F450+4 PCS BLHELI 30A +4 pairs 1045 Propellers +4 PCS 2212 920KV motore
PIXHAWK 2.4.8(shell bianco o nero)+ scheda TF 4G + pulsante di sicurezza + cicalino + codificatore PPM + scheda di espansione I2C+ LED RGB + schermo OLED+ 3 linee (4 pin 1.25, 6 pin 1.25, 3 pin 2.5.4 ) + GPS M8N+ Supporto GPS+ Modulo di alimentazione 3DR+Ammortizzatore+Radiotelemetria 433MHZ 1000MW
915MHZ 100MW A:F450+4 PZ BLHELI 30A +4 coppie 1045 Eliche +4 PZ 2212 920KV motore
PIXHAWK 2.4.8+ Scheda TF 4G + Pulsante di sicurezza + Cicalino + Encoder PPM + Scheda di espansione I2C+ 3 linee (4 pin 1.25, 6 pin 1.25, 3 pin 2.5.4) + GPS M8N+ Supporto GPS+ Modulo di alimentazione 3DR+ Ammortizzatore +915MHZ 100MW Radiotelemetria
915MHZ 500MW B:
F450+4 PCS BLHELI 30A +4 pairs 1045 Propellers +4 PCS 2212 920KV motore
PIXHAWK 2.4.8(shell bianco o nero)+ scheda TF 4G + pulsante di sicurezza + cicalino + codificatore PPM + scheda di espansione I2C+ LED RGB + schermo OLED+ 3 linee (4 pin 1.25, 6 pin 1.25, 3 pin 2.5.4 ) + GPS M8N+ Supporto GPS+ Modulo di alimentazione 3DR+Ammortizzatore+Radiotelemetria 915MHZ 500MW
433MHZ 1000MW:
F450+4 PCS BLHELI 30A +4 pairs 1045 Propellers +4 PCS 2212 920KV motore
PIXHAWK 2.4.8(guscio bianco o nero)+ scheda TF 4G + pulsante di sicurezza + cicalino + codificatore PPM + scheda di espansione I2C+ LED RGB + schermo OLED+ 3 linee (4 pin 1.25, 6 pin 1.25, 3 pin 2.5.4 ) + GPS M8N+ Supporto GPS+ Modulo di alimentazione 3DR+Ammortizzatore+Radiotelemetria 433MHZ V5 1000MW
OSD 433MHZV5 1000MW:
F450+4 PCS BLHELI 30A +4 pairs 1045 Propellers +4 PCS 2212 920KV motore
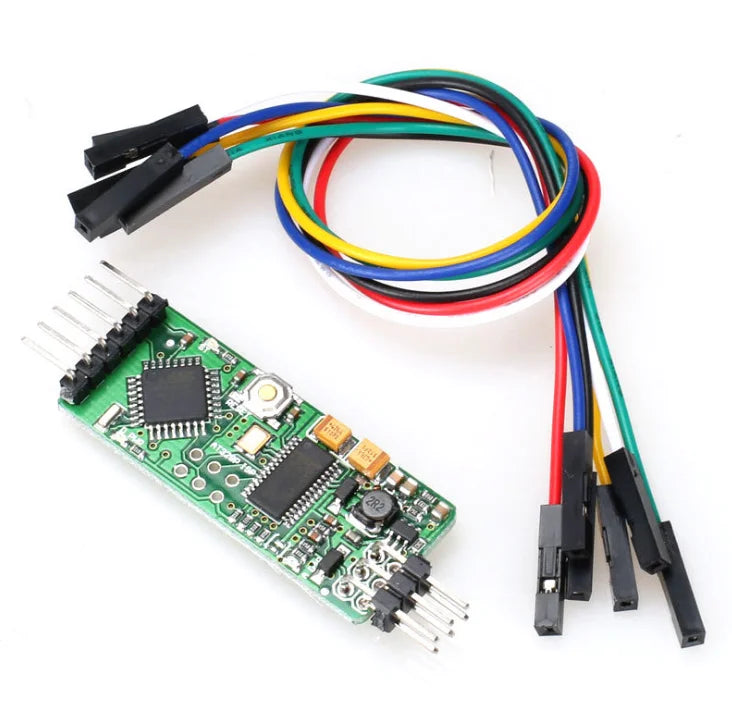
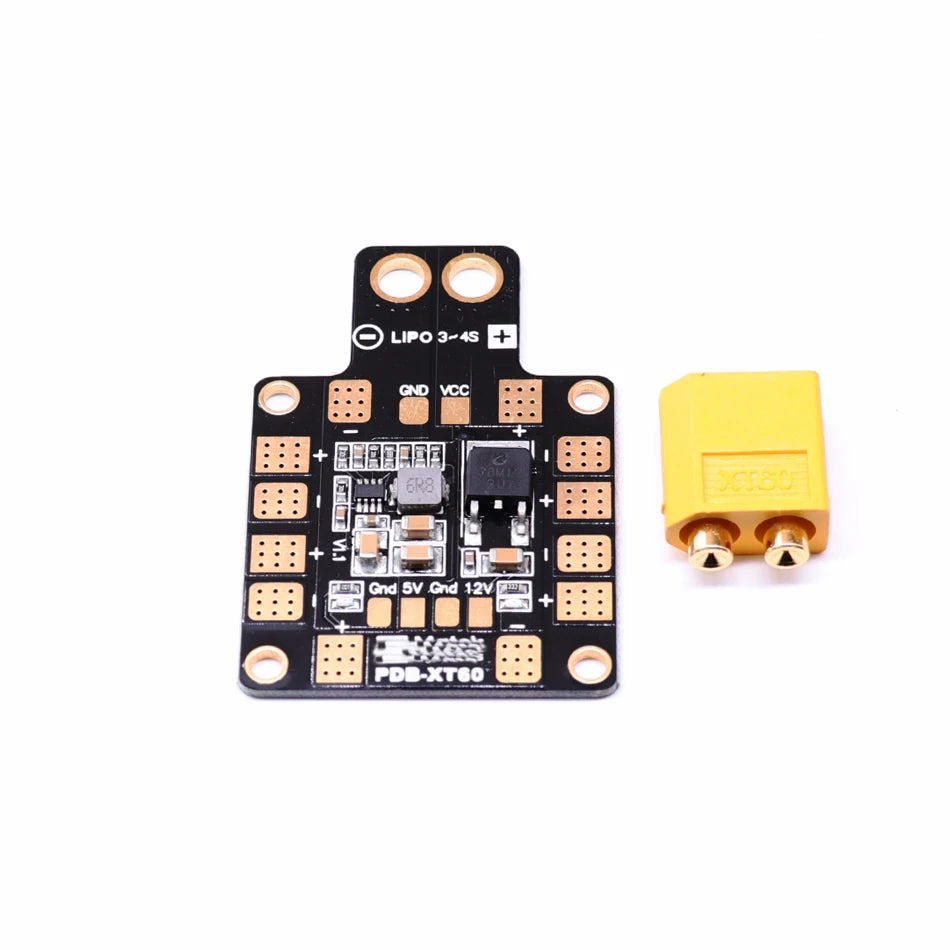
PIXHAWK 2.4.8(shell bianco o nero)+ scheda TF 4G + pulsante di sicurezza + cicalino + codificatore PPM + scheda di espansione I2C+ LED RGB + schermo OLED+ 3 linee (4 pin 1.25 ,6 pin 1.25 ,3 pin 2.5.4) + GPS M8N+ Supporto GPS+ Modulo di alimentazione 3DR+Ammortizzatore+Telemetria radio 433MHZ V5 1000MW+MINI OSD +PDB
Pacchetto TOP:
F450+4 PZ BLHELI 30A +4 paia sautobloccante< T35411> 1045 eliche +4 PC 2212



A.Caratteristiche
A1: utilizzare componenti elettronici autentici per garantire un'alta qualità e migliorare l'attuale capacità di resistenza dell'ESC.
A2: Basato sul firmware BLHeli, ottimizzato per prestazioni elevate con grande linearità e risposta dell'acceleratore molto più rapida.
A3: progettato appositamente per multirotori e compatibile con velivoli ad ala fissa ed elicotteri.
A4: Molteplici funzioni di protezione tra cui protezione da interruzione per bassa tensione/protezione da surriscaldamento/protezione da perdita di segnale dell'acceleratore.
A5: La gamma dell'acceleratore può essere configurata ed è completamente compatibile con tutti i ricevitori, fornendo una risposta dell'acceleratore fluida, lineare e precisa. R6: Tutti i parametri possono essere programmati utilizzando un trasmettitore, comprese le impostazioni predefinite.
B. Specifiche del prodotto
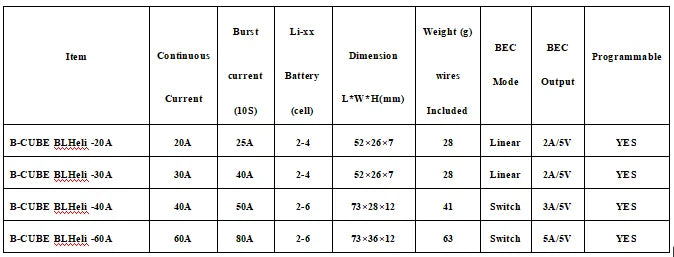
BEC BEC Treni Cobnbuou: DileD D Currebt programmabile Batfert Vir e : Mode Output Currenr LtutHoinil (105) Iocluded B-CCBE BLHeli -20A 026 27 LineAr 4T"

1045 Eliche

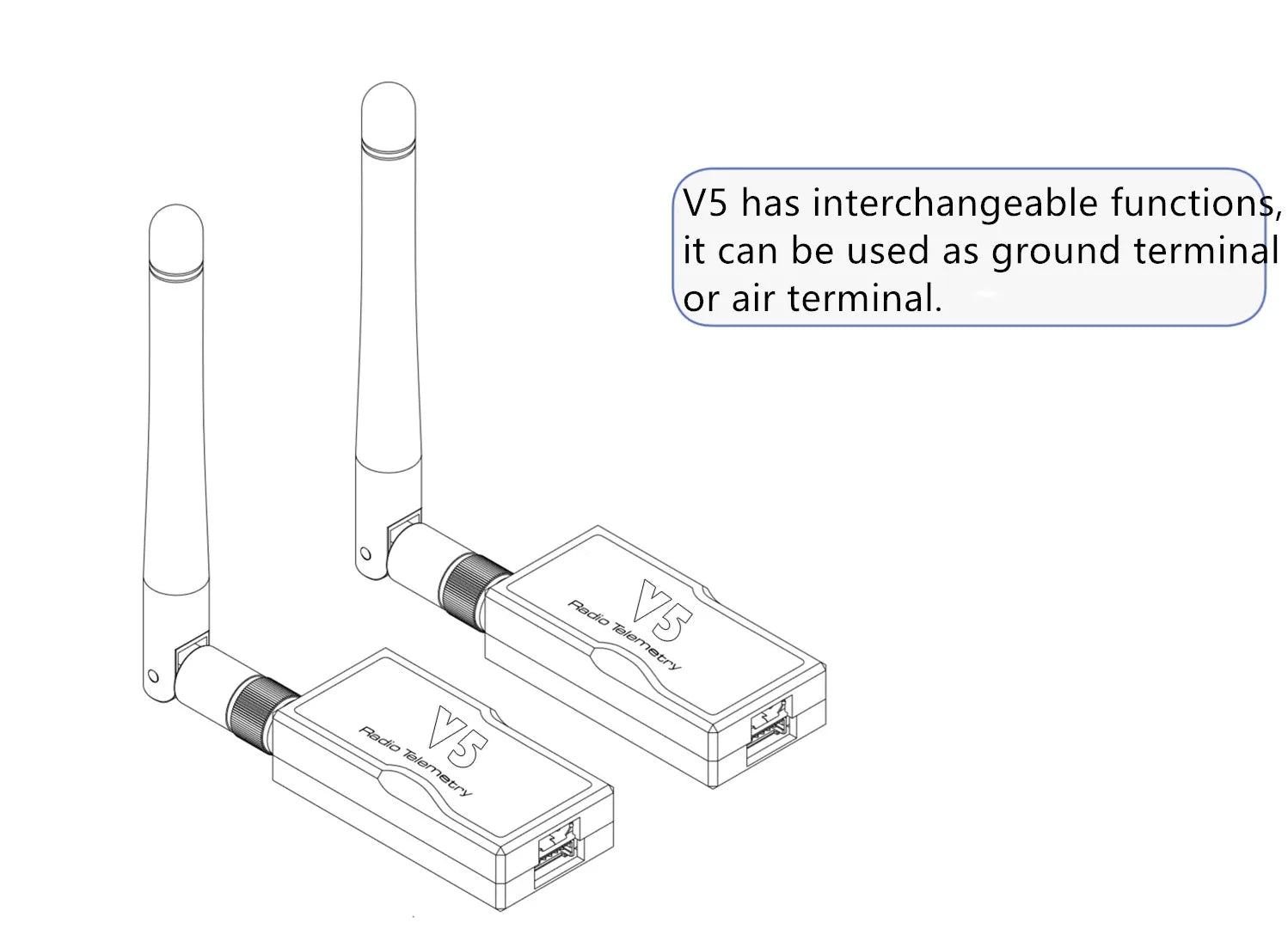
Il modulo V5 presenta funzionalità intercambiabili che gli consentono di fungere sia da stazione di terra che da terminale aereo.
![[4] [1] [2] [3] Radio Talemet](https://rcdrone.top/cdn/shop/files/H8ea99d00a908494db39129dc6647352a5_286b8762-ba49-44db-a8cd-b38c172bd03c.webp?v=1714895788)


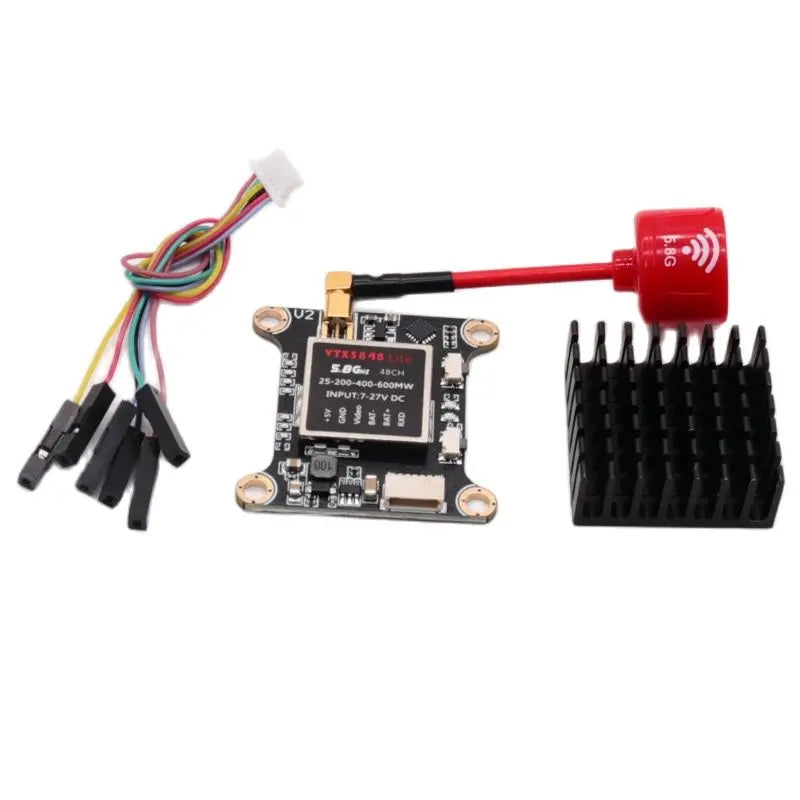
VTX5848 è un trasmettitore video, supporta 25MW-600MW, 48 canali (con dissipatore di calore e 3DBantenna)
Fotocamera FPV

Questo articolo spiega come collegare gli ESC, i motori e le eliche a un pilota automatico.Il Pixhawk viene utilizzato come esempio, ma altri autopiloti sono collegati in modo simile.
Collegare i cavi di alimentazione (+), terra (-) e segnale/i per ciascun ESC ai pin di uscita principali dell'autopilota in base al numero del motore. Trova il tipo di frame di seguito per determinare l'ordine assegnato ai motori.

Pin di uscita Pixhawk (numerati). I primi 4 pin sono codificati a colori per il collegamento di un Quadframe
Schemi ordine motore
I diagrammi seguenti mostrano l'ordine dei motori per ciascun tipo di telaio. I numeri indicano quale pin di uscita dell'autopilota deve essere collegato a ciascun motore/elica. La direzione dell'elica è mostrata in verde (in senso orario, CW) o blu (in senso antiorario, CCW)

Legenda per i diagrammi ordine motore
Quadricottero

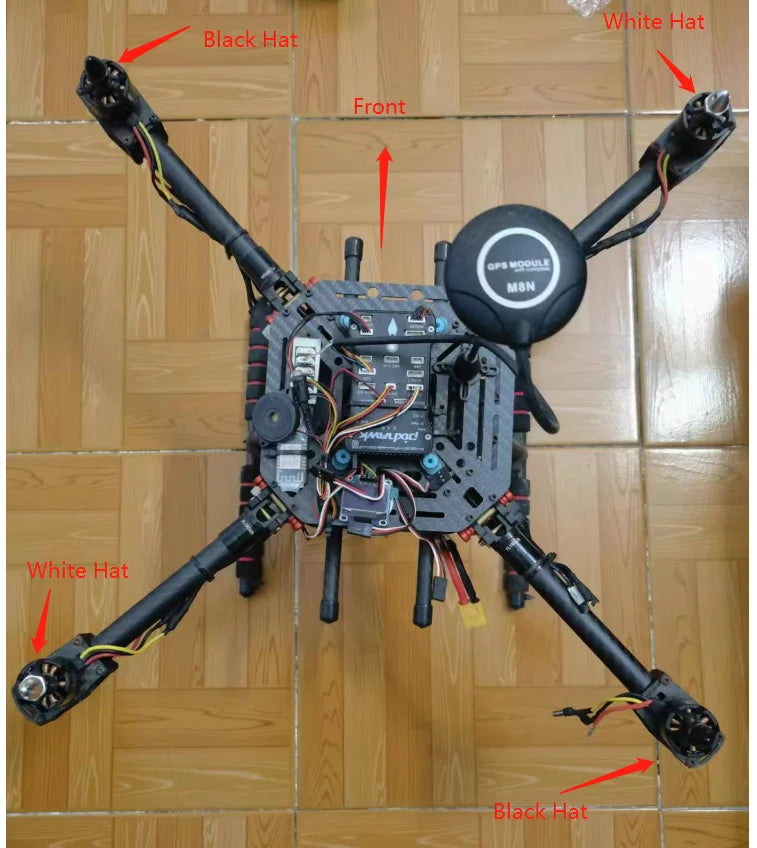
Riconoscimento delle eliche in senso orario e antiorario

I diagrammi sopra mostrano due tipi di eliche: in senso orario (chiamate spingitori) e in senso antiorario (chiamate estrattori). Il metodo più affidabile per riconoscere il tipo di elica corretto dalla sua forma, come mostrato di seguito. Il bordo più spesso è il bordo anteriore che si muove nella direzione di rotazione. Il bordo d'uscita è smerlato in modo più radicale e solitamente più sottile.
Come installare il motore?
Related Collections






















