







Kit drone da corse FPV QAV250 da 250 mm con motori da 2205 2300kv, controller di volo F4, Littlebee 30A BLHELI_S ESC e fotocamera 1200TVL
Kit drone da corse FPV QAV250 da 250 mm con motori da 2205 2300kv, controller di volo F4, Littlebee 30A BLHELI_S ESC e fotocamera 1200TVL
RCDrone
Impossibile caricare la disponibilità di ritiro

Il pacchetto include:
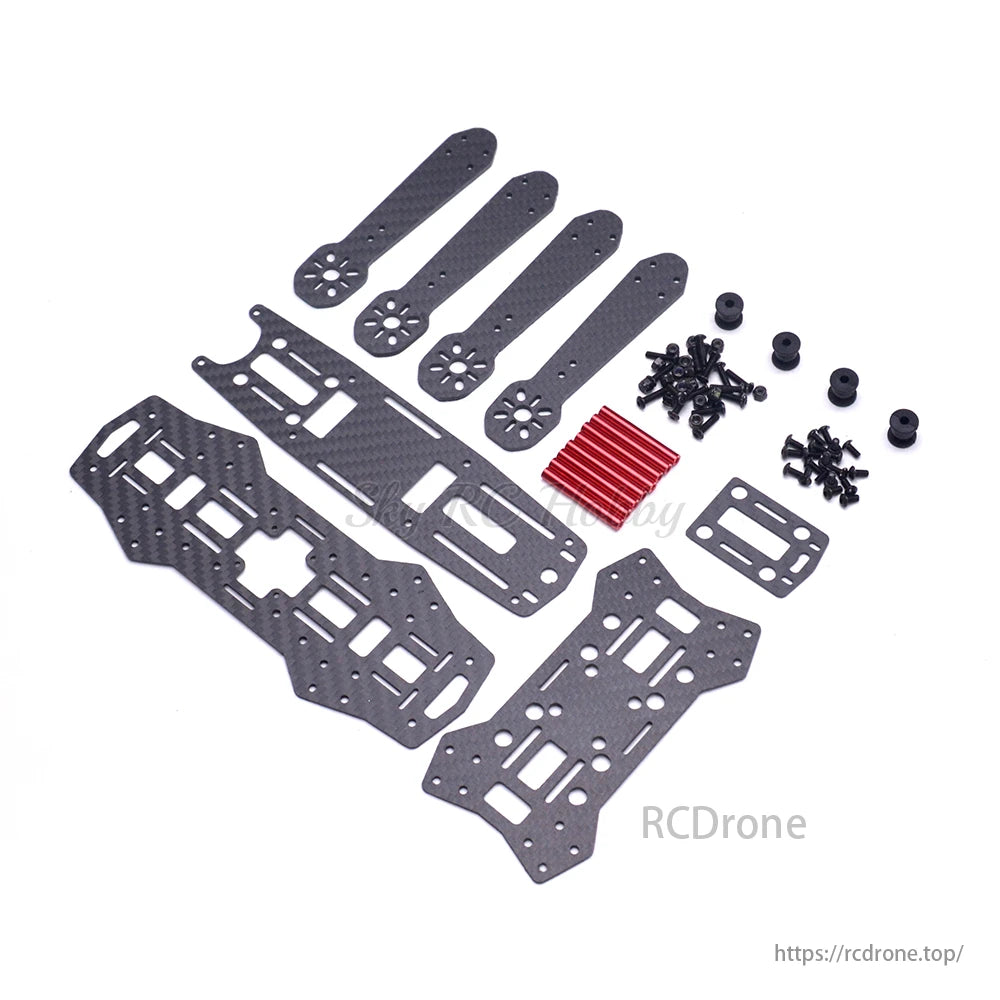
1 x kit telaio in fibra di carbonio ZMR250
4 motori RS2205 2300kv
4 regolatori di velocità Littlebee da 30 A (Nota: sono disponibili due tipi di Littlebee 30A ESC, ne spediremo uno casuale.)
1 x F3 Acro / F4 V3S / F405 Plus Controllore di volo (Invialo come preferisci)
1 x scheda di distribuzione di potenza
1 telecamera 1200TVL
4 eliche 5045
1 x UBEC
1 x cinghia per batteria
Kit telaio in fibra di carbonio QAV250 da 250 mm:
Specifiche:
- Materiale principale: fibra di carbonio completa
- Con ammortizzatore in gomma per ridurre le vibrazioni durante il volo
- Distanziale in lega di alluminio, leggero, affidabile
- Interasse: 250mm
- Peso: 136 g±2

Controllore di volo F3 ACRO:
Caratteristiche
• Nessun compromesso I/O. Utilizza tutte le funzionalità in ogni momento; ad esempio, collega OSD + SmartPort + SBus + GPS + LED Striscia + Monitoraggio batteria + Sonar + 8 motori, tutto contemporaneamente!
• Registratore di volo con scatola nera ad alta capacità integrato: ottimizza la tua messa a punto e visualizza i risultati della tua configurazione senza congetture (Deluxe).
• Processore STM32 F3 di nuova generazione con unità hardware a virgola mobile per calcoli di volo efficienti e più veloci
Core ARM-Cortex M4.
• Design impilabile: perfetto per l'integrazione con OSD e schede di distribuzione dell'alimentazione.
• 16 linee I/O PWM per ESC, servi e ricevitori legacy. 8 disponibili su connettori pin standard. 8 tramite lato connettori montati.
• Supporto completo per ESC OneShot per una facile messa a punto PID e una risposta più nitida.
• Supporta i ricevitori SBus, SumH, SumD, Spektrum1024/2048, XBus, PPM e PWM. Non sono necessari inverter esterni. (integrato).
• Uscita dedicata per LED programmabili: ideale per l'orientamento, le gare e il volo notturno.
• Porta I2C dedicata per la connessione del display OLED senza bisogno della batteria di volo.
• Porte di monitoraggio della batteria per tensione e corrente.
• Supporto sonar per un mantenimento preciso a bassa quota.
• Porta buzzer per avvisi e notifiche acustici.
• Porta di debug (SWD) intuitiva per gli sviluppatori e selezione della modalità di avvio, bootloader non brickabile.
• Design simmetrico per un cablaggio super ordinato.
• Cablare utilizzando connettori a pin, zoccoli JST-SH o piazzole di saldatura. Utilizzare connettori a pin ad angolo retto o dritti.
• Barometro montato sul fondo della tavola per un facile isolamento dal vento.
• Tempi di ciclo fino a circa 2 volte più veloci rispetto alle schede basate su STM32F1 della generazione precedente.
• Configurazione del controllore di volo tramite un'interfaccia grafica multipiattaforma (Windows/OSX/Linux).
• Supporta una vasta gamma di aeromobili, tricotteri, quadricotteri, esacotteri, ottocotteri, aerei e altro ancora.
Software
SPRacingF3 utilizza il software di controllo del volo (FC) open source Cleanflight, che ha una comunità in continua crescita di sviluppatori e utenti amichevoli. Essere open source significa che anche tu puoi contribuire al sistema.
Cleanflight viene fornito con un manuale dettagliato che viene rivisto e mantenuto dagli sviluppatori di Cleanflight e comunità. Niente più pagine wiki obsolete e informazioni di seconda mano.
Assicurati di fare riferimento al manuale appropriato alla versione del firmware in uso.
Storia
L'hardware è stato progettato dallo sviluppatore principale di Cleanflight, Dominic Clifton, per essere più capace dell' Schede basate su STM32F1 dopo aver ascoltato il feedback degli utenti, dei collaboratori e dei piloti di alto livello di Cleanflight.
La mancata osservanza di queste avvertenze invaliderà la garanzia e distruggerà il tuo volo controllore.
• Rispettare SEMPRE la polarità. Controllare e CONTROLLARE ANCORA una volta prima di alimentare il dispositivo.
• SPEGNERE prima di scollegare, collegare o effettuare qualsiasi collegamento.
• Collegare solo una FONTE di alimentazione ai pin VCC / Non collegare più di una fonte di alimentazione per due o più pin VCC, ad esempio se si utilizzano ESC con i BEC, rimuovere il filo ROSSO centrale da tutti i connettori ESC tranne uno.
• Non collegare tra loro GND, VCC o 3,3 V (cortocircuito).
• Non collegare GND, VCC o 3,3 V ad alcun ingresso o uscita, salvo diversa indicazione.
• Non collegare alcun ingresso o uscita ad alcun altro ingresso o uscita a meno che non sia specificato diversamente
ha affermato.
• L'alimentazione a 3,3 V è solo per uso a bassa corrente. 100 mA MAX.
• Non far entrare sporcizia/polvere/colla/ecc. nel sensore di pressione (barometro).
• Tenere i magneti lontani dal flight controller.
AVVERTENZE
CONSIGLI GENERALI
Per ottenere le migliori prestazioni e una lunga durata del tuo flight controller, segui i consigli riportati di seguito:
• Applicare resina/colla per rinforzare i connettori JST-SH: utile in caso di incidente con l'aereo.
• Si consiglia di utilizzare un contenitore/scatola per il controllore di volo.
• Installare schiuma a celle aperte sotto il sensore di pressione - inserirne un po' tra il FC e cornice.
• Far passare i cavi del motore/batteria il più lontano possibile dal sensore della bussola (magnetometro) il più possibile.
• Installare i pin jumper BOOT solo se necessari.
• Si consiglia l'uso di connettori pin con codice colore (non forniti), in particolare per VBAT intestazioni.
• Fare tutto il possibile per evitare che le vibrazioni raggiungano il sensore dell'accelerometro/giroscopio.
Specifiche:
* Scheda 36x36mm con fori di montaggio da 30,5mm.
* Processore STM32F3.
* Accelerometro/giroscopio MPU6050
* Presa MicroUSB.
* 4 prese JST-SH a 4 pin (I2C, SWD, 2xUART)
* 2 prese JST-SH a 8 pin (PPM, PWM, SERIAL RX, GPIO, ADC, 3 V, 5 V, GND)
* 8 fori passanti a 3 pin per connettori pin per connessioni ESC/Servo.
* 2 fori passanti a 4 pin per connettori pin per 2 porte seriali.
* 2 fori passanti a 2 pin per connettori pin per la tensione della batteria e il cicalino.


Specifiche del controllore di volo F4 V3S Plus:
Firmware: OMNIBUSF4SD
Dimensioni: 36x36mm
Fori di montaggio: 30,5x30,5 mm
Microcontrollore STM32 F405
Supporto Dshot
OSD drag-and-drop configurato tramite Betaflight
Unità di misura: MPU6500 / MPU6000 (Invia a caso)
Porte SBUS / PPM e Speaker DSMX
Scatola nera per schede MicroSD
Baro (BMP280)
5v3a 9V3A BEC
Filtri video integrati (solo 5 V per VTX e telecamera)
Dotato di un processore F4, OSD Betaflight integrato, MicroSD Black Box, 5v3a sbec, filtro video, sintonizzerai i pid con il tuo trasmettitore e
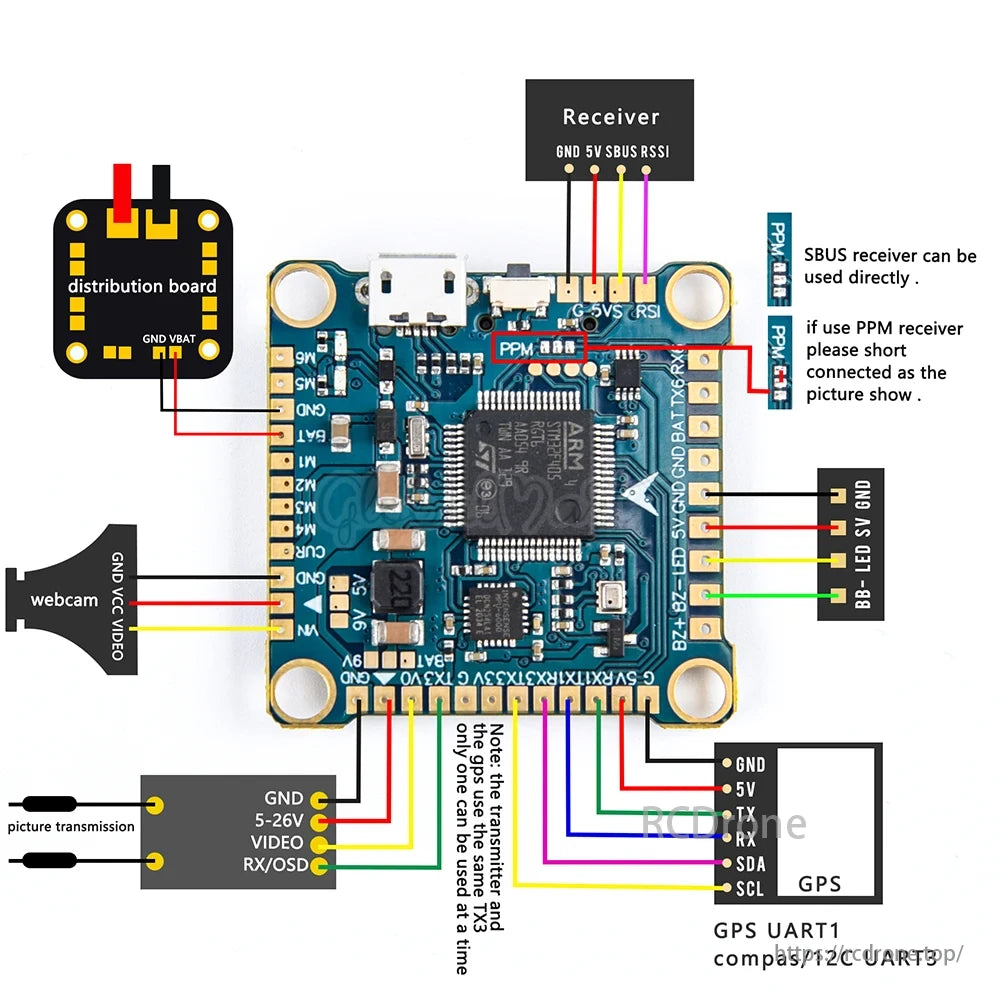
Schema elettrico del drone FPV QAV250. Collega la scheda di distribuzione, la webcam, la trasmissione delle immagini, il ricevitore (SBUS/PPM) e il GPS. Evidenzia UART1 per GPS e UART3 per bussola/I2C.

Controller di volo F4 V3S Plus per drone FPV QAV250. Dotato di porta USB, connettori multipli e pin etichettati per una facile integrazione e controllo.
Parametri del prodotto:
Microcontrollore: STM32F405RGT6 168 MHz
Giroscopio: Mpu6500
Baro:Bmp280
OSD: Betaflight SPI OSD DJI HD OSD (UART5)
Scatola nera: 16 MB
6x Uart: UART 1/2/3/4/5/6
4 uscite PWM
1x I2C
2 LED per lo STATO FC (blu) e indicatore 3,3 V (rosso) e indicatore 5 V (rosso) e indicatore 9 V (rosso)
USB di tipo C (USB 2.0)
1 connettore JST-SH1.0_8 pin (Gnd/Vbat/S1/S2/S3/S4/Curr/Rx3)
1 connettore JST-SH1.0_6 pin (9V/GND/T5/R5/GND/R2)
Potenza filtrata VTX 9V
DJI FPV OSD è supportato da qualsiasi UART di riserva
LED: 4 pad LED indipendenti, supportano l'uscita della lampada di programmazione WS2812.
Ricevitore: supporta i ricevitori Sbus, crsf, ibus, SBUS, XBUS,
L'ingresso predefinito del ricevitore è UART2 (è possibile saldare ELRS RX su UART2).
Potenza: Tensione di ingresso: 3-6S
BEC: BEC a doppio canale 5V/10V 3A max supporta un'alimentazione stabile sul lato cielo del DJI
LDO 3,3 V: Max. 1 A
Firmware FC: Firmware BetaFlight: DAKEFPVF405
Firmware INAV: DAKEFPVF405
Montaggio:
Dimensioni di installazione: 30,5 mm × 30,5 mm Il foro di installazione è M4 e supporta l'installazione della colonna antiurto
Dimensioni esterne 36 mm × 36 mm
Peso del controllo di volo: 6,9 g
Sensore di tensione di bordo per il controllo di volo.



Motore RS2205 2300kv:
Nota: a causa dei diversi lotti di produzione, ci sono due tipi di progettazione del motore, invieremo il motore in modo casuale.

Quattro motori per droni QAV250 FPV di Ready Tosky, caratterizzati da un design nero e rosso con cablaggio visibile per l'assemblaggio del drone.

Nota: sono disponibili due tipi di Littlebee 30A ESC, ne spediremo uno casuale.

Quattro ESC OPTO LITTLEBEE 30A-S BLHeli_S preferiti supportano batterie LiPo da 2 a 6S. Presentano un design compatto con connettori placcati in oro. I fili neri e arancioni indicano i collegamenti di alimentazione. Questi regolatori elettronici di velocità regolano la velocità del motore nei droni FPV, come il QAV250, garantendo un controllo preciso e prestazioni efficienti. Il loro design elegante e la struttura robusta suggeriscono affidabilità per corse di droni ad alte prestazioni e applicazioni di fotografia aerea. Ideali per gli appassionati che cercano qualità e prestazioni.

ESC BLHeli S preferiti per il drone FPV QAV250. LittleBee-Spring 30A, compatibile con Dshot, supporta batterie LiPo da 2 a 6S. Quattro unità con fili rosso, nero e bianco inclusi. Design compatto per prestazioni efficienti.

ESC LIPO Dshot BLHeli S LittleBee-Spring30A 2-6S preferito con fili rosso, nero e bianco per il drone FPV QAV250.

Related Collections







