RCDrone T5001-10 & TS5001-10 Servo motore brushless articolare 1N.m FOC doppio encoder RS485/CAN 1:10 Attuatore servo ingranaggi robotici
RCDrone T5001-10 & TS5001-10 Servo motore brushless articolare 1N.m FOC doppio encoder RS485/CAN 1:10 Attuatore servo ingranaggi robotici
RCDrone
Impossibile caricare la disponibilità di ritiro
Panoramica
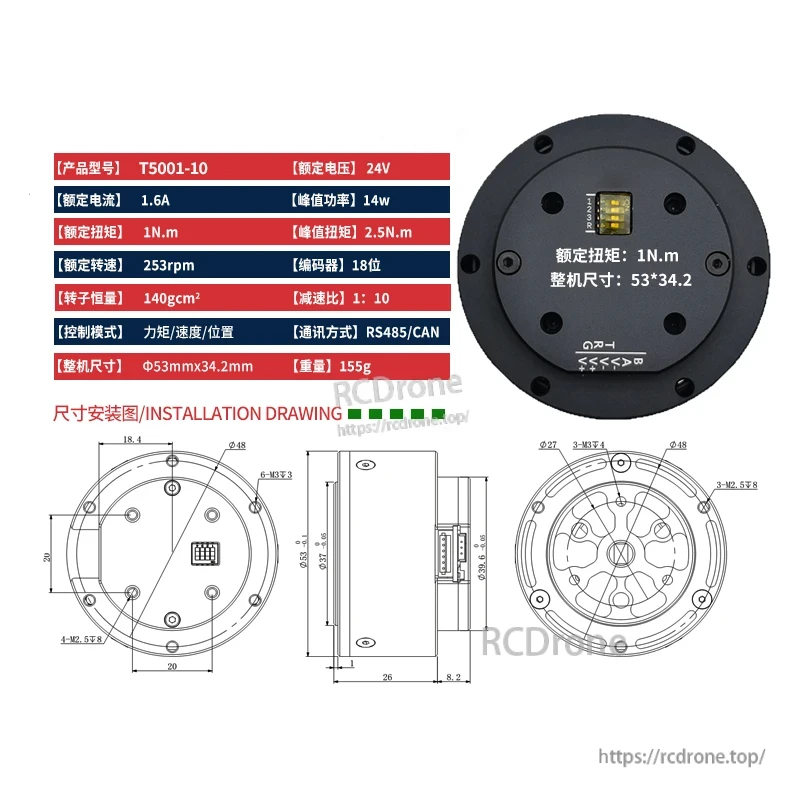
Il RCDrone T5001-10 e il TS5001-10 sono motori a modulo giunto servo brushless ad alte prestazioni e compatti MIT drive progettati per applicazioni robotiche avanzate. Caratterizzati da un torque nominale di 1N·m, torque di picco di 2.5N·m, velocità nominale di 253–255 rpm, e riduzione del rapporto di ingranaggio planetario 1:10, questi moduli servo offrono alta potenza, grande coppia e alta precisione in un fattore di forma leggero. Dotati di un encoder assoluto duale a 18 bit (T5001-10) o 18 bit + 14 bit (TS5001-10), forniscono un feedback di posizione preciso con calibrazione una tantum e impostazione del punto zero. La comunicazione è supportata tramite interfaccia RS485/CAN, garantendo una trasmissione dati affidabile per i sistemi di controllo robotico.
Caratteristiche Principali
-
Feedback ad Alta Precisione – Design con encoder a 18 bit o doppio encoder per un controllo del movimento accurato.
-
Alta Densità di Coppia – Coppia nominale di 1N·m, coppia di picco di 2.5N·m, alloggiamento compatto Φ53mm.
-
Controllo FOC – Controllo Orientato al Campo per un funzionamento fluido ed efficiente.
-
Modalità di Controllo Multiple – Controllo di coppia, velocità e posizione.
-
Comunicazione di Grado Industriale – RS485/CAN con supporto UART per un'integrazione flessibile.
-
Costruzione Durevole – Progettato per la robotica, garantendo stabilità nel funzionamento a lungo termine.
-
Leggero & Compatto – Solo 155g (T5001-10) o 183g (TS5001-10), ideale per design con spazio limitato.
Specifiche Tecniche
| Modello | T5001-10 | TS5001-10 |
|---|---|---|
| Voltaggio Nominale | 24V | 24V |
| Corrente Nominale | 1.6A | 1.6A |
| Potenza di Picco | 14W | 14W |
| Momento Torcentale Nominale | 1N·m | 1N·m |
| Momento Torcentale di Picco | 2.5N·m | 2.5N·m |
| Velocità nominale | 253rpm | 255rpm |
| Encoder | 18-bit assoluto | 18-bit + 14-bit assoluto |
| Inerzia del rotore | 140g·cm² | 140g·cm² |
| Rapporto di trasmissione | 1:10 planetario | 1:10 planetario |
| Modalità di controllo | Momento / Velocità / Posizione | Momento / Velocità / Posizione |
| Comunicazione | RS485 / CAN | RS485 / CAN |
| Dimensioni | Φ53 × 34.2mm | Φ53 × 36mm |
| Peso | 155g | 183g |
Definizione dell'interfaccia
| Punto | Funzione |
|---|---|
| A/H | RS485-A o CAN-H |
| B/L | RS485-B o CAN-L |
| V- | Alimentazione negativa |
| V+ | Alimentazione positiva |
| T | Trasmettitore UART |
| R | Ricevitore UART |
| G | GND segnale |
Applicazioni
-
Robot a zampe – Controllo del movimento stabile per quadrupedi e umanoidi.
-
Robot industriali – Giunti servo ad alta precisione per bracci robotici.
-
Robot da pattugliamento – Unità di trasmissione affidabili per piattaforme mobili autonome.
-
Robot medici – Leggeri e precisi per esoscheletri e dispositivi di riabilitazione.
Dettagli



Related Collections