




ROBOTERA XHAND 1 Mano Robotica - 12 DoF, polpastrelli tattili a 270°, presa 80N, solleva 25 Kg, EtherCAT/RS485, compatibile ROS
ROBOTERA XHAND 1 Mano Robotica - 12 DoF, polpastrelli tattili a 270°, presa 80N, solleva 25 Kg, EtherCAT/RS485, compatibile ROS
ROBOTERA
Impossibile caricare la disponibilità di ritiro
Panoramica
ROBOTERA XHAND 1 è una mano robotica a cinque dita con moduli articolari a trasmissione diretta completa e 12 gradi di libertà attivi. La mano è delle dimensioni di una mano umana (191 mm x 94 mm x 47 mm) ed è progettata per una manipolazione abile con rilevamento tattile ad alta risoluzione, forza di presa robusta e interfacce amichevoli per gli sviluppatori per la ricerca e l'integrazione nella robotica.
Caratteristiche principali
- Architettura a trasmissione diretta completa con moduli articolari a ingranaggi integrati e controllati dalla forza (3 nel pollice; 9 nelle altre quattro dita).
- 12 gradi di libertà completamente attivi; oscillazione laterale dell'indice di +/-15° per una manipolazione complessa in mano.
- Elevate prestazioni di presa: forza della punta delle dita 15N; forza massima di presa 80N; peso massimo di presa fino a 25 Kg (palmo in su) e 16 Kg (palmo a sinistra).
- Attuazione ad alta velocità che supporta >2Hz ripetizione apertura/chiusura; clic delle dita dimostrato fino a 10 CPS (Clic al secondo).
- Copertura tattile a 270° con cinque sensori tattili tridimensionali; risoluzione totale della mano 12x10 per dito x 5.
- Sensing di forza tridimensionale inclusi forze tangenziali (X e Y); precisione di riposizionamento del dito +/-0,20 mm.
- Ritorno guidabile con smorzamento <= 0,1 Nm; controllo della forza a circuito chiuso e controllo forza-posizione per interazione conforme.
- Connettività amichevole per sviluppatori: EtherCAT e RS485 (USB); compatibile con ROS1/ROS2, Ubuntu (Linux), architetture x86 e ARM, TwinCAT e bracci robotici comuni (inclusi xARM, Realman, UR).
- Durabilità valutata per 1.000.000 cicli di presa a vuoto; temperatura di funzionamento -20°C ~ 60°C.
Per richieste, supporto all'integrazione o acquisti in blocco, contattare [email protected] or visita https://rcdrone.top/.
Specifiche
| Parametro | Valore |
|---|---|
| Peso | 1100 g |
| Dimensioni (L x P x A) | 191 mm x 94 mm x 47 mm (La dimensione di una mano adulta) |
| DoF Attivi (Totale) | 12 |
| DoF Passivi (Totale) | 0 |
| Allocazione DoF | Pollice x 3; Indice x 3; Medio x 2; Anulare x 2; Mignolo x 2 |
| Attuazione/Trasmissione del Pollice | Modulo articolare a controllo di forza con ingranaggi x 3 |
| Attuazione/Trasmissione delle Quattro Dita | Modulo articolare a controllo di forza con ingranaggi x 9 |
| Configurazione della Punta delle Dita | Punte delle Dita Rotonde o Arrotondate |
| Oscillazione Laterale | -15°~+15° (Indice) |
| Precisione di posizionamento ripetuto a punta delle dita | +/− 0.20 mm |
| Modalità di Controllo | Controllo della posizione (bassa smorzamento/alta smorzamento), controllo della forza in anello di corrente, controllo forza-posizione |
| Forza della Punta delle Dita | 15N |
| Massima Forza di Presa (intera mano) | 80N |
| Peso Massimo di Presa (palmo sinistro) | 16 Kg |
| Peso Massimo di Presa (palmo in alto) | 25 Kg |
| Opposizione Massima del Pollice | Piccolo Mignolo |
| Velocità di Ripetizione Apertura/Chiusura | >2Hz |
| Smorzamento di Retroguida (Retroguida) | <= 0.1 Nm |
| Copertura Tattile | 270° circonferenza delle punte delle cinque dita |
| Numero di Sensori Tattile | Cinque sensori di array tattile tridimensionale circonferenziali a 270° sulle cinque punte delle dita |
| Risoluzione Tattile (mano intera) | 12x10 (circonferenza a 270° per punta) x 5 |
| Dimensioni della Sensibilità Tattile | Sensibilità alla forza tridimensionale (inclusi forze tangenziali X e Y) |
| Frequenza di Controllo della Mano Intera | 83Hz |
| Velocità di Comunicazione | EtherCAT: 100MHz; RS485: 3MHz |
| Parametri di Sensibilità | Punte delle dita: 120 forze di profilazione tridimensionale; Giunti: posizione, velocità, temperatura, corrente (coppia) |
| Parametri di Controllo | Posizione dell'articolazione; coppia dell'articolazione; coefficiente di rigidità dell'articolazione; coefficiente di smorzamento dell'articolazione |
| Cicli di presa senza carico | 1.000.000 cicli |
| Intervallo di temperatura di funzionamento | -20°C ~ 60°C |
| Tensione di lavoro | 24V ~ 72V |
| Corrente statica | 0.15A @48V, 7W |
| Corrente Massima | 2.5A @48V, 120W |
| Interfaccia di Comunicazione | RS485 (USB), EtherCAT |
Applicazioni
- Teleoperazione: supporta teleoperazione MR e guanti; teleoperazione Vision Pro; Manus Gloves; Pico/Meta Quest.
- Integrazione di bracci robotici e umanoidi: compatibile con xARM, Realman, UR e altri bracci robotici.
- Ricerca e simulazione: URDF preciso, simulazione di sensori tattili; adatto per l'apprendimento per rinforzo con Isaac Gym e Mujoco.
- Interazione uomo-macchina e operazione di strumenti umani con controllo della forza conforme.
Manuali
Xhand_adapter.stp
MH2.25_right_stp.zip
MH2.25_left_stp.zip
XHand_Control_ROS_Documentation.pdf
X-Hand_1_Product_Manual_1.0.pdf
X-Hand_1_User_Quick_Start_Instructions_1.0.pdf
Dettagli

ROBOTERA XHAND1 mano robotica con azionamento diretto completo, che offre vera libertà e destrezza avanzata.

XHAND1 di ROBOTERA: mano umanoide a cinque dita con 12 gradi di libertà, sensori tattili da 270° per punta delle dita, forza di presa di 80N, capacità di carico di 25kg. Progettata per compiti complessi e gestione degli strumenti.

XHAND 1: Prima mano abile con moduli a azionamento diretto per giunto. Caratteristiche motori cordless ad alta potenza, riduttori a bassa smorzamento, encoder di precisione e moduli di giunto integrati sviluppati internamente per una manipolazione robotica avanzata.
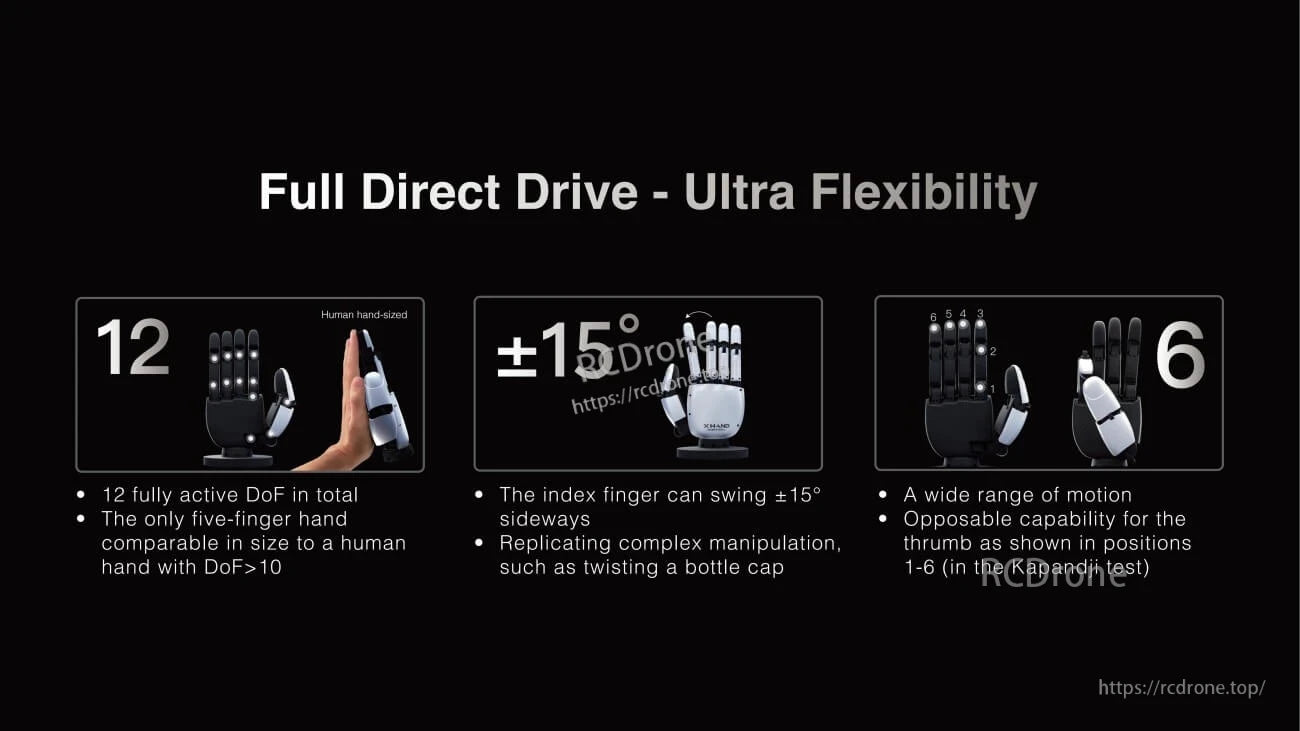
ROBOTERA XHAND 1 è una mano robotica ultra-flessibile, di dimensioni umane, con 12 DoF attivi. Il suo dito indice si muove di ±15° lateralmente per compiti complessi, e il pollice offre sei posizioni opponibili per una manipolazione versatile.

ROBOTERA XHAND 1: carico di 25 kg, forza di presa di 80N, azionamento diretto completo, supera soluzioni simili a collegamenti/tendini.

La mano robotica a azionamento diretto completo raggiunge 10 CPS con velocità a ingranaggi, coppia superiore a 1 Nm, superando i sistemi a collegamento e tendine per prestazioni di gioco superiori.

ROBOTERA XHAND 1 ha sensori per le punte delle dita a 270° con >100 punti e precisione di 0,05 N per la rilevazione di forza 3D, tattili e di temperatura, garantendo prestazioni di presa superiori.
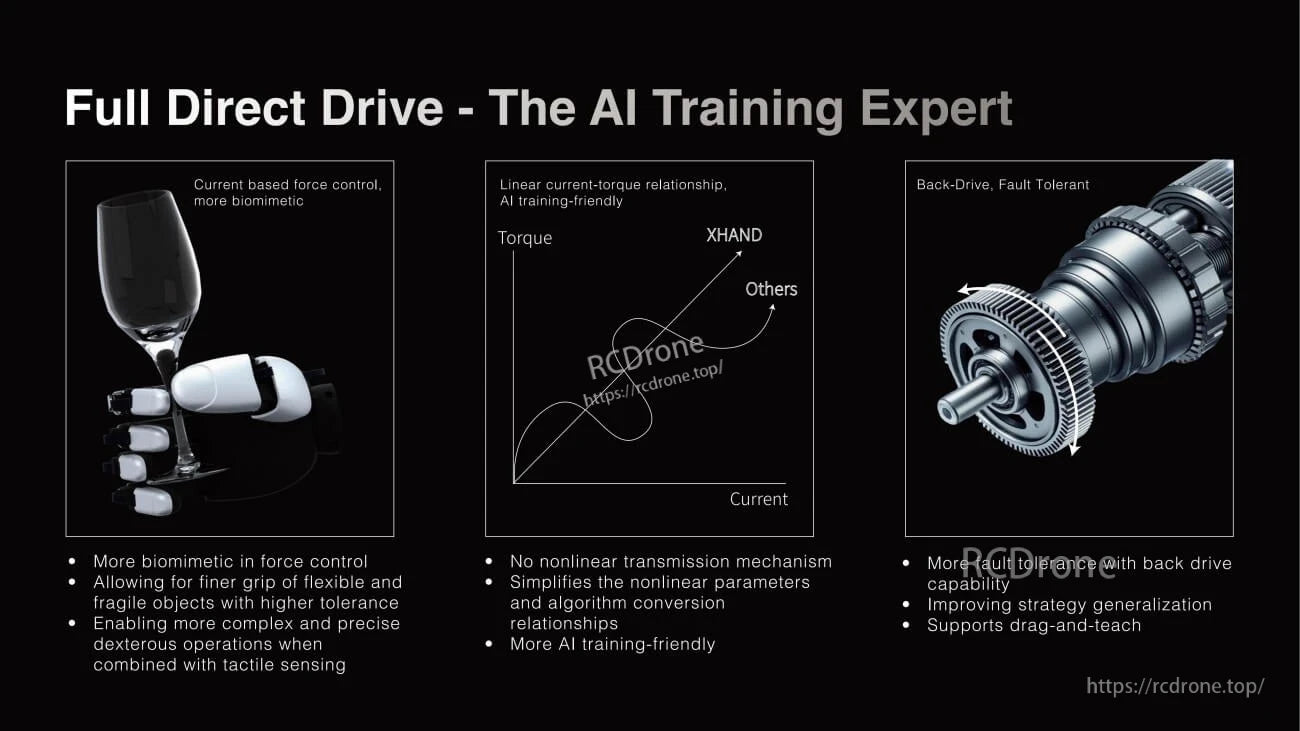
ROBOTERA XHAND 1 offre controllo della forza biomimetico, risposta coppia-corrente lineare per l'addestramento AI e tolleranza ai guasti di retroazione—consentendo una manipolazione precisa, algoritmi semplificati, supporto drag-and-teach e miglioramento della generalizzazione delle strategie.
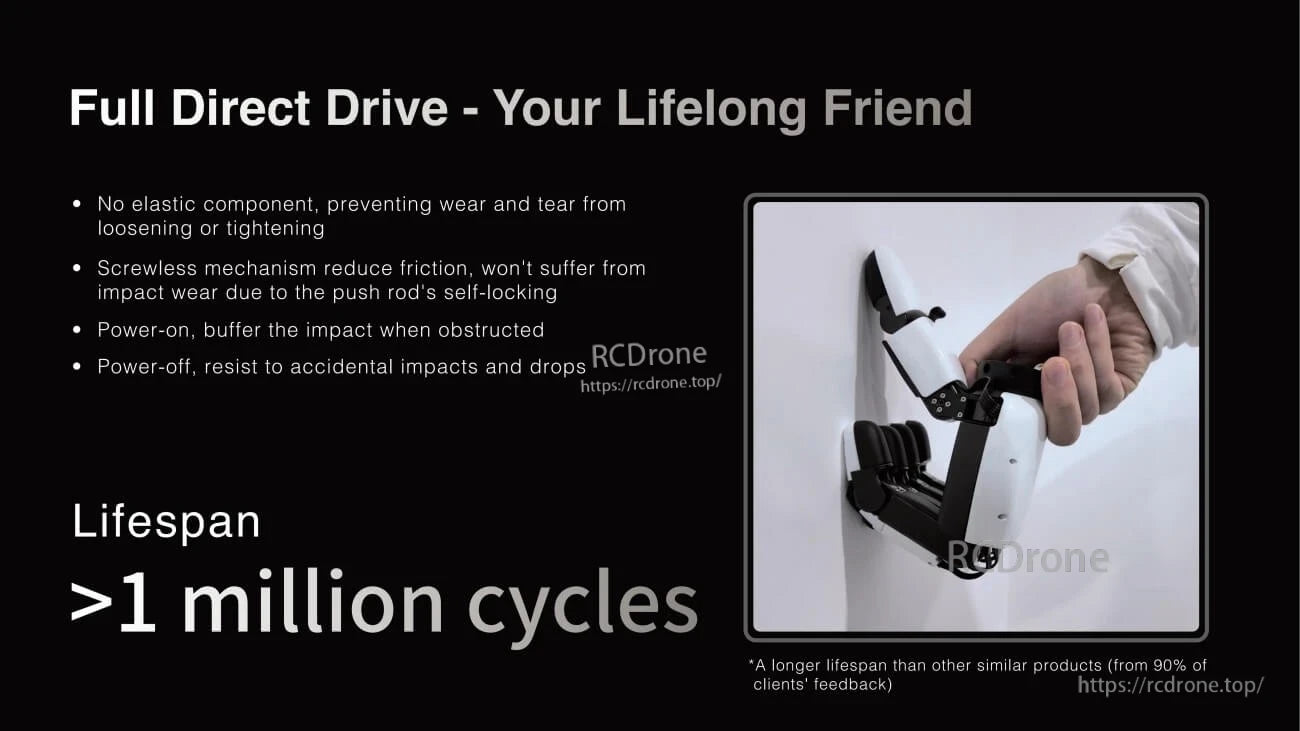
La mano robotica Full Direct Drive offre durata senza parti elastiche o viti, ammortizzazione degli urti quando è accesa, resistenza alle cadute quando è spenta e una vita utile che supera un milione di cicli—superando prodotti simili secondo il feedback dei clienti.

ROBOTERA XHAND 1 supporta la teleoperazione MR e guanti, compatibile con ROS1/ROS2 e Ubuntu su x64/ARM. Presenta EtherCAT/TwinCAT/RS485 per integrazione con xARM, Realman, bracci robotici UR. Offre modellazione URDF precisa e simulazione di sensori tattili. Progettato per applicazioni robotiche amichevoli per gli sviluppatori con flessibilità multipiattaforma e protocolli di controllo avanzati.
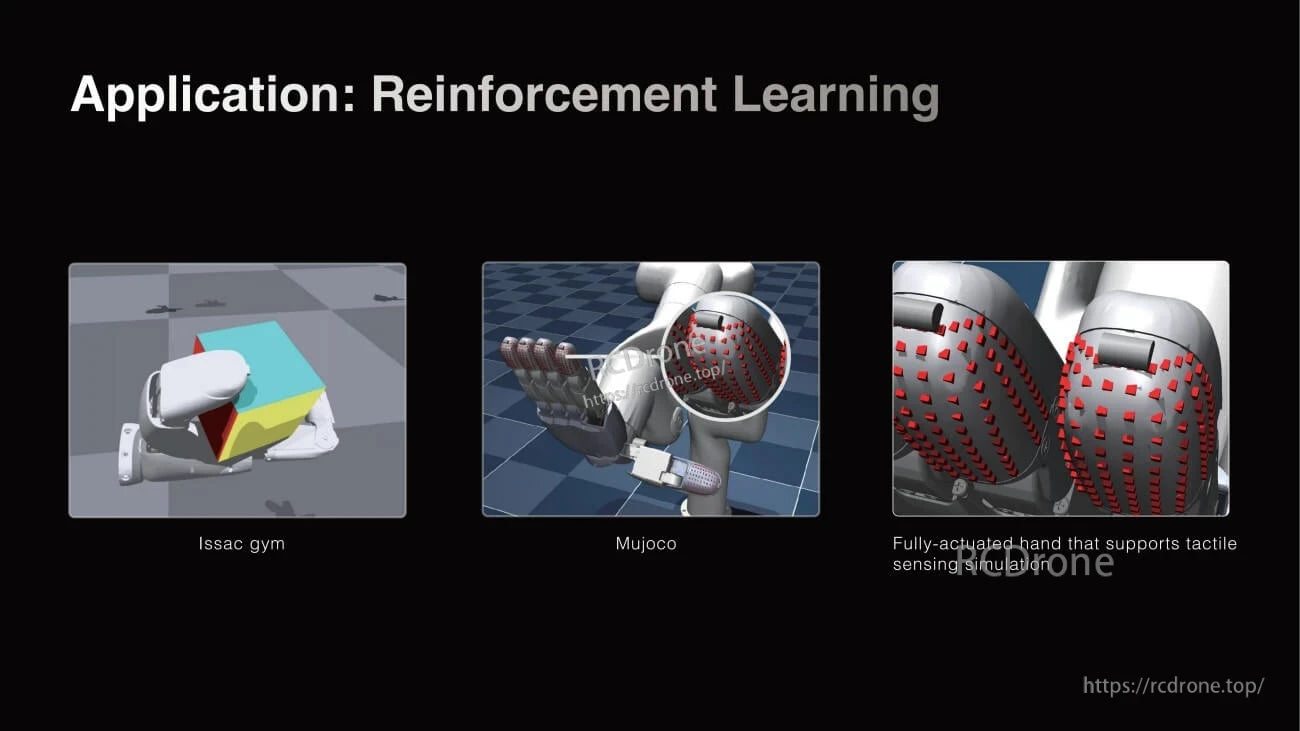
Applicazioni di apprendimento per rinforzo: Issac gym, Mujoco, e mano completamente attuata con simulazione di sensori tattili per ambienti avanzati di controllo e formazione robotica.
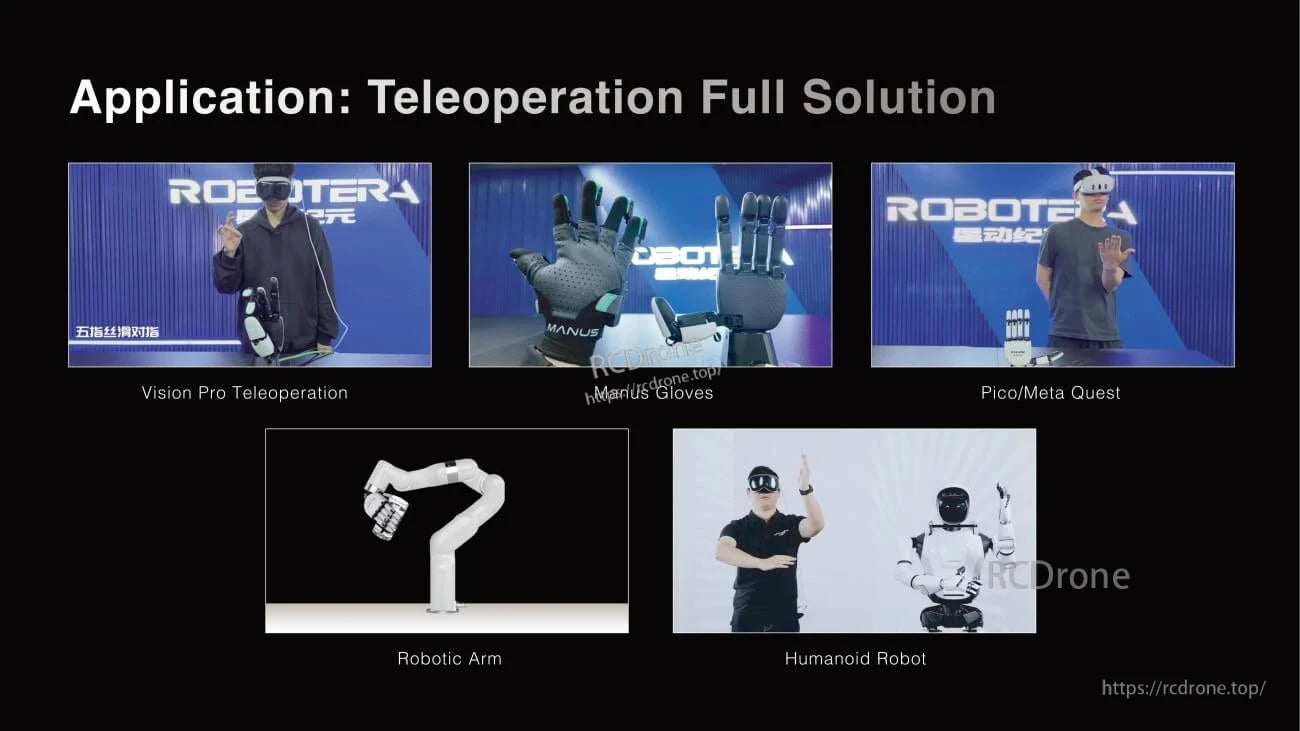
Soluzione completa di teleoperazione con Vision Pro, Manus Gloves, Pico/Meta Quest, braccio robotico e robot umanoide per un controllo remoto avanzato.
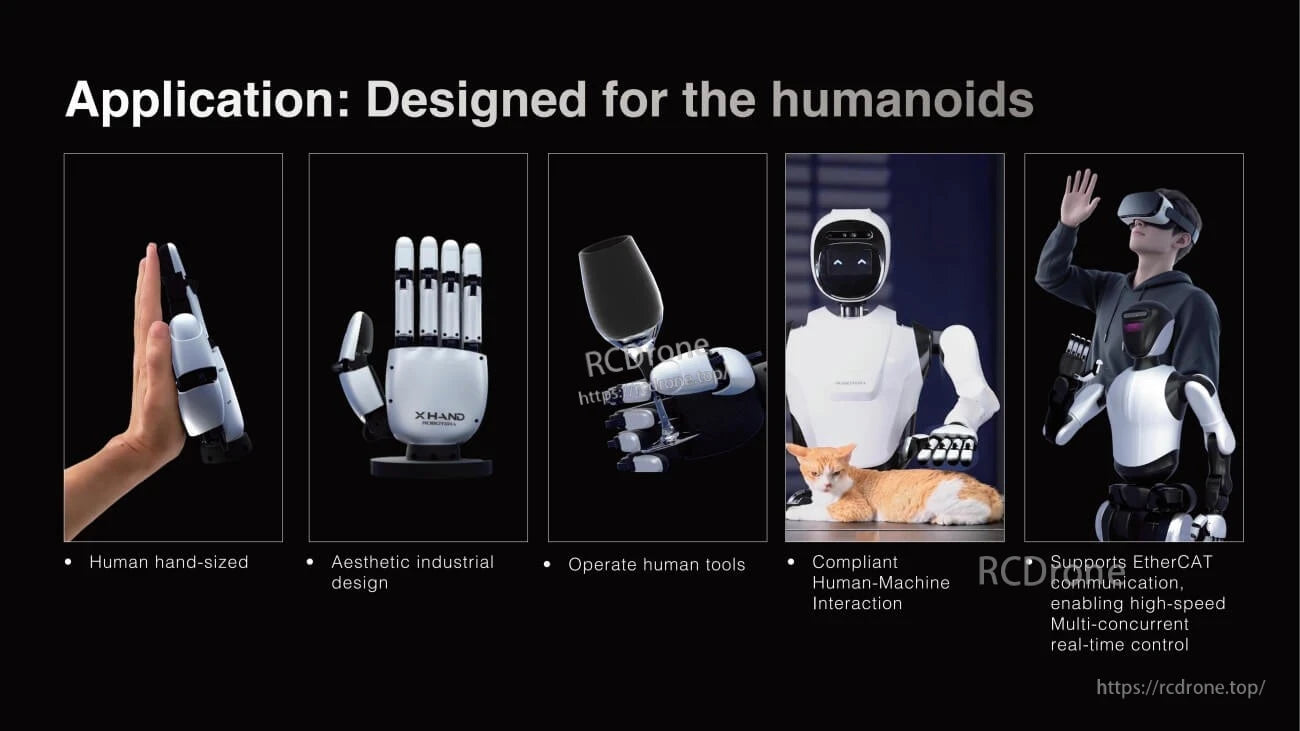
Mano robotica di dimensioni umane con design estetico, opera strumenti, consente interazioni conformi, supporta EtherCAT per il controllo in tempo reale.
Related Collections




