



Drone programmabile S2-F290 - Pixwawk Open Source ROS SLAM AI Sviluppo secondario Livello industriale per Drone Challenge
Drone programmabile S2-F290 - Pixwawk Open Source ROS SLAM AI Sviluppo secondario Livello industriale per Drone Challenge
RCDrone
Impossibile caricare la disponibilità di ritiro
Panoramica
IL Drone programmabile S2-F290 è un prodotto ad alte prestazioni drone di livello industriale progettato per lo sviluppo secondario e le sfide dei droni. Caratterizzato da un capacità di carico utile di 2400 g, UN Batteria 6S 6000mAh, e un distanza massima di controllo di 10 km, fornisce precisione con Precisione del posizionamento GPS di ≈1–2m E resistenza al vento di livello 3-4Alimentato da Controllore di volo Pixhawk 2.4.8 con tecnologia ROS SLAM open source, il drone supporta funzioni avanzate come Mappatura LiDAR 3D, riconoscimento di oggetti basato su YOLO e volo in formazione. Suo Telaio in fibra di carbonio da 3 mm garantisce una durata e una stabilità eccezionali, testate in condizioni estreme. La piattaforma è altamente personalizzabile, offrendo funzionalità come il supporto della stazione di terra QGC cinese/inglese, espandibilità modulare e tutorial completi, rendendola ideale per applicazioni di ricerca, competizione e sviluppo.
Specificazione
Aereo
| Parametro | Specificazione |
|---|---|
| Nome | Drone programmabile S2-F290 |
| Peso del carico utile | 2400g |
| Modello | S2-F290 |
| Precisione del posizionamento GPS | circa 1–2 metri |
| Passo | 290mm |
| Peso massimo al decollo | 3190g |
| Batteria | Batteria standard 6S da 6000 mAh |
| Distanza di controllo | 10KM (consigliato entro 1000m) |
| Resistenza al vento | Livello 3–4 |
| Ambiente operativo | Interno/Esterno |
| Risultati dei test di resistenza | Dettagli |
|---|---|
| Eliche | 7 pollici |
| Capacità della batteria | 6S 6000mAh (5300mAh utilizzati) |
| Ambiente | Senza vento |
| Tempo di volo | 11 minuti e 30 secondi |
Controllore di volo
| Componente | Specificazione |
|---|---|
| Processore FMU | STM32H743 Cortex-M7, 480 MHz, 2 MB di Flash, 1 MB di SRAM |
| Processore IO | STM32F103 Cortex-M3, 72 MHz, 64 KB di SRAM |
| Sensori | Accelerometro/Giroscopio: ICM-42688-P |
| Accelerometro/Giroscopio: BMI055 | |
| Magnetometro: IST8310 | |
| Barometro: MS5611 | |
| Tensione nominale | Tensione massima di ingresso: 6 V |
| Ingresso alimentazione USB: 4,75-5,25 V | |
| Ingresso servo: 0-36 V | |
| Corrente nominale | Telemetria 1 Corrente di uscita massima: 1A |
| Corrente combinata per altre porte: 1A | |
| Dati meccanici | Dimensioni: 53,3 × 39 × 16,2 mm |
| Peso: 39.2g | |
| Porti | - 14 uscite PWM (8 da IO, 6 da FMU) |
| - 2 porte seriali per uso generale | |
| - 2 porte GPS | |
| - 1 porta I2C | |
| - 2 porte CAN | |
| - Ingresso RC per Spektrum/DSM, S.BUS, CPPM, ecc. | |
| - Porta di ingresso alimentazione | |
| Altre caratteristiche | Temperatura di esercizio: -40–85°C |
Computer di bordo
| Componente | Specificazione |
|---|---|
| Potenza di calcolo | 40 ALTI |
| Scheda grafica | 32 core Tensor con GPU NVIDIA Ampere da 1024 core |
| processore | 6 core Arm Cortex-A78AE v8.2 64 bit, 1,5 GHz |
| Memoria RAM | 8 GB 128 bit LPDDR5 68 GB/s |
| Magazzinaggio | Scheda SD o NVMe esterna |
| Frequenza massima della CPU | 1,5 GHz |
Controllo remoto
| Componente | Specificazione |
|---|---|
| Tensione di esercizio | 4,2V |
| Corrente di esercizio | 100mA |
| Banda di frequenza | 2,4–2,483 GHz |
| Peso | 525g |
| Dimensioni | Dimensioni: 130 × 150 × 20 mm |
| Durata della batteria | 20 ore |
| Porta di ricarica | MICRO-USB |
| Gamma di controllo | 7 km |
GPS
| Componente | Specificazione |
|---|---|
| Ricevitore satellitare | UBLOX-M9, 92 canali |
| Bussola elettronica | Modello QMC5883L |
| Sistemi satellitari | GPS L1 C/A, GLONASS L1OF, BeiDou B1, Galileo E1 |
| Canali satellitari | 32 |
| Frequenza di aggiornamento | 25 Hz |
| Precisione di posizionamento | 1,5 m CEP (ambiente ideale) |
| Tempo di avvio | Avvio a freddo: 24s, avvio a caldo: 1s |
| Dimensioni | Dimensioni: 25 × 25 × 8 mm |
| Peso | 12g |
Batteria
| Componente | Specificazione |
|---|---|
| Tipo di connettore | XT60 |
| Corrente di carica consigliata | dalle 3 alle 5 del mattino |
| Capacità della batteria | 6000mAh |
| Tensione nominale | 22.2V |
| Tasso di scarico | 75C |
| Dimensioni | Dimensioni: 50 × 44 × 158 millimetri |
| Peso | 816g |
Sensore LiDAR
| Componente | Specificazione |
|---|---|
| Lunghezza d'onda laser | 905 nm |
| Allineare | 40 m @ 10% di riflettività, 70 m @ 80% di riflettività |
| Area minima di rilevamento | 0,1 milioni |
| Campo visivo | Orizzontale: 360°, Verticale: da -7° a 52° |
| Output nuvola di punti | 200.000 punti/secondo |
| Tasso di punti | 10 Hz |
| Livello di protezione | Grado di protezione IP67 |
| Energia | 6,5 W (ambiente 25 °C) |
| Gamma di tensione | 9–27 V CC |
| Dimensioni | Dimensioni: 65 × 65 × 60 mm |
| Peso | 265g |
Telecamera di profondità
| Componente | Specificazione |
|---|---|
| Tecnologia di profondità | Doppio infrarosso |
| Angolo di visione della profondità | 87° × 58° (Orizzontale × Verticale) |
| Risoluzione della profondità | Dimensioni: 1280 × 720 |
| Precisione della profondità | <2% entro 2m |
| Frequenza fotogrammi di profondità | 90 fps |
| Gamma di profondità | 0,3–3m |
| Dimensioni | Dimensioni: 90 × 25 × 25 mm |
| Ambiente operativo | Interno/Esterno |
Fotocamera a obiettivo singolo
| Componente | Specificazione |
|---|---|
| Risoluzione massima | 2MP (1920 × 1080) |
| Frequenza fotogrammi massima | 30 fps |
| Campo visivo | ~90° |
| Lunghezza del cavo | ~1.5 metri |
| Dimensioni | Dimensioni: 35 × 35 × 30 mm |
Tabella delle funzioni
| unzione | Configurazione di base | D435 opzionale | Modulo opzionale D435 + 4G |
|---|---|---|---|
| Mantenimento dell'altitudine, volo stazionario, ritorno a casa | ✔ | ✔ | ✔ |
| Atterraggio, stabilizzazione, volo waypoint | ✔ | ✔ | ✔ |
| Volo telecomandato | ✔ | ✔ | ✔ |
| Comunicazione tra il controllore di volo e il computer di bordo | ✔ | ✔ | ✔ |
| Riconoscimento e atterraggio del codice QR | ✔ | ✔ | ✔ |
| Riconoscimento e rilascio degli oggetti | ✔ | ✔ | ✔ |
| Mappatura simultanea ed evitamento degli ostacoli | ✔ | ✔ | ✔ |
| Mappatura e posizionamento LiDAR 3D | ✔ | ✔ | ✔ |
| Riconoscimento di oggetti basato su YOLO | ✘ | ✔ | ✔ |
| Riconoscimento e tracciamento degli oggetti | ✘ | ✔ | ✔ |
| Controllo remoto 4G | ✘ | ✘ | ✔ |
Il pacchetto include
Configurazione di base
- Telaio: Telaio in fibra di carbonio F290
- Motori: 4× Motore T F100 Kv1100
- ESC: 4× FlyFun T-rex 5 45A
- Eliche: 4 eliche a tre pale da 7 pollici
- Controllore di volo: Pixhawk6mini
- Batteria: Batteria standard 6S 6000mAh
- Caricabatterie: Caricabatterie 6S
- Computer di bordo: Modulo Jetson Orin Nano 8G + WIFI
- Unità SSD: 256G
- Sensore LiDAR: Livox MID360
- Telecamera: Telecamera USB grandangolare 150°
- Controllo remoto: Cloud T10 (include ricevitore dati)
Configurazione opzionale: D435
Include tutti i componenti del Configurazione di base, più:
- Fotocamera a doppia lente:D435
Configurazione opzionale: modulo D435 + 4G
Include tutti i componenti del Di base Configurazione, più:
- Fotocamera a doppia lente:D435
- Modulo 4G
Dettagli
Drone programmabile S2-F290
- ✔ Supporto tecnico, servizio post-vendita senza problemi
- ✔ Fornisce esempi di concorrenza, personalizzabili
- ✔ Stazione di terra mobile cinese/inglese
- ✔ Alta stabilità, alte prestazioni
- ✔ Interno/Esterno
L'S2-F290 è un drone all'avanguardia, studiato appositamente per le gare tra droni, specializzato in esplorazione e innovazione.Progettato per integrare tecnologia avanzata e creatività illimitata, è in grado di adattarsi a diversi ambienti complessi, rendendo l'esplorazione aerea più accessibile ed efficace.
Questo drone è caratterizzato da un design compatto con una potenza immensa. Offre una vasta gamma di esempi di competizione, consentendo agli utenti di padroneggiare e ottimizzare rapidamente le sue prestazioni. Dotato di una stazione di terra mobile dedicata in cinese/inglese, migliora notevolmente la praticità di utilizzo del drone. Inoltre, fornisce spiegazioni competitive del codice sorgente e personalizzazione per garantire che gli utenti possano ottenere le funzionalità desiderate nel più breve tempo possibile, eccellendo negli scenari competitivi.

Soddisfare le esigenze di sviluppo / competizione / ricerca
| Categoria | Dettagli |
|---|---|
| Conoscenze di base ROS | - Controllo remoto |
| - Comunicazione tra Flight Controller e Onboard Computer | |
| Funzioni di base | - Pianificazione del percorso |
| - Riconoscimento e posizionamento del codice QR | |
| - Pattuglia autonoma fuori bordo | |
| Funzioni avanzate | - Riconoscimento del codice QR per l'atterraggio |
| - Riconoscimento e rilascio di oggetti | |
| - Mappatura simultanea e prevenzione degli ostacoli | |
| - Mappatura e posizionamento LiDAR 3D | |
| - Riconoscimento di oggetti basato su YOLO | |
| - Trasmissione video basata sul Web | |
| - Volo in formazione all'aperto | |
| - Formazione collaborativa terra-aria | |
| Funzioni opzionali della fotocamera D435 | - Posizionamento visivo VINS |
| - Riconoscimento e tracciamento degli oggetti basati su YOLO | |
| Funzioni di comunicazione 4G opzionali | - Controllo remoto 4G |
Evitamento autonomo degli ostacoli, garanzia di sicurezza completa
Utilizzando il LiDAR 3D per l'evitamento autonomo degli ostacoli, il drone combina la pianificazione globale del percorso con l'evitamento dinamico degli ostacoli locali per rilevare con precisione gli ostacoli da tutte le direzioni. Supporta l'arresto automatico e il volo continuo, consentendo l'evitamento flessibile degli oggetti lungo il percorso di volo, garantendo un'esperienza di volo più sicura.

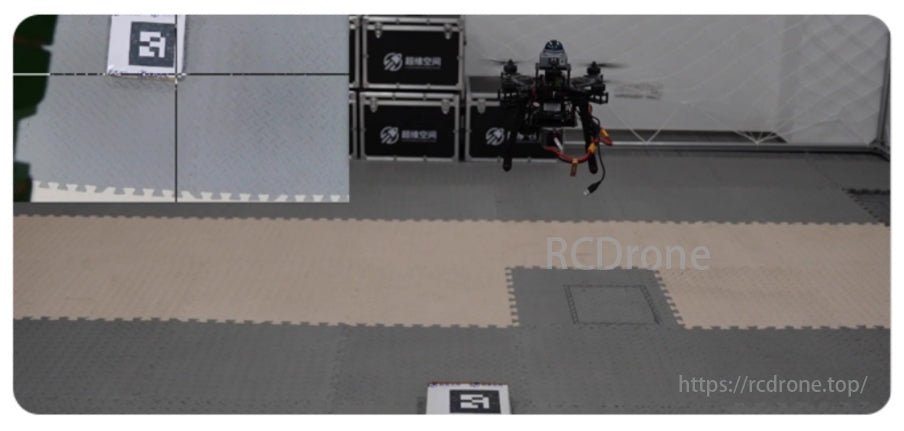
Riconoscimento e atterraggio del codice QR
Il drone attiva la telecamera e il modulo di riconoscimento del codice QR per acquisire le informazioni sulla posizione in tempo reale del codice QR. Durante la discesa, il drone regola dinamicamente la sua posizione, assicurando un allineamento preciso con il campo visivo della telecamera prima di procedere all'atterraggio.
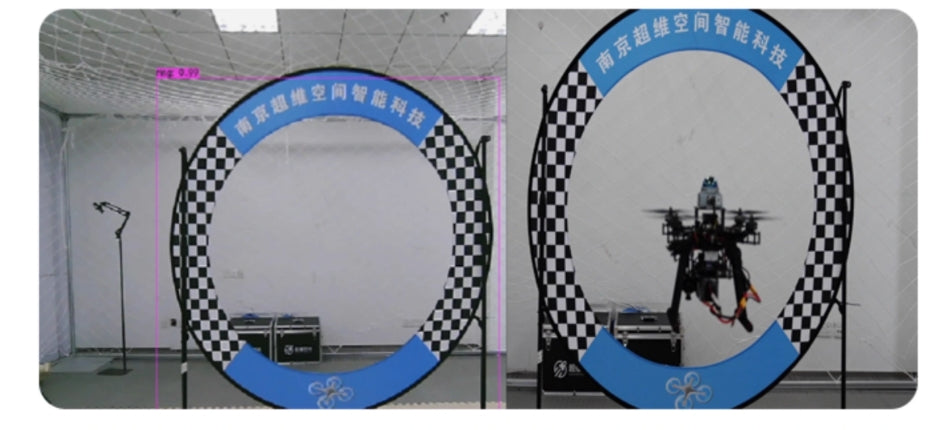
Riconoscimento degli oggetti YOLO
Il drone utilizza YOLOv8 per il riconoscimento degli oggetti, acquisendo le informazioni sulla posizione del frame circolare in tempo reale. Regola autonomamente la sua posizione e naviga attraverso il frame circolare.
Volo in formazione all'aperto
Il drone sfrutta la tecnologia della formazione a sciame, consentendo il controllo coordinato di più droni per ottenere il volo in formazione.Sfruttando algoritmi avanzati di comunicazione e controllo collaborativo, facilita la comunicazione in tempo reale e lo scambio di informazioni tra droni, sincronizzandone i movimenti e le posizioni per formare una formazione compatta.

Formazione collaborativa terra-aria
Questa piattaforma supporta la formazione collaborativa tra droni terrestri e aerei. Sfruttando una rete locale con strutture topologiche per l'interconnettività dei dispositivi, utilizza la comunicazione UDP e protocolli personalizzati per garantire una comunicazione stabile e ad alta velocità. Con il controllo PID, ottiene un follow-up sincronizzato tra il drone principale e più droni slave, garantendo stabilità della formazione ed efficienza operativa.

Esempio di concorrenza
Offre scenari di competizione esclusivi con istruzioni dettagliate, consentendo ai partecipanti di adattarsi facilmente a vari tipi di competizioni.



Caratteristiche del drone programmabile S2-F290
Elevato rapporto costo-prestazioni
- Progettato per i principianti, per ridurre la curva di apprendimento e semplificare la padronanza del funzionamento del drone.
- Il suo prezzo accessibile lo rende il drone didattico ideale per studenti e appassionati.
Alta stabilità
- Testato in varie condizioni estreme per tre anni.
- Dotato di telaio in fibra di carbonio da 3 mm di spessore per maggiore durata e stabilità.
- Consente agli utenti di ottenere riconoscimenti nella loro prima esperienza di competizione.
Espandibilità
- Supporta la personalizzazione avanzata per diverse applicazioni.
- Compatibile con vari componenti di espansione per migliorare costantemente le prestazioni e la funzionalità del drone.
Servizio post-vendita senza pensieri
- Team di professionisti che fornisce consulenza e supporto completi.
- Offre riparazioni gratuite per danni hardware causati da errori operativi durante il periodo di garanzia (esclusi accessori e batterie).
Personalizzabile
- Fornisce supporto per lo sviluppo esclusivo in ROS e QGC.
- Supporta un'elevata precisione, superiore al 98%, per la mappatura e la navigazione.
- Compatibile con moduli RTK/GPS, loghi e varie funzionalità esclusive.

Configurazione della stazione di terra
Utilizzo del Flight Controller Pixhawk 2.4.8
Dotato del più recente processore standard STM32F427 a 32 bit e del barometro MS5611, questo controllore di volo offre numerose interfacce e un rapporto qualità-prezzo elevato come opzione open source.
1. Stazione di terra QGC esclusiva e profondamente personalizzata
- Raggiunge una localizzazione in cinese superiore al 98%.
- Supporta funzionalità avanzate come NTRIP.
2. Stazione di terra mobile QGC
- Fornisce una versione mobile della stazione di terra QGC, consentendo un funzionamento senza interruzioni tramite smartphone.
3. Connessione Wi-Fi o 4G Direct
- Per utilizzarlo tramite smartphone o computer è sufficiente connettersi tramite Wi-Fi.
- Nota: Il sistema "ezuav" mostra di essere connesso al dispositivo ma non riesce a fornire accesso a Internet.

Tutorial completi e risorse completamente open source
- Tutorial di utilizzo estremamente dettagliati che coprono tutti gli aspetti delle funzionalità del drone S2-F290.
- Materiali completamente open source, tra cui:
- Introduzioni software e guide all'installazione.
- Tutorial per funzionalità di base e avanzate, come il riconoscimento di oggetti basato su OpenCV, la mappatura 3D e il volo autonomo fuori bordo.
- Istruzioni di sviluppo personalizzate per la comunicazione PX4 e MAVLink.
- Domande frequenti sulla risoluzione dei problemi, configurazione dell'ambiente ROS e passaggi operativi.
Related Collections


