









Modulo giunto robotico SteadyWin GIM3510-8, ingranaggio planetario 8:1, driver CAN, doppio encoder, 24V 60W
Modulo giunto robotico SteadyWin GIM3510-8, ingranaggio planetario 8:1, driver CAN, doppio encoder, 24V 60W
SteadyWin
Impossibile caricare la disponibilità di ritiro
Panoramica
Il SteadyWin modulo articolare per robot GIM3510-8 è un attuatore articolare robotico integrato che combina un motore Aloha, un riduttore planetario 8:1, un driver di comunicazione integrato e doppi encoder in un pacchetto cilindrico compatto. Con un'alimentazione nominale di 24 V (ampia gamma di 12–40 V o 12–48 V a seconda della scheda del driver), alta velocità di uscita fino a 564,6 rpm dopo la riduzione e comunicazione CAN bus, è progettato per robot umanoidi agili, bracci robotici, piattaforme mobili e altri sistemi multiassi che richiedono un controllo del movimento preciso e in anello chiuso.
Caratteristiche principali
- Riduzione planetaria ad alta velocità: riduttore planetario 8:1 con velocità di uscita nominale di 535,5 rpm e massima di 564,6 rpm (GDZ34), adatto per articolazioni in rapido movimento.
- Ampia gamma di tensione: funzionamento nominale a 24 V con gamma di ingresso 12–40 V (GDZ34) o 12–48 V (GDS34) per un design flessibile del sistema di alimentazione.
- Uscita di coppia efficiente: Costante di coppia fino a 0,32 N.m/A con coppia nominale fino a 1,68 N.m e coppia di picco fino a 6,02 N.m, fornendo una trasmissione di potenza efficiente per giunti robotici leggeri e di media capacità.
- Driver integrato con bus CAN: Scheda driver integrata (GDS34 o GDZ34) supporta la comunicazione CAN per un cablaggio semplificato e un controllo in rete.
- Feedback dual encoder: Encoder a 14 bit sul driver e un secondo encoder sull'albero di uscita per un feedback preciso di posizione e velocità.
- Struttura compatta: Solo 46 mm di diametro esterno con lunghezza totale da 46,5 mm (senza driver) a 51,5 mm (con driver), consentendo layout multi-giunto densi.
- Durabilità ambientale: Classe di protezione IP54, temperatura di funzionamento da -20°C a +80°C e livello di rumore inferiore a 60 dB.
- Funzioni di protezione: La protezione da sovratemperatura, sovratensione e sovraccarico aiuta a mantenere un funzionamento sicuro e affidabile nei sistemi robotici a funzionamento continuo.
- Robustezza meccanica: Supporta un carico assiale fino a 75 N e un carico radiale di 300 N sull'albero di uscita, con un gioco del riduttore di 15 arcmin.
- Opzione freno personalizzato: Supporta l'integrazione di freni personalizzati per giunti che richiedono una coppia di mantenimento quando non alimentati.
Per supporto tecnico, personalizzazione o domande di integrazione riguardanti il modulo giunto per piccoli robot GIM3510-8, si prega di contattare https://rcdrone.top/ o inviare un'email a [email protected].
Applicazioni
- Robot umanoidi
- Bracci robotici
- esoscheletri
- Robot quadrupedi
- Veicoli AGV
- Robot ARU
Specifiche
| Parametro | Unità | GIM3510-8 + GDS34 (SDC101) | GIM3510-8 + GDZ34 |
|---|---|---|---|
| Modello | - | GIM3510-8 | GIM3510-8 |
| Modello della scheda di controllo | - | GDS34 (SDC101) | GDZ34 |
| Tensione nominale | V | 24 | 24 |
| Intervallo di tensione | V | 12–48 | 12–40 |
| Potenza nominale | W | 98 | 60 |
| Momento torcentale nominale | N.m | 1.68 | 1.00 |
| Momento torcentale massimo | N.m | 3.41 | 6.02 |
| Velocità nominale dopo riduzione | giri/min | 430 | 535.5 |
| Velocità massima dopo riduzione | giri/min | 529 | 564.6 |
| Corrente nominale | A | 4.1 | 2.5 |
| Corrente di picco | A | 8.30 | 25.30 |
| Resistenza di fase | ohm | 0.48 | 0.48 |
| Induttanza di fase | mH | 0.31 | 0.31 |
| Costante di velocità | giri/min/V | 22.04 | 23.53 |
| Costante di coppia | N.m/A | 0.44 | 0. |
| Numero di coppie di poli | Coppie | 7 | 7 |
| Rapporto di trasmissione | - | 8:1 | 8:1 |
| Tipo di ingranaggio | - | Pianetario | Pianetario |
| Materiale dell'ingranaggio riduttore | - | ALU | ALU |
| Gioco dell'ingranaggio riduttore | arcmin | 15 | 15 |
| Peso del motore senza driver | g | 247.6 | 247.6 |
| Peso del motore con driver | g | 259.6 | 259.6 |
| Dimensione senza driver (diametro x lunghezza) | mm | Ø46 x 46.5 | Ø46 x 46.5 |
| Dimensione con driver (diametro x lunghezza) | mm | Ø46 x 51.5 | Ø46 x 51.5 |
| Carico assiale massimo | N | 75 | 75 |
| Carico radiale massimo | N | 300 | 300 |
| Rumore | dB | <60 | <60 |
| Comunicazione | - | CAN | CAN |
| Secondo encoder sull'albero di uscita | - | SI | SI |
| Grado di protezione | - | IP54 | IP54 |
| Temperatura di funzionamento | °C | -20 a +80 | -20 a +80 |
| Risoluzione encoder (encoder del driver) | bit | 14 | 14 |
| Supporto encoder separato | - | NO | NO |
| Supporto freno personalizzato | - | SI | SI |
Manuali
- SteadyWin_GIM3510-8_Diagramma_di_installazione.stp
- GlM3510-8_schema_di_installazione.pdf
- Gl3510-8_con_freno_schema_di_installazione.pdf
Dettagli

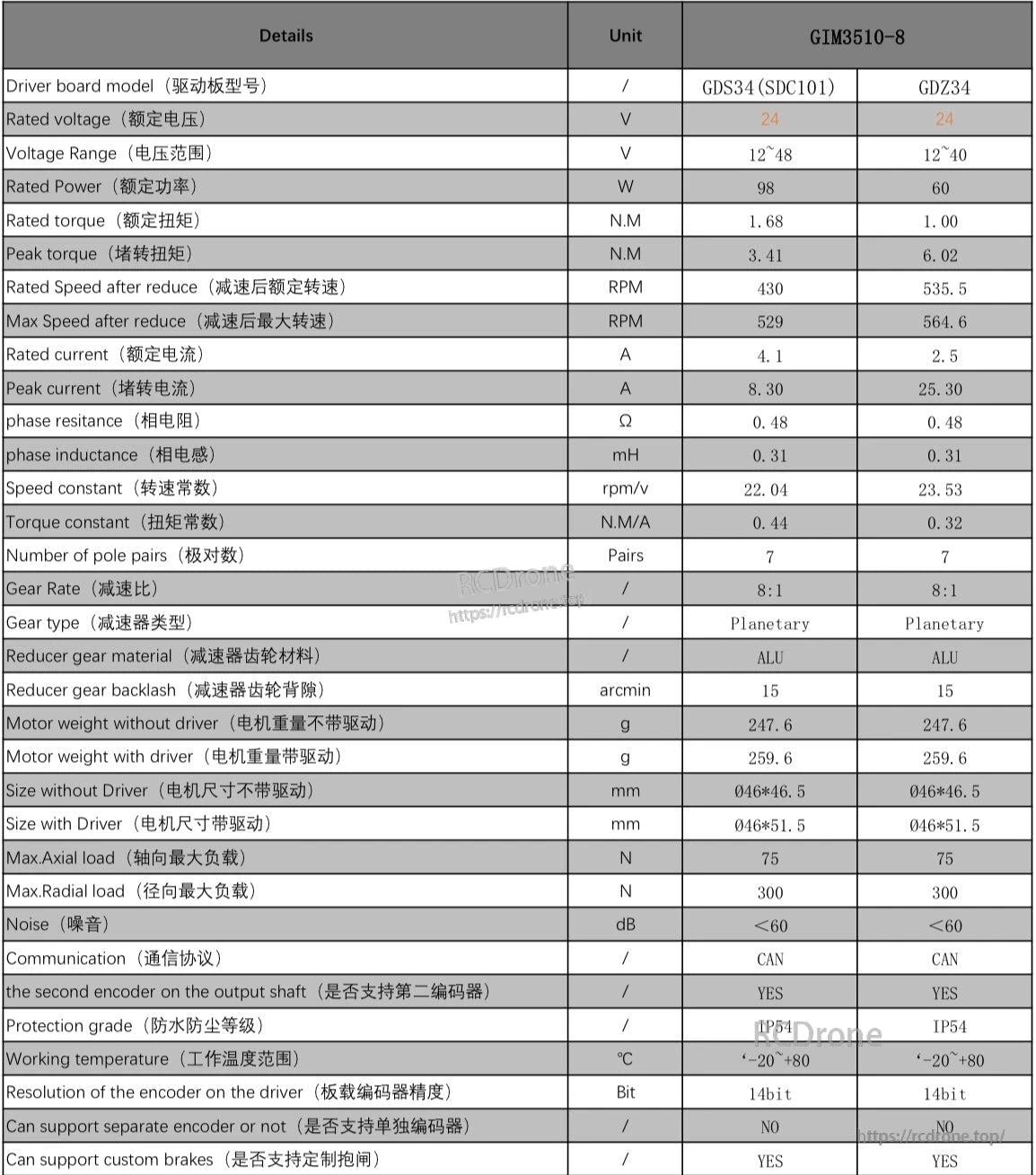
Specifiche del giunto robotico GIM3510-8 confronta le schede driver GDS34 e GDZ34. Le metriche chiave includono tensione, potenza, coppia, velocità, corrente, peso, dimensioni, capacità di carico, rumore, comunicazione, encoder, grado di protezione, intervallo di temperatura e supporto freno personalizzato.
Related Collections









