Kit Pro Motore Servo Braccio Robotico SO-ARM101 per LeRobot (Senza Parti Stampate 3D) – Open Source, 6 Assi, UART, Encoder 12 bit
Kit Pro Motore Servo Braccio Robotico SO-ARM101 per LeRobot (Senza Parti Stampate 3D) – Open Source, 6 Assi, UART, Encoder 12 bit
Seeed Studio
Impossibile caricare la disponibilità di ritiro
Overview
SO-ARM101 è un Kit di Motori Servo per Braccio Robotico Pro ottimizzato per l'imitazione e l'apprendimento per rinforzo con progetti LeRobot e Hugging Face. Questo kit open-source e a basso costo include motori servo, schede adattatrici e cavi per un completo setup di braccio leader–seguace. Il kit è adatto per il fai-da-te ed è progettato per la prototipazione rapida con abbondanti risorse. Importante: il kit motore non include parti stampate in 3D; ordinare lo scheletro stampato in 3D insieme se necessario. Seeed Studio fornisce hardware per LeRobot.
Caratteristiche principali
Cosa c'è di nuovo in SO-ARM101
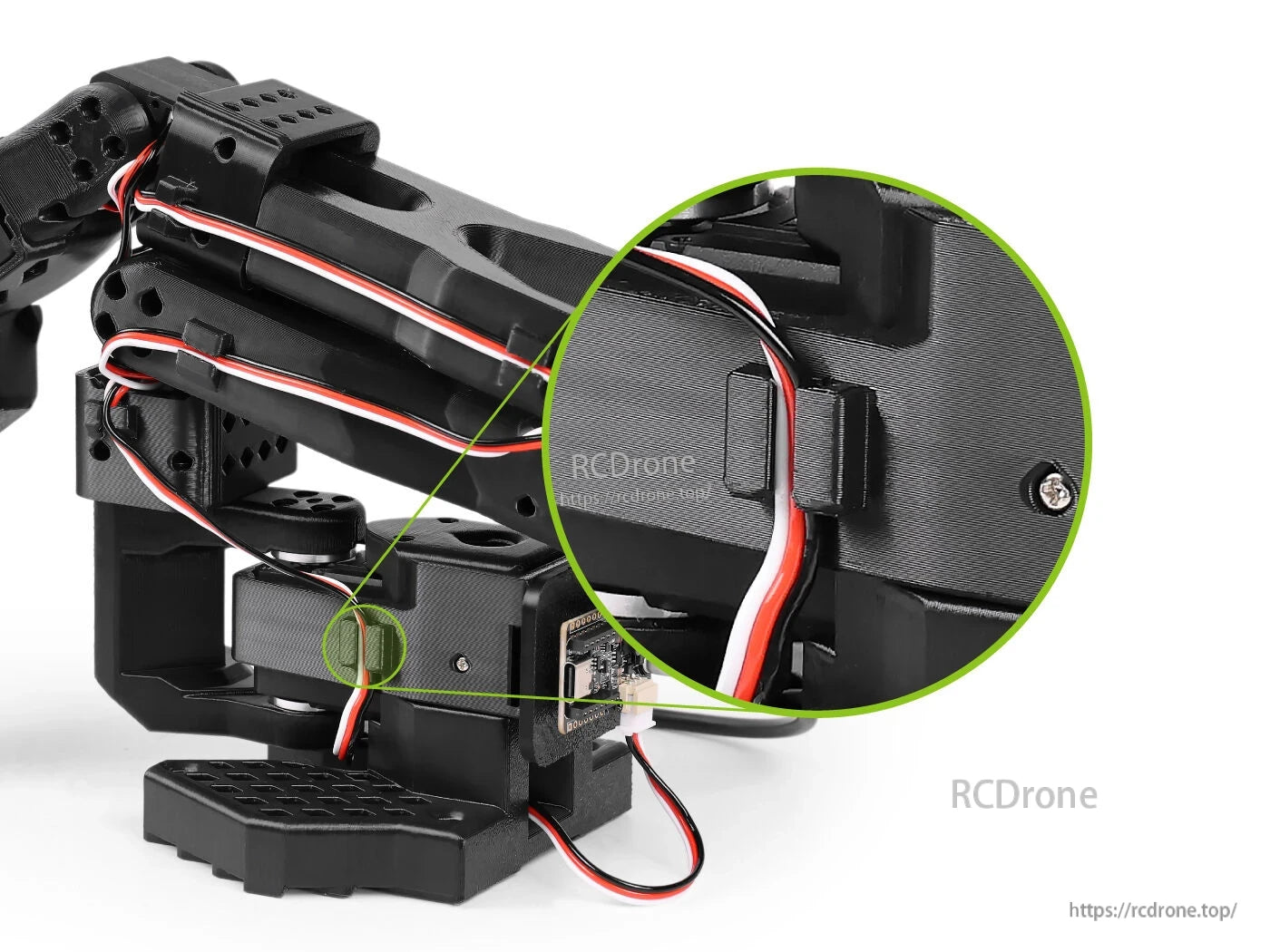
- Ottimizzazione del cablaggio: mitiga le disconnessioni precedentemente riscontrate al giunto 3 e rimuove i limiti di movimento.
- Rapporti di trasmissione del braccio leader ottimizzati: prestazioni migliorate senza scatole di ingranaggi esterne.
- Nuova funzionalità: il braccio leader può seguire il braccio seguace in tempo reale per supportare le politiche di RL e l'intervento umano.
Caratteristiche della serie SO-ARM10x
- Soluzione open-source e a basso costo da TheRobotStudio.
- Integrazione con la piattaforma LeRobot (dataset, modelli e strumenti basati su PyTorch per l'apprendimento per imitazione e l'apprendimento per rinforzo).
- Risorse complete: guide per assemblaggio, calibrazione, test, raccolta dati, formazione e distribuzione.
- Compatibile con Nvidia reComputer Mini J4012 Orin NX 16 GB.
- Bracci robotici a 6 assi (leader e follower) mostrati nei materiali del kit.
Specifiche
| Tipo | Kit Braccio SO-ARM101 Pro |
| Motori del braccio leader (7.4V) | 1× rapporto di trasmissione 1:345 (giunto n.2); 2× 1:191 (n.1 &e n.3); 3× 1:147 (n.4, n.5 &e n.6 pinza) |
| Braccio follower | Stesso del SO-ARM100 Pro |
| Alimentazione (DC 5.5mm*2.1mm) | 12V2A per il braccio seguente; 5V4A per il braccio principale |
| Sensore angolare | Encoder magnetico a 12 bit |
| Temperatura di funzionamento consigliata | 0℃~40℃ |
| Metodo di comunicazione | UART |
| Metodo di controllo | PC |
Confronto
|
SO-ARM10x Economico Kit Braccio AI e Kit Braccio Pro |
||||
|
Tipo |
SO-ARM100 |
SO-ARM101 |
||
|
Kit Braccio |
Kit Braccio Pro |
Kit di bracci |
Kit di bracci Pro |
|
|
Braccio Leader |
12x (7.4V) Motori con rapporto di trasmissione 1:345 per tutte le articolazioni |
12x (12V) motori con rapporto di trasmissione 1:345 per tutte le articolazioni |
1x (7.4V) motore con rapporto di trasmissione 1:345 per l'articolazione n.2 |
|
|
2x (7.4V) motori con rapporto di trasmissione 1:191 per le articolazioni n.1 e n.3 |
||||
|
3x (7.4V) motori con rapporto di trasmissione 1:147 per le articolazioni n.4, n.5 e il gripper n.6 |
||||
|
Braccio Follower |
Stesso di SO-ARM100 |
Stesso di SO-ARM100 Pro |
||
|
Alimentazione |
5.5mm*2.1mm DC 5V4A |
5.5mm*2.1mm DC 12V2A |
5.5mm*2.1mm DC 5V4A |
5.5mm*2.1mm DC 12V2A per braccio seguente |
|
5.5mm*2.1mm DC 5V4A per Leader Arm |
||||
|
Sensore angolare |
Encoder magnetico a 12 bit |
|||
|
Intervallo di temperatura operativo raccomandato Intervallo di temperatura |
0℃~40℃ |
|||
|
Metodo di comunicazione |
UART |
|||
|
Metodo di controllo |
PC |
|||
Cosa è incluso
- Motore servo 7.4v STS3215 rapporto di ingranaggio 1:345 ×1
- Motore servo 7.4v STS3215 rapporto di ingranaggio 1:191 ×2
- 7.4v STS3215 Servo Motor 1:145 rapporto di ingranaggio ×3
- 12v STS3215 Servo Motor 1:345 rapporto di ingranaggio ×6
- Scheda adattatore servo per Seeed Studio XIAO ×2
- Stud ×8
- Vite ×8
- Cavo di alimentazione 5V (testa multipla) × 1
- Cavo di alimentazione 12V (testa multipla) ×1
- Cavo USB-C ×2
- Cavo pigtail di alimentazione DC ×2
Applicazioni
- Apprendimento per imitazione e apprendimento per rinforzo con LeRobot: pipeline end-to-end per raccolta dati, addestramento, simulazione e distribuzione.
- Distribuzione edge Nvidia Jetson: addestramento efficiente di compiti personalizzati di afferrare e posizionare con reComputer J4012 Orin NX 16 GB.
Dettagli

Kit di braccio robotico a 6 assi con hardware open-source, compatibile con reComputer Mini J4012 Orin NX 16GB.Supporta LeRobot su Hugging Face per risorse comunitarie e apprendimento per rinforzo imitativo, abilitando la coordinazione del corpo intero. Facilita la raccolta di dati, la simulazione e l'addestramento. I codici QR forniscono accesso a GitHub, Wiki e file di stampa 3D per lo scheletro.

Kit di sviluppo NVIDIA Jetson Orin NX con bracci robotici reComputer J40 e SO-ARM101, che mostrano le statistiche di sistema e l'uso della GPU sul monitor.
Related Collections