









Flywoo GOKU H743 PRO 55A 32Bit 128K 30x30 FC + ESC Stack, 512MB Blackbox, Plug&Play O4/O4 Pro
Flywoo GOKU H743 PRO 55A 32Bit 128K 30x30 FC + ESC Stack, 512MB Blackbox, Plug&Play O4/O4 Pro
FLYWOO
Impossibile caricare la disponibilità di ritiro
Panoramica
Il Flywoo GOKU H743 PRO 55A Stack è un controller di volo e stack ESC 30x30 progettato per costruzioni Plug&Play, inclusa una connessione dedicata per O4 / O4 Pro. Supporta Betaflight, INAV e Ardupilot (APM), e combina un FC basato su STM32H743 con un ESC 55A AM32 4in1 per progetti multi-rotore.
Caratteristiche principali
- MCU STM32H743VIH6 (480MHz Cortex-M7); metriche di prestazione elencate: Flash 2048KB, 2424 CoreMark
- Giroscopio doppio: ICM42688P x2
- Logging blackbox 512MB
- Uscite BEC doppie: 10V 3A e 5V 3A
- 7 porte UART e supporto per uscita PWM a 12 canali; 8 uscite motore per supporto multi-rotore X8
- Supporto per doppia camera e commutazione della doppia camera integrata (PAL/NTSC); la funzione di commutazione della camera è per sistemi video analogici
- Connettori ESC doppi; interfacce per VTX, GPS, ricevitore (RX), buzzer
- ESC supporta AM32, Dshot300 e Dshot600, e frequenza PWM 24k-128k
Specifiche
Controller di volo GOKU H743 PRO
| Obiettivo firmware Betaflight | Flywoo H743PRO |
| Obiettivo firmware INAV | Flywoo H743PRO |
| Obiettivo firmware APM | Flywoo H743PRO |
| MCU | STM32H743VIH6 |
| Core MCU / clock | Cortex-M7 / 480MHz |
| Flash | 2MB (2048KB) |
| Giroscopio | ICM42688P x2 |
| OSD | AT7456E (LGA16) |
| Barometro | DPS310 / SPL06 |
| Blackbox | 512MB |
| UARTS | 1 / 2 / 3 / 4 / 6 / 7 / 8 |
| I2C | 2 |
| PWM | 12 |
| Uscite motore | 8 (supporto multi-rotore X8) |
| Tensione di ingresso | 7.4V-26V / 2-6S LiPo / LiHV |
| BEC | 10V 3A / 5V 3A |
| Supporto per fotocamera | CAM1, CAM2 |
| Dimensioni del controller di volo | 36.5mm x 36.5mm x 8.45mm (altezza inclusa la spina) |
| Fori di montaggio | M3 30x30mm |
| Peso | 9.9g |
GOKU G55M AM32 4in1 ESC
| Firmware | AM32 (AT32DEVF421) |
| Protocol | Dshot300, Dshot600 |
| Frequenza PWM | 24k-128k |
| Tensione di ingresso | 3-6S LiPo |
| Corrente continua | 55A |
| Peso | 15g |
Pinout / Pad etichettati (come indicato nei diagrammi della scheda)
- USB: VUSB, D-, D+, GND
- SPI: MISO, MOSI, SCK, CS1, CS2/SPI3
- CAN: CAN-H, CAN-L, GND (4.5V anche etichettato)
- AIRS, RSSI (+5V e GND etichettati)
- Etichette Camera/Controllo: CAM1, CAM2; CONTROLLO USER2 PD11-CAM; CONTROLLO USER1 PD10-10V
- Altri segnali/pads etichettati includono: BZ-, LED, SUBS, S1-S4, S5-S8, S9-S12, RX1-RX8, TX2-TX8, CUR1, CUR2, SDA1/SCL1, SDA2/SCL2, BAT, GND, 10V, VTX, +5V, 4.5V
Cosa è incluso
- 1 x cavo di connessione FC&cavo di connessione ESC
- 1 x cavo di connessione O4/O4 Pro
- 1 x cavo di connessione buzzer
- 1 x cavo di connessione ricevitore
- 1 x cavo di connessione GPS
- 2 x cavo di connessione camera
- 1 x cavo di connessione VTX analogico
- 1 x cavo di alimentazione XT60
- 9 x palline ammortizzanti M3
- 5 x anelli di gomma M3
- 1 x condensatore
- 5 x perni in nylon
- 5 x dadi antiscivolo
FAQ
- Esiste un firmware dedicato per Betaflight / APM / INAV? Sì. Il nome del firmware è Flywoo H743PRO.
- La compatibilità del firmware è limitata? Supporta firmware open-source tra cui Betaflight, INAV e Ardupilot (APM).
- Come migliorano la stabilità i giroscopi doppi? Il FAQ fornito afferma che i giroscopi ICM-42688P doppi utilizzano la verifica di ridondanza e la compensazione dinamica della temperatura, riducendo la deriva di assetto a ±0,03°/s.
- Quanto tempo supporta la registrazione la memoria del blackbox? Il FAQ fornito afferma che 512MB possono registrare fino a 200 voli, ciascuno della durata di 5 minuti o più.
- Le interfacce della doppia camera sono compatibili con i trasmettitori video mainstream? Le interfacce CAM supportano solo sistemi di trasmissione video analogici o moduli camera con formati PAL/NTSC.
Supporto
Per domande su cablaggio, selezione del firmware o integrazione della costruzione, contattare [email protected] or visita https://rcdrone.top/.
Dettagli

Il Flywoo GOKU H743 Pro 55A stack combina un controller di volo H743 con USB-C e molteplici porte plug-in per un cablaggio pulito e organizzato.

Il controller di volo GOKU H743 PRO utilizza un MCU STM32H743 con giroscopi doppi e supporta fino a 12 canali di uscita PWM per costruzioni flessibili.
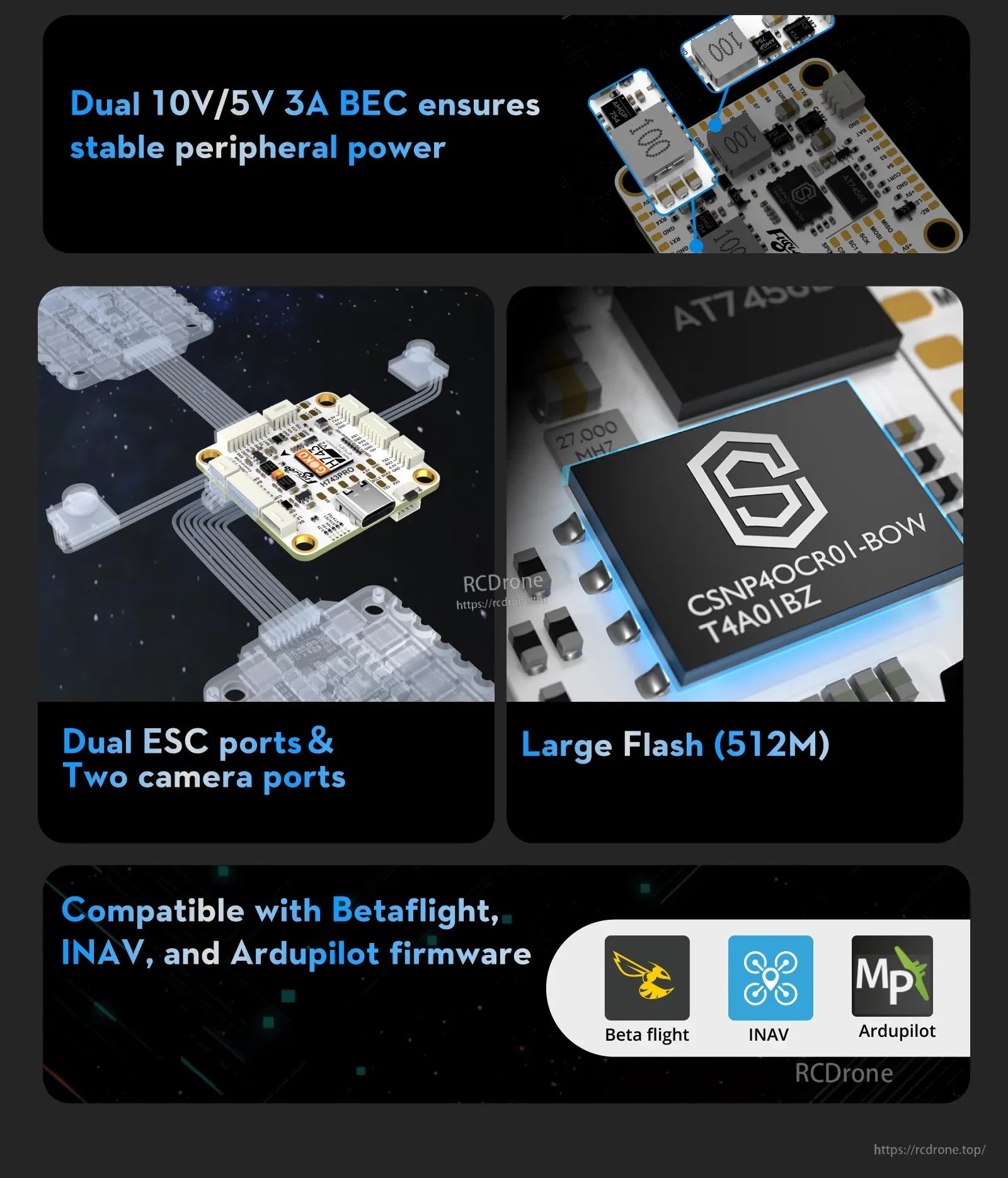
Il controller di volo GOKU H743 Pro include alimentazione BEC duale 10V/5V 3A, connettori ESC doppi, due porte per telecamera e 512M di flash onboard per il logging.

Il controller di volo GOKU H743 PRO utilizza un MCU STM32H743VIH6 con 512MB di flash e giroscopi ICM42688P doppi.

Il stack GOKU H743 PRO elenca 512MB di memoria blackbox, ingresso 7.4–26V (2–6S), BEC 10V/5V 3A e montaggio M3 30x30mm.

Il GOKU G55M AM32 ESC 4-in-1 supporta ingresso LiPo 3–6S, DShot300/600 e corrente continua di 55A in una costruzione da 15g.

Il stack GOKU H743 V2 utilizza un processore Cortex-M7 STM32H743 da 480MHz con 2048KB di flash per un'elaborazione rapida del controllo di volo.

I giroscopi duali ICM42688P utilizzano due sensori indipendenti per la compensazione incrociata per supportare calcoli stabili del controllore di volo.

Il stack GOKU H743 PRO utilizza connettori plug-in etichettati per il cablaggio di DJI O4, GPS, ricevitore, VTX, fotocamera, ESC e buzzer.
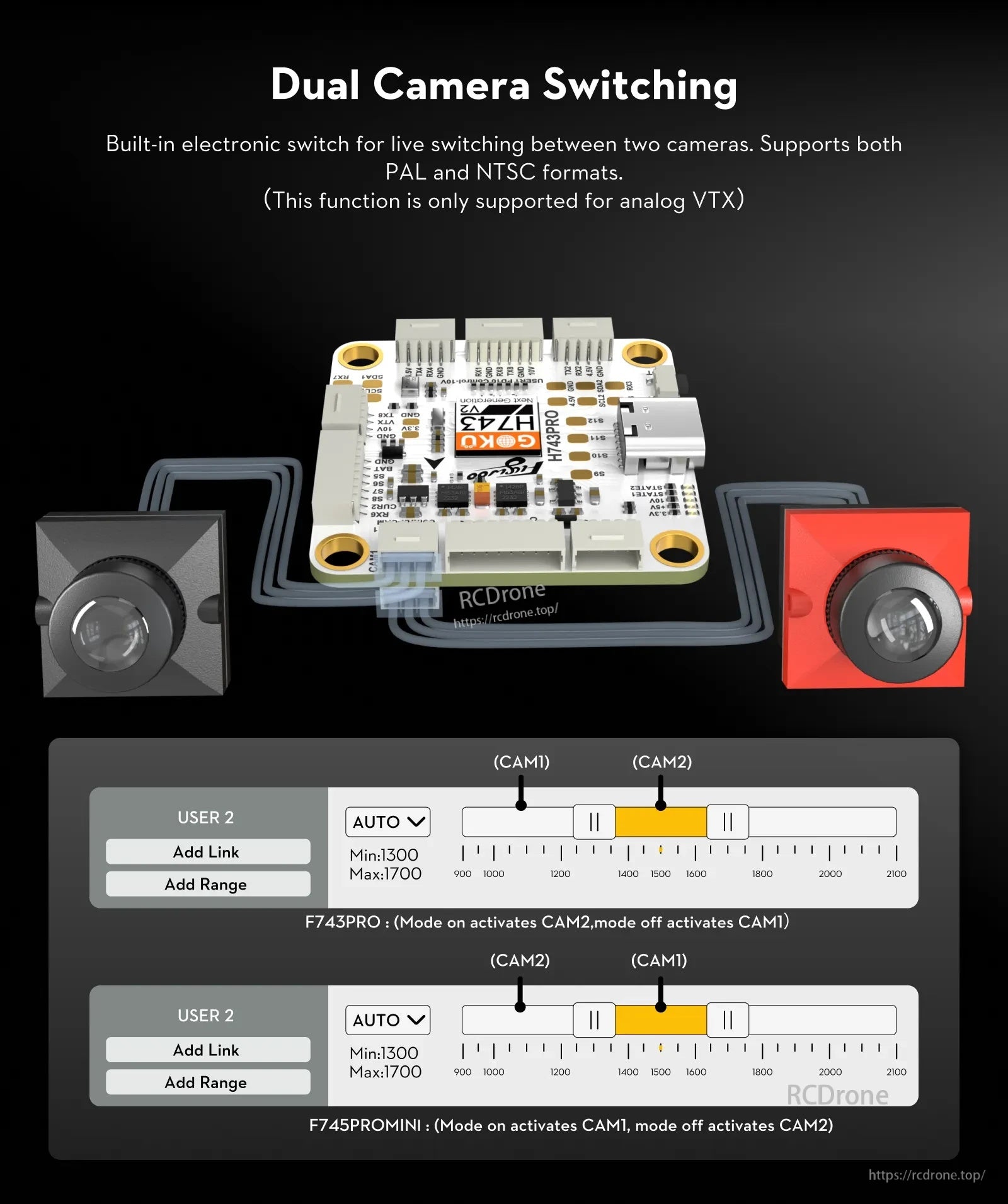
Il GOKU H743 PRO include un interruttore elettronico integrato per il passaggio in tempo reale tra due fotocamere FPV analogiche con supporto PAL/NTSC.

Il stack Flywoo GOKU H743 Pro include un BEC da 10V commutabile che può essere attivato o disattivato tramite un canale di modalità.

Il Flywoo H743PRO supporta opzioni di firmware open-source tra cui Betaflight, INAV e Ardupilot per una configurazione flessibile.

Il stack GOKU H743 Pro utilizza spine chiaramente etichettate per un cablaggio rapido a DJI O4/O4 Pro, fotocamera, ricevitore, GPS/compasso e alimentazione.

Il controller di volo GOKU H743 presenta pad di alimentazione/signal CAM2 chiaramente etichettati e un pinout USB dedicato per un cablaggio semplice.

I pad chiaramente etichettati per UART RX/TX, CAM/VTX, LED/buzzer e le linee di alimentazione 4.5V/5V/10V aiutano a semplificare il cablaggio e la configurazione sullo stack GOKU H743 PRO.
Related Collections









