




MAD MAX10 200A HV 6-12s ESC Brushless Sensored per auto modello RC 1/5
MAD MAX10 200A HV 6-12s ESC Brushless Sensored per auto modello RC 1/5
MAD
Impossibile caricare la disponibilità di ritiro
Panoramica
MAD MAX10 200A HV è un controllore di velocità elettronico (ESC) per auto RC in scala 1/5, che supporta un ingresso LiPo 6–12S e motori brushless con controllo a onda quadra con o senza sensore. Include Bluetooth integrato per la configurazione dei parametri tramite app mobile, lettura dei dati (registro dati e dati in tempo reale) e aggiornamento del firmware.
Caratteristiche principali
- Corrente continua di 200A; limitazione della corrente stile onda per onda per ridurre la corrente di picco e aiutare a evitare danni al motore
- Alimentazione LiPo 6–12S (l'uso dell'alimentazione DC richiede considerazione della capacità di scarica e recupero)
- Trasmissione Bluetooth integrata: connessione diretta all'app mobile per la configurazione dei parametri, lettura dei dati e aggiornamento del firmware
- Funzionalità di registrazione dati in tempo reale integrata (visualizzazione dei dati statici e in tempo reale nell'app)
- Uscita BEC regolabile tramite app mobile: 6.0V / 7.4V / 8.4V; 8A continuo, 25A a breve termine (anche elencato come 8A–25A max / 10–25A max)
- Raffreddamento intelligente: la potenza della ventola si accende a Temperatura > 55°C e si spegne a Temperatura < 50°C; la potenza della ventola può essere disattivata durante un'anomalia di grande corrente
- Capacità di funzionamento in tutte le condizioni atmosferiche: livello di impermeabilità IP67 / grado di protezione
- Temporizzazione turbo disponibile (supporto massimo 26°)
- Supporta il protocollo XC BUS / X.BUS per il controllo in tempo reale e la lettura dei dati operativi tramite bus (utilizzabile per scenari di automazione / controllo robot)
- Funzioni di protezione elencate: bassa tensione, sovratensione, perdita dell'acceleratore, frenata anomala, sovratemperatura, ecc.
Per domande di configurazione o controlli di compatibilità prima dell'acquisto, contattare [email protected] or visitare https://rcdrone.top/.
Specifiche
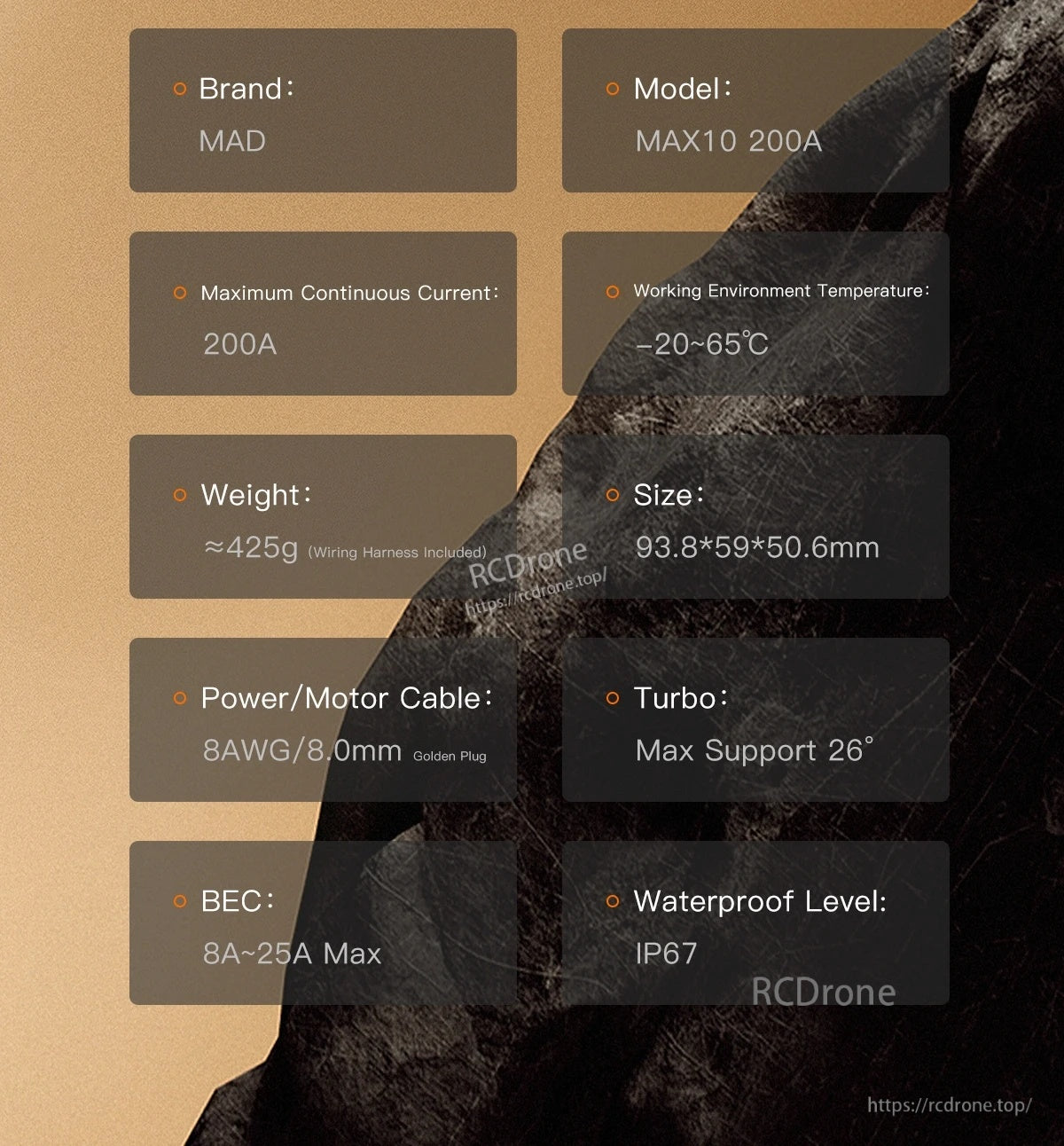
| Marca | MAD |
| Modello | MAX10 200A |
| Corrente continua | 200A |
| Alimentazione | 6–12S LiPo |
| Motore consigliato | Controllo a onda quadra con o senza sensore per motori brushless |
| Nota sulla velocità del motore | Quando le coppie di poli = 1, la velocità elettrica è uguale alla velocità meccanica. Velocità elettrica = Velocità meccanica × Numero di coppie di poli = Valore KV × Tensione del bus × Numero di coppie di poli. Velocità elettrica massima: 240.000 rpm. |
| BEC | Voltaggio: 6.0V / 7.4V / 8.4V (commutabile tramite app mobile). Corrente: 8A continua, 25A a breve termine. (Elencato anche: 8A–25A max / 10–25A max.) |
| Controllo della ventola | Temperatura > 55°C: alimentazione della ventola accesa. Temperatura < 50°C: alimentazione della ventola spenta. La ventola è alimentata da BEC. Se si verifica un corto circuito della ventola, l'alimentazione viene interrotta e ripristinata in 1 secondo. |
| Bluetooth | Regolazione dei parametri dell'app; aggiornamento del firmware; osservazione dei dati di funzionamento del motore (registro dati e dati in tempo reale) |
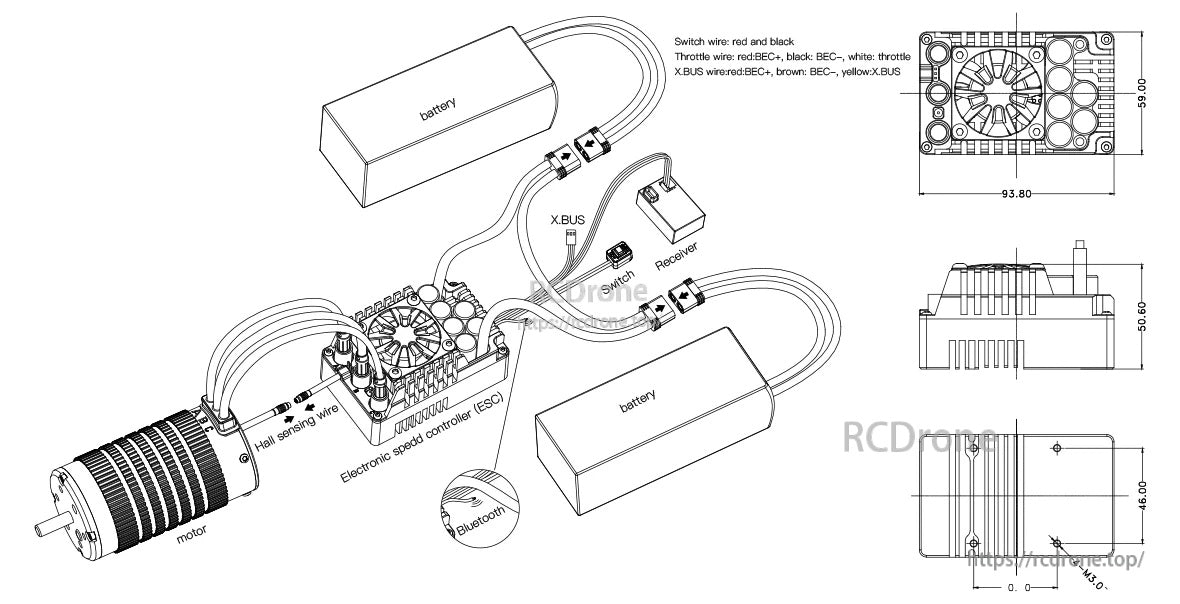
| Dimensioni | 93.80(L) × 59.00(W) × 50.60(H) mm (anche indicato come 93.8 × 59 × 50.6 mm) |
| Peso | ≈406 g (con cavo) / ≈425 g (con cablaggio incluso) |
| Temperatura ambiente di lavoro | -20 a 65°C |
| Turbo | Supporto massimo 26° |
| Livello di impermeabilità | IP67 |
| Cavo di alimentazione/motore | 8AWG / 8.0 mm Spina Dorata |
Caratteristiche (Dettagliate)
- Schema di commutazione meticolosamente provato; commutazione fluida anche in condizioni non induttive
- La tecnologia di freewheeling attivo riduce il riscaldamento del MOS evitando impulsi di corrente eccessivi
- Il limitatore di corrente in ogni ciclo PWM riduce l'impatto della corrente impulsiva sul motore
- La dissipazione del calore intelligente aiuta a garantire che la ventola funzioni silenziosamente a basse temperature
- Connessioni Bluetooth integrate all'app mobile per la gestione dell'hardware e la configurazione dei parametri
- Interfaccia di osservazione dei dati dell'app mobile per la registrazione dei dati ESC (dati statici) e dati di debug in tempo reale
- Circuito di conversione DC ad alta potenza per alta capacità di carico BEC
- Funzioni di protezione elencate: bassa tensione, sovratensione, perdita di acceleratore, frenata anomala, surriscaldamento, ecc.
- Temporizzazione turbo disponibile
- Non è necessario acquistare moduli aggiuntivi (controller di velocità pronto all'uso come descritto)
- Supporta il protocollo XC BUS: controllo in tempo reale dell'ESC e lettura dei dati operativi tramite bus; può essere utilizzato per il controllo di robot o altri controlli di programmazione automatizzati
Collegamenti (Note sul cablaggio)
- Filo dell'interruttore: rosso e nero
- Filo dell'acceleratore: rosso = BEC+, nero = BEC-, bianco = acceleratore
- X.BUS filo: rosso = BEC+, marrone = BEC-, giallo = X.BUS
- Il collegamento del filo di rilevamento Hall è utilizzato quando si esegue un'impostazione con sensore
Elementi configurabili (Parametri dell'app)
| Seq | Elemento | Intervallo/Opzioni | Predefinito |
| 1 | Modalità di funzionamento | Avanti con freno / Avanti & Retromarcia e Freno / Avanti con retromarcia | Avanti & Retromarcia e Freno |
| 2 | Cellule Lipo | Auto / 6–12S | Auto |
| 3 | Tensione BEC | 6.0V / 7.4V / 8.4V | 6V |
| 4 | Tensione di Cutoff | Disabilitato / 2.9–3.6V | 3.2V |
| 5 | Rotazione del Motore | Avanti / Indietro | Avanti |
| 6 | Forza Massima di Frenata | 0–100% | 60% |
| 7 | Massimo Forza Inversa | 0–100% | 25% |
| 8 | Pugno | 0–12 livello | 6 livello |
| 9 | Forza di Freno di Trascinamento | 0–100% | 0% |
| 10 | Tempi Turbo | 0–26 gradi | 26 gradi |
| 11 | Ritardo Turbo | 0–1 s | 1 s |
| 12 | PWM Iniziale | 1–10% | 5% |
| 13 | Coppie di Poli del Motore (voce 13) | 2–15% | 10% |
| 14 | Coppie di Poli del Motore (voce 14) | 1–64 | 2 |
| 15 | BUS di Comunicazione | X.BUS Protocollo | X.BUS Protocollo |
| 16 | X.BUS-ID | 0–15 | 0 |
Regola di denominazione Bluetooth
Formato del nome Bluetooth: "modello approssimativo" + "-" + "ID codice ESC".Esempio: "XC_E3-1C89" dove XC_E3 è il modello approssimativo e "1C-89" è l'ID del codice esadecimale dell'ESC. Se il nome Bluetooth viene modificato dall'utente, l'ID del codice ESC viene comunque mantenuto per evitare due dispositivi con lo stesso nome.
Precauzioni
- Non collegare i fili di ingresso dell'ESC DC+ e DC- in modo inverso; il collegamento inverso potrebbe danneggiare l'ESC. Se l'ESC viene danneggiato in questo caso, il servizio di garanzia pertinente non sarà fornito.
- Se viene utilizzato un sensore Hall, controllare i fili di fase del motore e il cablaggio Hall.
- Per i motori senza sensori di temperatura, un funzionamento prolungato ad alta potenza può causare bruciature.
- Al alcune strutture meccaniche del motore non possono supportare alte velocità; forzare una velocità superiore può danneggiare il motore.
- Se non utilizzato per più di 1 ora, scollegare i fili di alimentazione dell'ESC.
- Se vengono modificate delle linee di collegamento, controllare attentamente il circuito prima dell'uso.Aprire lentamente l'acceleratore per confermare che non ci siano errori prima del funzionamento normale.
Processo di Avvio
- Controllare se il circuito è aperto, in cortocircuito o in cattivo contatto.
- Controllare se il motore è bloccato.
- Collegare il cavo di alimentazione.
- Accendere il pulsante di alimentazione. Quando si sente il tono di avviso della batteria (descritto nel messaggio di avvio normale nella sezione avviso luminoso/sonoro), l'avvio è normale. Se l'acceleratore è normale, l'operazione dell'acceleratore può procedere normalmente.
Impostare l'Intervallo dell'Acceleratore (Procedura)
- Mantenere l'ESC spento. Spostare l'acceleratore al punto finale di inversione. Accendere l'ESC e attendere che le luci rossa e verde smettano di lampeggiare (circa 5 s).
- Spostare l'acceleratore al punto finale di avanzamento entro 1 s e tenerlo, quindi attendere che la luce verde smetta di lampeggiare.
- Sposta l'acceleratore nella posizione neutra entro 1 s e tienilo, poi aspetta che la luce rossa smetta di lampeggiare.
- Il prompt di successo si ripete quattro volte: luce rossa e luce verde accese + segnale acustico del motore "so, mi, do" + luci rossa/verde spente + 0,2 s di vuoto. Impostazione di errore: nessun segnale; l'ESC si accende.
Ripristina i parametri di fabbrica
Ripristina il Bluetooth alle impostazioni di fabbrica
- Collega il cavo ESC (il cavo bianco) a BEC+ (cavo rosso).
- Accendi l'ESC.
- Disconnetti da BEC quando la luce verde è spenta e la luce rossa è accesa.
- Rimuovi il cortocircuito.
Quando il boot è attivato, lo stato del Bluetooth ripristina il valore di fabbrica (password ripristinata a 1234 e nome ripristinato allo stato di fabbrica). Riavvia l'ESC. Se c'è un errore hardware, il Boot può essere attivato in questo modo per aggiornare l'hardware.
Ripristina i parametri alle impostazioni di fabbrica
Utilizza il pulsante Predefinito nella pagina dei parametri dell'app.
Stato LED & Istruzioni Beep
| Categoria | Descrizione del tipo | Segnale luminoso | Segnale acustico | Osservazione |
| Informazioni di base | Acceleratore non azzerato | Luce rossa lampeggia rapidamente | Tono lungo "beep" | Luce rossa lampeggia rapidamente |
| Informazioni di base | Segnale dell'acceleratore perso | Luce rossa lampeggia lentamente | Tono lungo "beep" | In ciclo di 2 s |
| Rilevamento della tensione | Protezione da bassa tensione | (Rosso x1, Verde x2) … | Tono lungo "beep" x1, tono breve "beep" x2 | Controllare la tensione di ingresso o l'impostazione del numero di celle se non c'è "beep" prima del rilevamento MOSFET. |
| Rilevamento della tensione | Protezione da sovratensione | (Rosso x1, Verde x3) … | Nessuno | La tensione è troppo alta; controlla se la tensione supera il valore di resistenza dell'ESC. |
| Temperatura | Temperatura MOS troppo alta (operativa > 125°C / avvio > 110°C) | (Rosso x1, Verde x4) … | Beep lungo x1, beep corto x4 | L'ESC può riprendere il normale funzionamento quando la temperatura scende sotto i 100°C. |
| Temperatura | Temperatura del condensatore troppo alta (operativa > 105°C / avvio > 100°C) | (Rosso x1, Verde x5) … | Beep lungo x1, beep corto x5 | L'ESC può riprendere il normale funzionamento quando la temperatura scende sotto i 100°C. |
| Parametri dell'acceleratore | Parametri dell'acceleratore anomali | (Rosso x1, Verde x7) … | Beep lungo x1, beep corto x7 | Se il messaggio anomalo persiste dopo aver posizionato l'acceleratore su neutro, avvia la calibrazione dell'acceleratore. |
| Anomalia di rilevamento Hall | Anomalia della logica di uscita Hall | (Rosso x1, Verde x8) … | Beep lungo x1, beep corto x8 | Ricollegare il cavo Hall. Se l'anomalia persiste, potrebbe essere un problema del Hall del motore; scollegare il cavo Hall. |
| Messaggio di calibrazione dell'acceleratore | Calibra la gamma bassa | (Rosso Verde) … | Nessuno | Se la calibrazione è irregolare/insuccesso, l'ESC esce dalla calibrazione e entra nella normale accensione. |
| Messaggio di calibrazione dell'acceleratore | Calibra l'intervallo alto | (Verde) … | Nulla | |
| Messaggio di calibrazione dell'acceleratore | Calibra l'acceleratore neutro | (Rosso) … | Nulla | |
| Messaggio di calibrazione dell'acceleratore | Calibrazione riuscita | (Rosso Verde) x4 | (do-re-mi) x4 | |
| Funzionamento normale | Tutto normale e nessuna azione sull'acceleratore | (Verde) … | Nulla | |
| Funzionamento dell'acceleratore | Normale | Maggiore è l'acceleratore, più veloce lampeggia la luce verde | Nulla | |
| Funzionamento dell'acceleratore | Il tempo del turbo è attivo | La luce verde rimane accesa | Nulla | |
| Frenata | Frenata | La luce rossa è accesa | Nessuno | La luce rossa si spegne quando si rilascia il freno |
| Avvio | Accesso forzato all'avvio | Nessuno | Seguire il processo di ripristino di fabbrica Bluetooth | |
| Avvio | Avvio in corso | Luce verde: accesa 2 s & spenta 2 s; la luce rossa rimane lampeggiante | Nessuno | La durata della luce rossa accesa è pari al tempo dell'operazione di lampeggio |
| Avvio normale | Messaggio di conteggio delle celle della batteria dopo l'avvio normale | Segnale luminoso di avviso quaternario: tono lungo con luce rossa accesa; tono breve con luce verde accesa | do, mi, so + suono di avviso quaternario | Definizione quaternaria: tono lungo = 5 celle; tono breve = 1 cella.Esempio per 8S: do, ri, mi + tono lungo x1 + tono corto x3. |
| Avviso di guasto | Autotest anomalia MOS: circuito aperto MOS | (Rosso x2) … | Nessuno | Disconnettere il filo del motore. Se le anomalie persistono, l'ESC necessita di ispezione. |
| Avviso di guasto | Autotest anomalia MOS: cortocircuito MOS | (Rosso x2, Verde x1) … | Nessuno | |
| Avviso di guasto | Circuito di campionamento della corrente anomalo | (Rosso x2, Verde x2) … | Nessuno |
Note:
1) La luce rossa corrisponde al tono lungo; la luce verde corrisponde al tono corto.
2) Per risparmiare energia, tutti i beep durano 5 minuti; se i guasti si risolvono, entra in vigore di nuovo nei successivi 5 minuti.
3) I puntini di sospensione "..." nel segnale luminoso rappresentano la ripetizione dell'azione precedente.
Calibrazione dell'acceleratore (Video)
Dettagli






Related Collections




