



Motore SteadyWin DD5015 24V 30rpm RS485/CAN Encoder Assoluto Monogiro 14bit 173g
Motore SteadyWin DD5015 24V 30rpm RS485/CAN Encoder Assoluto Monogiro 14bit 173g
SteadyWin
Prezzo di listino
$138.00 USD
Prezzo di listino
Prezzo scontato
$138.00 USD
Prezzo unitario
per
Imposte incluse.
Spese di spedizione calcolate al check-out.
Impossibile caricare la disponibilità di ritiro
Panoramica
Il motore SteadyWin DD5015 è un motore compatto con comunicazione RS485 / CAN e un encoder assoluto a giro singolo (14bit). È progettato per casi d'uso in robotica e automazione dove sono richiesti output controllati a bassa velocità e feedback.
Per supporto all'integrazione e domande pre-vendita, contattare https://rcdrone.top/ o inviare un'email a [email protected].
Applicazioni
- Robot umanoidi
- Bracci robotici
- Eseoscheletri
- Robot quadrupedi
- Veicoli AGV
- Robot ARU
Specifiche
| Voltaggio nominale | 24V |
| Intervallo di tensione | 10~28V |
| Corrente nominale | 1.2A |
| Potenza nominale | 28.8W |
| Momento torcentale nominale | 0.48N.M |
| Velocità nominale | 30rpm |
| Velocità massima a vuoto | 526 rpm |
| Coppia di picco | 0.58 N.m |
| Corrente di picco | 1.63A |
| Costante di velocità | 21.92 rpm/v |
| Costante di coppia | 0.33N.M/A |
| Numero di coppie di poli | 14Pairs |
| Resistenza di fase | 4.9Ω |
| Induttanza di fase | 2.046Mh |
| Comunicazione | RS485 / CAN |
| Tipo di encoder | Assoluto a giro singolo |
| Risoluzione | 14bit |
| Peso del motore | 173g |
| Temperatura di lavoro | -20~80°C |
Dettagli meccanici / Interfaccia (dallo schema)
- Marcatura del modello: DD5015
- Diametro del corpo: Ø49±0.1
- Diametro del coperchio finale: Ø42
- Schema di montaggio: 4-M3 profondità 4.5 (mostrato sui modelli Ø20 e Ø42)
- Lunghezze delle chiavi: 34±0.1 lunghezza totale; segmenti 13 e 20.5
- Caratteristiche centrali: Ø5; Ø13.6 (+0.05/0); Ø12.6 (+0.1/0) con profondità 16.7
- Connettore: SH1.0-8PIN
- Etichette dei pin: 485_A, 485_B, CAN_H, CAN_L, GND, GND, VCC, VCC
Documenti
Dettagli
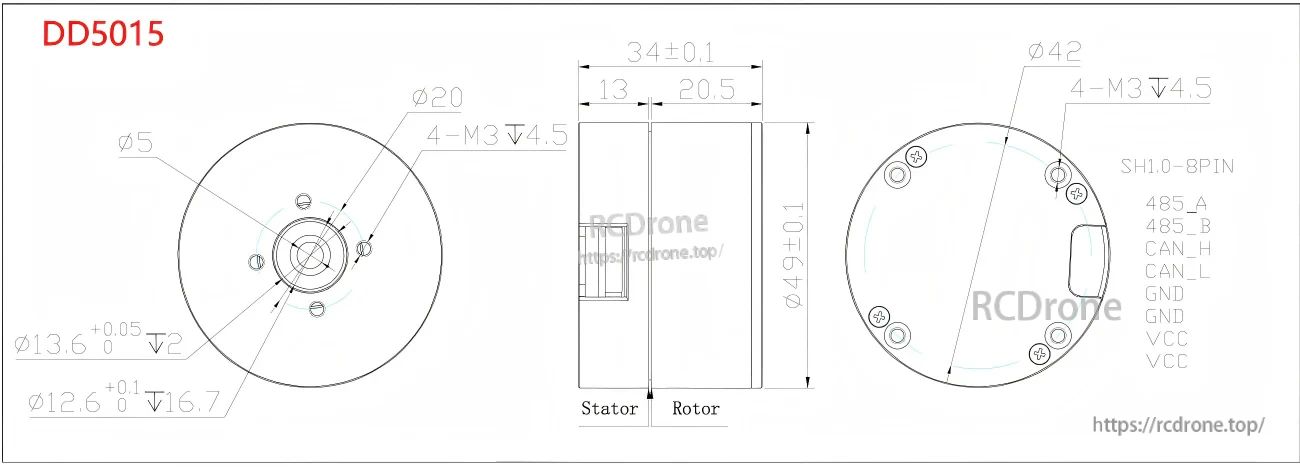
Le dimensioni di montaggio e il pinout del connettore SH1.0 a 8 pin per il cablaggio RS485/CAN sono forniti per la pianificazione dell'integrazione.
Related Collections



