



Motore SteadyWin GB4310 24V con opzione encoder AS5048A/AS5600, 504RPM nominali, coppia 0,2N·m
Motore SteadyWin GB4310 24V con opzione encoder AS5048A/AS5600, 504RPM nominali, coppia 0,2N·m
SteadyWin
Impossibile caricare la disponibilità di ritiro
Panoramica
Il motore SteadyWin GB4310 è un motore da 24V progettato per applicazioni di robotica e controllo del movimento. Supporta opzioni di encoder AS5048A/AS5600 ed è compatibile con encoder a 12 bit e 14 bit. È compatibile con anelli di scorrimento, con prestazioni stabili a basse velocità per gimbal e pod.
Caratteristiche principali
- Modello: GB4310
- Voltaggio nominale: 24V
- Tipo di encoder: AS5048A/AS5600
- Compatibile con encoder a 12 bit e 14 bit
- Compatibile con anelli di scorrimento; stabile a basse velocità
Specifiche
| Parametro | Valore |
|---|---|
| Modello | GB4310 |
| Voltaggio Nominale | 24V |
| Momento Torcentale Nominale | 0.2 N·m |
| Velocità nominale | 504 RPM |
| Velocità massima | 1028 RPM |
| Corrente nominale | 0.9 A |
| Momento di stallo | 0.49 N·m |
| Corrente di stallo | 1.9 A |
| Giri di avvolgimento del motore | 60T |
| Resistenza di fase | 10.32 Ω |
| Induttanza di fase | 3.26 Mh |
| Costante di velocità | 34.4 rpm/v |
| Costante di coppia | 0.23 N.M/A |
| Inerzia del rotore | 202 gcm^2 |
| Numero di coppie di poli | 14 Coppie |
| Peso del motore senza encoder | 112 g |
| Peso del motore con encoder | 128 g |
| Temperatura massima di smagnetizzazione | 120 °C |
| Temperatura di lavoro | 20~80 °C |
| Tipo di encoder | AS5048A/AS5600 |
Dimensioni meccaniche (da disegno)
| Voce | Valore |
|---|---|
| Con alloggiamento encoder: fori di montaggio | 4-M3 |
| Con alloggiamento encoder: cerchio di bulloni / caratteristica | φ30 |
| Con alloggiamento encoder: spessore | 24 ±0.2 |
| Con alloggiamento dell'encoder: diametro esterno | φ49 ±0.05 |
| Con alloggiamento dell'encoder: fori di montaggio (lato opposto) | 8-M3 |
| Con alloggiamento dell'encoder: cerchio di bulloni / caratteristica | φ25, φ22 |
| Con alloggiamento dell'encoder: caratteristica centrale | φ12.6 |
| Senza alloggiamento dell'encoder: fori di montaggio | 4-M2.5; 3-M2 |
| Senza alloggiamento dell'encoder: marcature del diametro | φ38.5; φ27.5; φ5 |
| Senza alloggiamento dell'encoder: spessore | 18 ±0.2 |
| Senza alloggiamento dell'encoder: diametri scalati | φ16.1; φ7.9 -0.05 |
| Senza alloggiamento dell'encoder: marcature del diametro | φ47 ±0.05; φ49 ±0.05 |
| Senza alloggiamento dell'encoder: fori di montaggio (lato opposto) | 8-M3 |
| Senzo alloggiamento dell'encoder: cerchio di bulloni / caratteristica | φ25, φ22 |
| Senzo alloggiamento dell'encoder: caratteristica centrale | φ12.6 |
Applicazioni
- Robot umanoidi
- Bracci robotici
- Eseoscheletri
- Robot quadrupedi
- Veicoli AGV
- Robot ARU
- Gimbal e pod (notati)
Manuali / File CAD
Per supporto pre-vendita e integrazione, contattare [email protected] or visita https://rcdrone.top/.
Dettagli
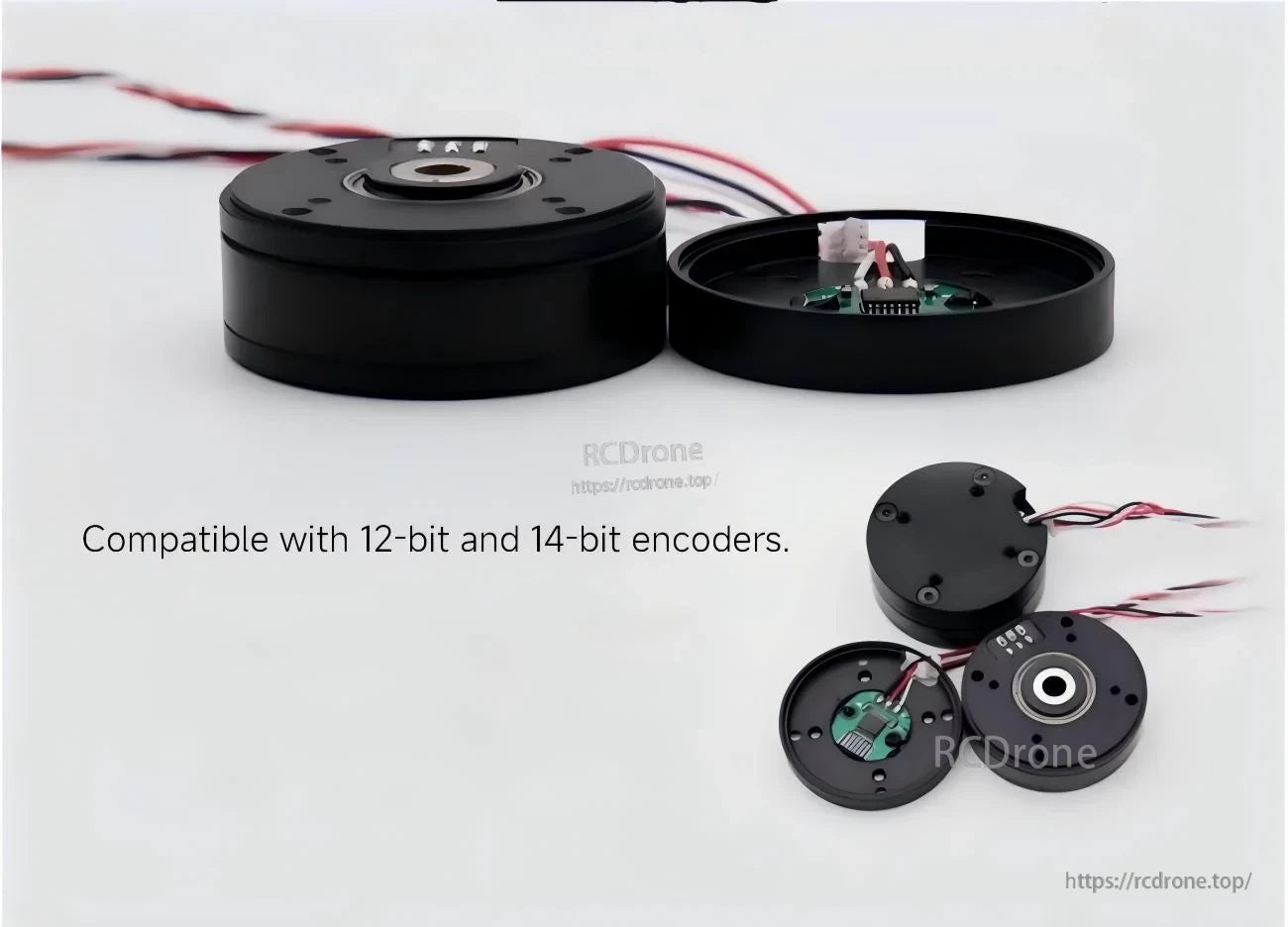
Il design del motore GB4310 pronto per l'encoder supporta le opzioni AS5048A/AS5600 e una risoluzione dell'encoder di 12 bit o 14 bit per un feedback preciso.

La costruzione compatibile con anelli striscianti è adatta a gimbal, pod e altre costruzioni di controllo del movimento che necessitano di un funzionamento stabile a bassa velocità.
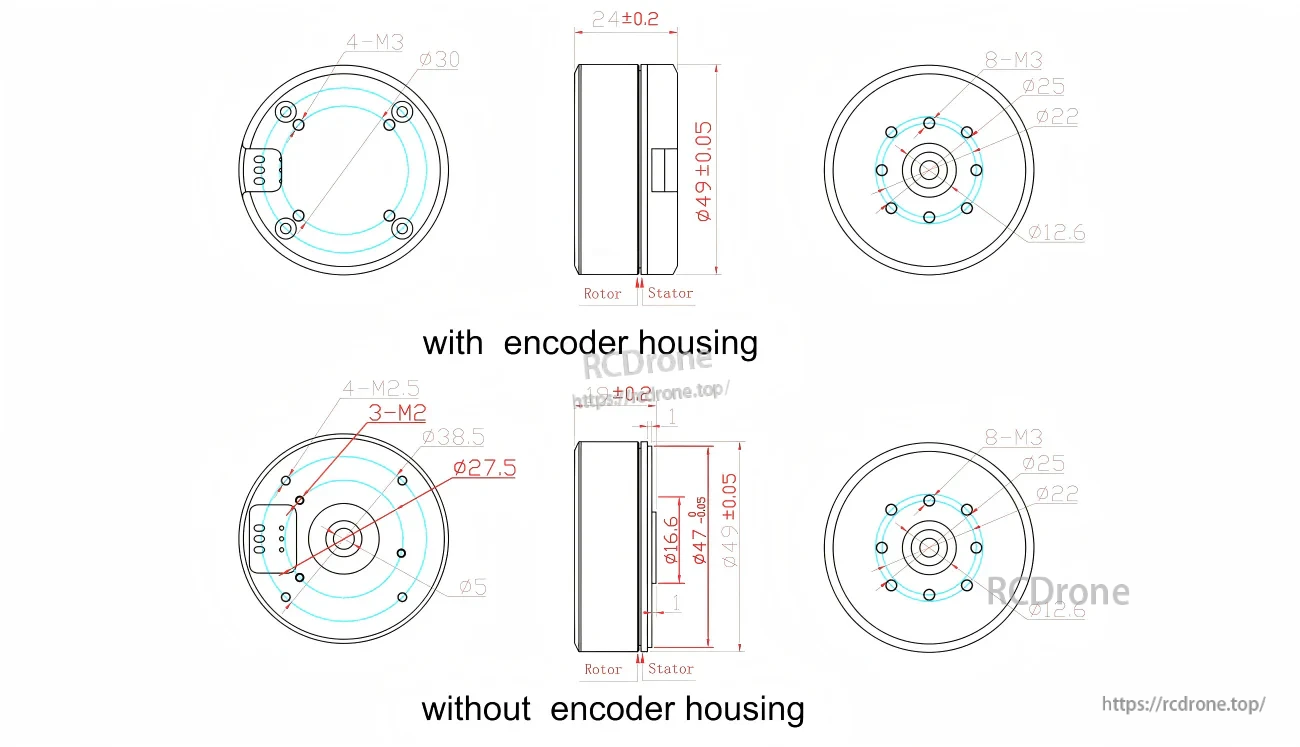
Utilizza i modelli dei fori di montaggio, i cerchi di bulloni e le indicazioni di spessore per abbinare le tolleranze del tuo supporto e della tua custodia.
Related Collections



