SteadyWin GIM4305-10 Motore Riduttore Planetario — 48W, Rapporto 10:1, Coppia Nominale 1 N·m, 300–366 RPM, CAN, IP54 per Attuatori Robotici
SteadyWin GIM4305-10 Motore Riduttore Planetario — 48W, Rapporto 10:1, Coppia Nominale 1 N·m, 300–366 RPM, CAN, IP54 per Attuatori Robotici
SteadyWin
Impossibile caricare la disponibilità di ritiro
Panoramica
Il motore riduttore planetario SteadyWin GIM4305-10 è un motore riduttore planetario compatto con un driver SDC101 integrato e comunicazione CAN. Progettato per attuazione di precisione, l'unità opera a una tensione nominale di 24V (intervallo 12-36V), eroga 48W di potenza e fornisce una coppia nominale di 1 N·m (coppia di stallo 3.47 N·m) dopo una riduzione 10:1. Il GIM4305-10 è classificato IP54 e supporta un encoder a 14 bit e connessione separata dell'encoder; è disponibile supporto per freni personalizzati. Le protezioni integrate includono monitoraggio di sovratemperatura, sovratensione e sovraccarico.
Per assistenza clienti e supporto tecnico contattare: [email protected] o visitare https://rcdrone.top/.
Caratteristiche principali
- Riduttore a ingranaggi planetari, rapporto 10:1 per aumentare la coppia di uscita e il controllo posizionale.
- Driver SDC101 integrato con comunicazione CAN per controllo in rete.
- Velocità nominale dopo la riduzione 300 RPM, massima 366 RPM.
- Encoder: incorporato a 14 bit, supporta l'ingresso dell'encoder separato.
- Involucro compatto Ø53×26mm e bassa massa (140g senza driver; 150g con driver).
- Valutazioni meccaniche: carico assiale massimo 125N, carico radiale massimo 500N, gioco del riduttore 15 arcmin.
- Intervallo di temperatura di funzionamento -20°C a +80°C e rumore acustico <60 dB.
- Materiale del riduttore: ALU o ACCIAIO. Supporto freno personalizzato disponibile.
Specifiche
| Modello | GIM4305-10 |
| Modello Driver | SDC101 |
| Voltaggio Nominale | 24V (intervallo 12-36V) |
| Potenza | 48W |
| Momento Torcentale Nominale (dopo riduzione) | 1 N·m |
| Momento di Stallo | 3.47 N·m |
| Velocità Nominale (dopo riduzione) | 300 RPM |
| Velocità Massima (dopo riduzione) | 366 RPM |
| Corrente Nominale | 2A |
| Corrente di Blocco | 5.6A |
| Resistenza di Fase | 1.15 Ω |
| Induttanza di Fase | 0.41 mH |
| Costante di Velocità | 15.25 rpm/v |
| Costante di Coppia | 0.62 N·m/A |
| Numero di coppie di poli | 14 coppie |
| Rapporto di trasmissione | 10:1 |
| Tipo di ingranaggio | Planetario |
| Materiale dell'ingranaggio riduttore | ALU o ACCIAIO |
| Gioco dell'ingranaggio riduttore | 15 arcmin |
| Peso del motore (senza driver) | 140 g |
| Peso del motore (con driver) | 150 g |
| Dimensioni (senza driver) | Ø53×26 mm |
| Dimensioni (con driver) | Ø53×26 mm |
| Carico assiale massimo | 125 N |
| Carico radiale massimo | 500 N |
| Rumore | <60 dB |
| Comunicazione | CAN |
| Secondo encoder | NO |
| Grado di protezione | IP54 |
| Temperatura di funzionamento | -20°C a +80°C |
| Risoluzione dell'encoder | 14 Bit |
| Supporto encoder separato | SÌ |
| Supporto freno personalizzato | SÌ |
Applicazioni
- Robot umanoidi e giunti robotici
- Bracci robotici e moduli di attuazione
- Eseoscheletri e dispositivi assistivi indossabili
- Robot quadrupedi e giunti delle gambe
- Moduli di guida AGV e robotica mobile
- Progetti di robotica open-source (e.g., integrazione Pupper V3)
Manuali
- Diagramma di installazione GIM4305-10SHS (PDF)
- Schema del'interfaccia motore GIM4305 (PDF)
- SteadyWin_GIM4305_10.stp
Dettagli
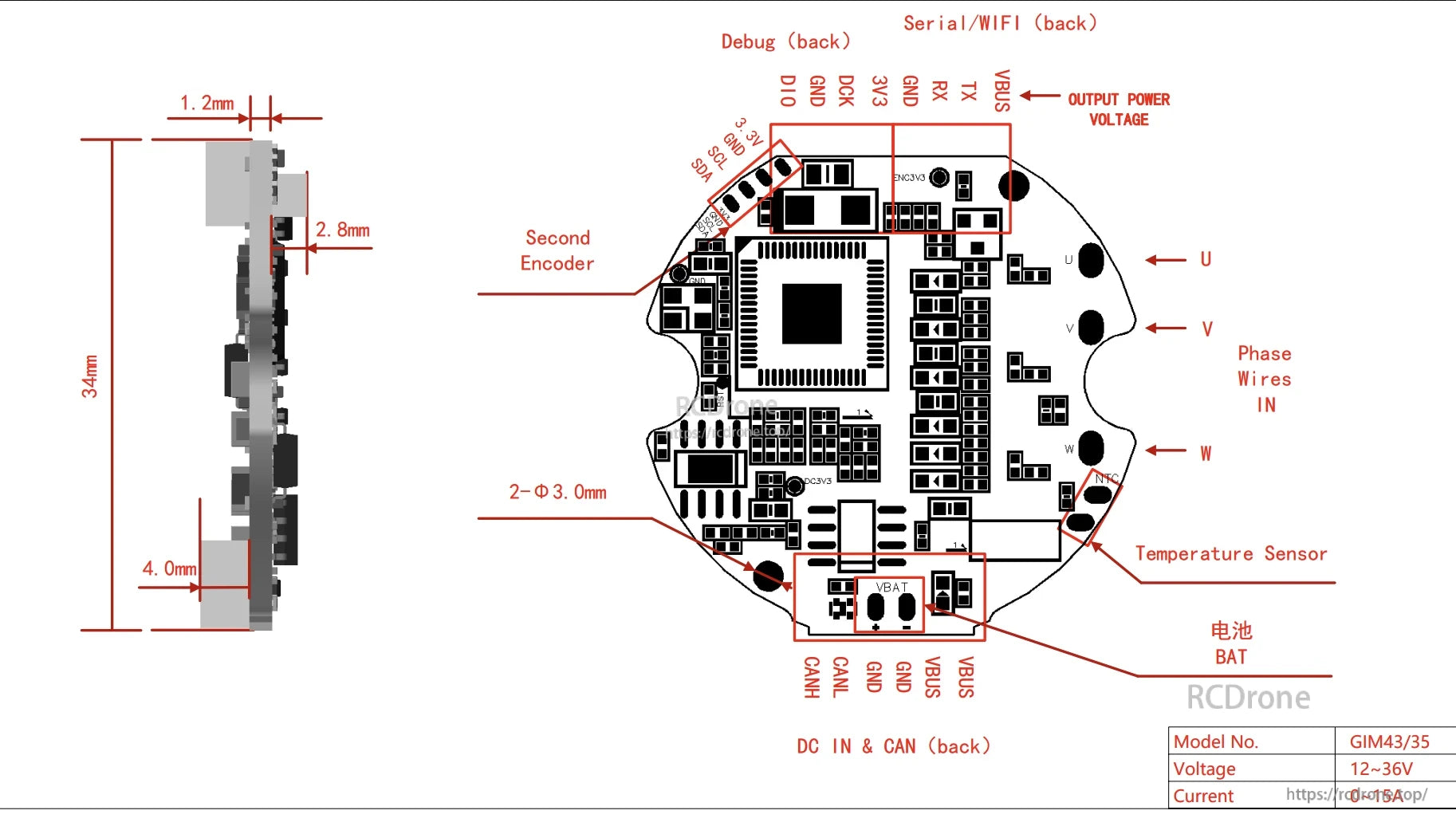
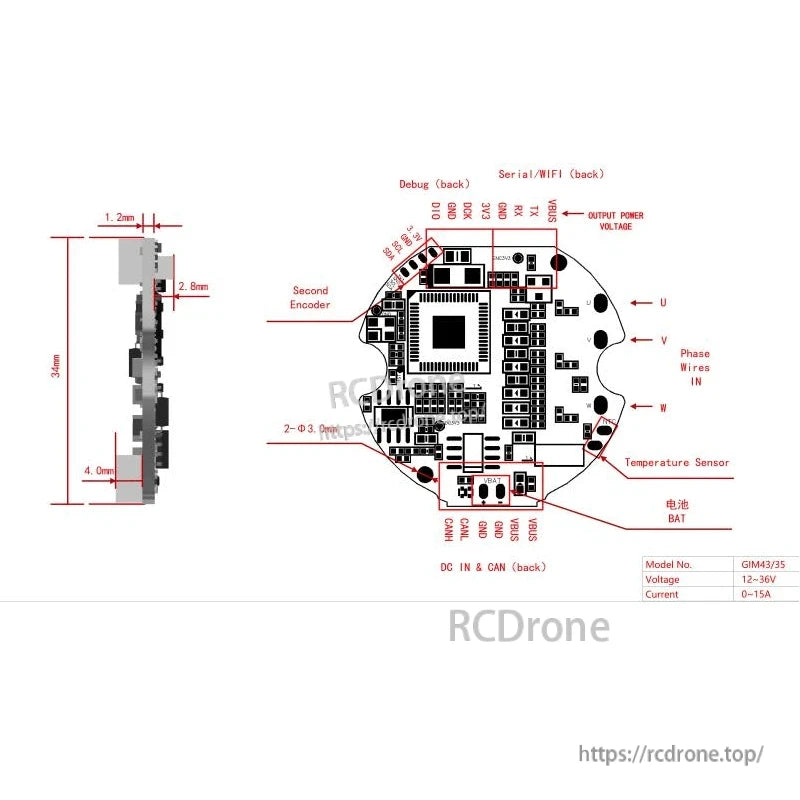
SteadyWin Il diagramma PCB del motore GIM43/35 mostra connessioni, dimensioni e componenti—encoder, fili di fase, sensore di temperatura, ingresso batteria, porte di debug—operando a 12–36V e corrente 0–15A.
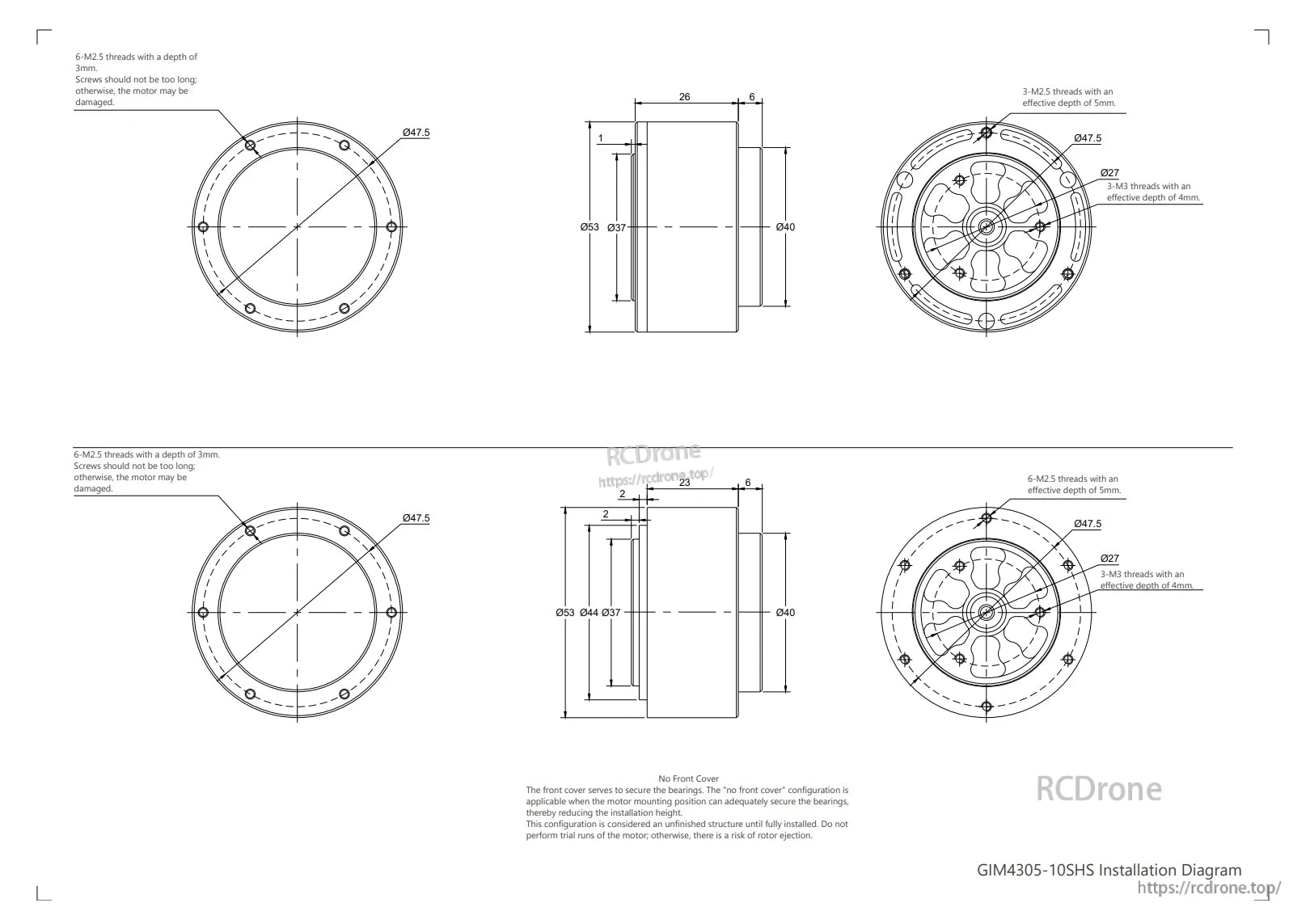
Il diagramma tecnico per l'installazione del motore GIM4305-10SHS mostra dimensioni, specifiche del filetto, avvertenze sulla lunghezza delle viti per prevenire danni e configurazioni con e senza copertura frontale.
Related Collections