Drone di ricerca SU17 - Sviluppo di droni industriali open source PX4 con LiDAR MID-360, SLAM quad-camera, EGO-Swarm
Drone di ricerca SU17 - Sviluppo di droni industriali open source PX4 con LiDAR MID-360, SLAM quad-camera, EGO-Swarm
RCDrone
Impossibile caricare la disponibilità di ritiro
Panoramica
Il drone da ricerca SU17 è un quadricottero ad alte prestazioni dotato di un Batteria da 6000 mAh, LiDAR MID-360 per la mappatura 3D, sistema SLAM a quattro telecamere per una localizzazione precisa e integrata Posizionamento GPS+GLONASSCon un peso al decollo di 2,3 kg e un capacità di carico utile di 200 g, offre 21 minuti di volo in modalità di posizionamento visivo. Basato sul software Prometheus, supporta il riconoscimento del target, la pianificazione del percorso e la navigazione autonoma, rendendolo un di livello industriale soluzione per la ricerca e l'innovazione.
Parametri hardware
Aereo
| Parametro | Descrizione |
|---|---|
| Tipo di aeromobile | Quadricottero |
| Peso al decollo (circa) | 2,3 kg (con custodia protettiva e batteria) |
| Distanza diagonale | 320 millimetri |
| Dimensioni | Lunghezza: 442 mm, Larghezza: 388 mm, Altezza: 174 mm (esclusa la copertura protettiva) |
| Carico utile massimo | 200 grammi |
| Tempo di volo stazionario | Circa 13 min (con hovering al 100%, non sotto lo 0%), posizionamento visivo: 21 min |
| Precisione in hovering | GPS: Verticale ±1,5 m, Orizzontale ±2,0 m |
| 3D LiDAR SLAM: Verticale ±0,08 m, Orizzontale ±0,08 m | |
| SLAM visivo a 4 telecamere: verticale ±0,05 m, orizzontale ±0,05 m | |
| Livello di resistenza al vento | Livello 4 |
| Temperatura di esercizio | -10°C a 40°C |
| Chip MCU principale | STM32H743 |
| IMU | Codice articolo: ICM42688/BMI088 |
| Barometro | MS5611 |
| Bussola | Modello QMC5883L |
| Interfaccia | USB di tipo C |
Computer di bordo
| Parametro | Descrizione |
|---|---|
| Processore | Processore Intel Core i5-8365U |
| Capacità di memoria | 8 GB |
| Frequenza di memoria | LPDDR3@2133MHz |
| Magazzinaggio | SSD NVMe da 256 GB |
| Porta di rete | Baidu Apollo Ethernet X2, 12V@3A power fornitura, supporta IEEE 1588-2008 (PTP v2) |
| Porta seriale | Porta seriale TTL X2, 5V/3.3V@500mA power fornitura |
| USB | Tipo-C X2 (1x USB2.0, 1x USB3.0) |
| Cavo HDMI | Uscita HDMI 1.4 |
Batteria di potenza
| Parametro | Descrizione |
|---|---|
| Modello | SU17-L |
| Tipo di batteria | Batteria ai polimeri di litio ad alta pressione |
| Tensione nominale | 26,4 V (massimo), 21 V (minimo) |
| Tensione di accumulo | 22,8 V (tipico) |
| Capacità nominale | 6000mAh |
| Peso | Peso: 680 grammi |
| Dimensioni | Lunghezza: 85,2 mm, Larghezza: 86.5 mm, Altezza: 135 mm |
Controllo remoto
| Parametro | Descrizione |
|---|---|
| Modello | QE-2 |
| Canali | 8 |
| Potenza di trasmissione | Da 18 a 20 dBm |
| Peso | 294,1 grammi |
Giunto cardanico
| Parametro | Descrizione |
|---|---|
| Angolo controllabile | -90° ~ 30° (asse di inclinazione) |
| Protocollo di streaming | RTSP (standard) |
| Formato di codifica | H.264 |
| Risoluzione | 1080P a 25 fps |
| Campo visivo diagonale (D) | 120° |
| Campo visivo verticale (V) | 54° |
| Campo visivo orizzontale (H) | 95° |
Trasmissione dell'immagine
| Parametro | Descrizione |
|---|---|
| Frequenza operativa | 2,4 GHz |
| Potenza di trasmissione | 18 dBm |
| Portata di comunicazione | 3 km (nessuna interferenza, nessun ostacolo) |
| Gamma di immagini | 1 km (interferenza minima, nessun ostacolo) |
| Larghezza di banda massima | 40 Mbps |
Fotocamera a profondità quadrupla
| Parametro | Descrizione |
|---|---|
| Acceleratore di visione | Scheda madre Intel Movidius Myriad X |
| Risoluzione massima | Dimensioni: 1296x816 |
| Frequenza fotogrammi massima | 1280x800 a 120 fps |
| Tipo di otturatore | Otturatore globale |
| Formato di codifica | Flusso singolo a 8/10 bit |
| Campo visivo | Campo visivo diagonale 150°, campo visivo orizzontale 127,4°, campo visivo verticale 79,7° |
| Numero di sensori | 4 (2 anteriori + 2 posteriori) |
| IMU | BMI270 |
Stazione spaziale
| Parametro | Descrizione |
|---|---|
| Precisione orizzontale | 1,5 m CEP (con SBAS) |
| Precisione della velocità | 0,05 metri al secondo |
| Modalità operativa | GPS + GLONASS + BDS + GALILEO + SBAS + QZSS |
Caricabatterie
| Parametro | Descrizione |
|---|---|
| Modello | Codice articolo: LK150-2640500 |
| Tensione di ingresso CA | 100 V ~ 240 V |
| Tensione di ingresso CC | 26.4V |
| Peso | 460 grammi |
| Corrente di carica | 5A |
Rilevamento LiDAR 3D
| Parametro | Descrizione |
|---|---|
| Modello | METÀ-360 |
| Lunghezza d'onda laser | 905 nm |
| Campo di misura | 40 m @ 10% di riflettività |
| Campo visivo | Orizzontale 360°, Verticale -7° ~ 52° |
| Portata minima | 0,1 metri |
| Frequenza del punto | 10 Hz (tipico) |
| Punto di uscita | 200.000 punti/s |
| Interfaccia dati | Ethernet 100 BASE-TX |
| Sincronizzazione dei dati | IEEE 1588-2008 (PTP v2), GPS |
| IMU integrata | ICM40609 |
| Tensione di alimentazione | 7~27V |
| Dimensioni | 65 mm (larghezza) x 65 mm (profondità) x 60 mm (altezza) |
| Peso | 115 grammi |
| Temperatura di esercizio | Temperatura ambiente -20°C ~ 55°C |
Parametri software
Computer di bordo
| Parametro | Descrizione |
|---|---|
| Modello | Processore Intel Core i5-8365U |
| Sistema | Versione 20.04 di Ubuntu |
| Nome utente | amore |
| Password | amore |
| ROS | noetico |
| ApriCV | 4.7.0 |
| Sistema di posizionamento visivo | BSA_SLAM V1 |
Software Prometeo
| Parametro | Descrizione |
|---|---|
| Versione | versione 2.0 |
| Sistema PrometheusGroundStation | v1.24.11.27 (Versione finale basata sul record di rilascio Wiki) |
Dettagli
Edizione di ricerca SU17
Drone di ricerca di qualità di livello industriale
- LiDAR 3D opzionale: Consente la mappatura, il posizionamento e l'elusione degli ostacoli alla navigazione.
- Software per droni autonomi Prometheus: Ricco di demo per padroneggiare rapidamente il controllo dei droni.
- Piattaforma di volo di livello industriale: Stabile e aperto, stabilisce un nuovo standard per le prestazioni dei droni da ricerca.

Caratteristiche principali
La ricerca SU17 Piattaforma di sviluppo dei droni (indicato come SU17) adotta un design integrato, che incorpora controllori di volo, computer di bordo, moduli SLAM a quattro telecamere, telecamere cloud e moduli di trasmissione delle immagini per un'integrazione di alto livello, migliorando significativamente la stabilità e l'affidabilità dell'hardware. Dotato del software per droni autonomi Prometheus, SU17 supporta funzionalità quali riconoscimento del bersaglio, tracciamento e pianificazione del percorso per vari scenari di controllo del volo.
Integra opzionalmente il MID-360 3D LiDAR, combinato con l'algoritmo FAST-LIO per ottenere 3D LiDAR SLAM, offrendo informazioni precise di rilevamento ambientale e posizionamento. Abbinato all'algoritmo di pianificazione del percorso EGO-Swarm, consente un'efficiente mappatura 3D in tempo reale e l'evitamento degli ostacoli in ambienti complessi.




Sistema software Prometheus V2
La piattaforma di sviluppo è basata sul framework open source ROS e Prometheus, offrendo funzionalità avanzate e API di sviluppo secondarie estese per una riprogrammazione efficiente. Fornisce accesso a informazioni di posizionamento, modalità di volo, stato della batteria, dati IMU e altre interfacce di dati di stato e sensore del drone, insieme a interfacce di controllo per posizione, velocità, accelerazione e assetto.
Inoltre, include esempi di utilizzo per API correlate. Inoltre, il drone è dotato di funzioni di controllo di sicurezza per le operazioni di volo (anti-crash), consentendo la discesa automatica in condizioni anomale, riducendo il rischio di crash e garantendo un processo di sviluppo più sicuro.

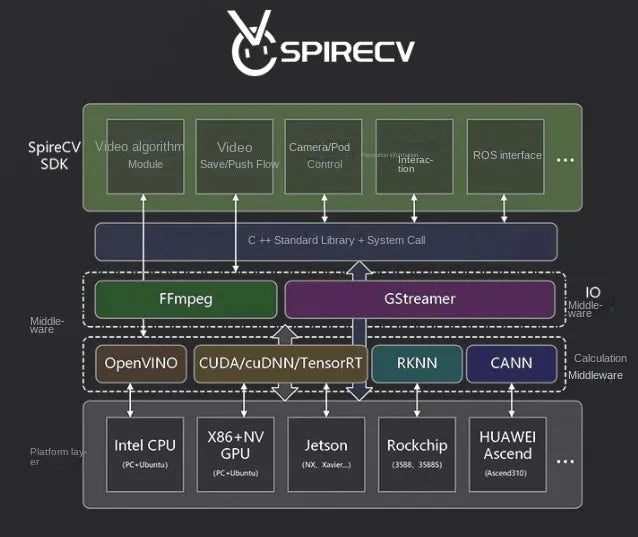
Libreria Vision SpireCV
La SpireCV Vision Library è un SDK di elaborazione delle immagini in tempo reale progettato specificamente per sistemi UAV intelligenti. Fornisce funzionalità quali controllo di gimbal e telecamera, archiviazione e streaming video, rilevamento, riconoscimento e tracciamento del target.
Questo SDK mira a offrire alte prestazioni, affidabilità e un'interfaccia semplificata per gli sviluppatori di sistemi UAV intelligenti. Con una soluzione di elaborazione visiva ricca di funzionalità, consente agli sviluppatori di implementare in modo efficiente varie applicazioni complesse basate sulla visione.
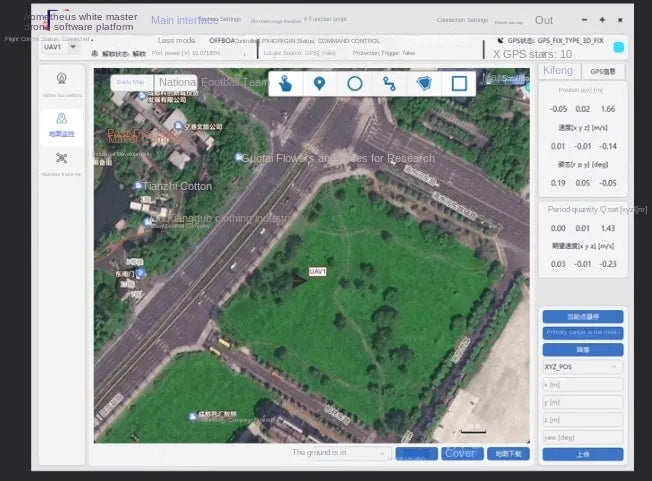
Stazione di terra di Prometheus
La Prometheus Ground Station è un'interfaccia di interazione uomo-drone sviluppata sulla base del sistema Prometheus, realizzata utilizzando la tecnologia Qt. Consente una rapida replica delle funzionalità del sistema Prometheus, fornendo monitoraggio in tempo reale e visualizzazione 3D dello stato del drone e dei dati di controllo.
Tramite la stazione di terra, gli utenti possono eseguire comandi come il decollo con un clic, il volo stazionario nella posizione corrente, l'atterraggio e il controllo della posizione. Inoltre, il sistema supporta pulsanti funzione personalizzati per avviare script definiti dall'utente o inviare messaggi personalizzati, migliorando significativamente la praticità, l'efficienza e la scalabilità delle operazioni dell'utente.
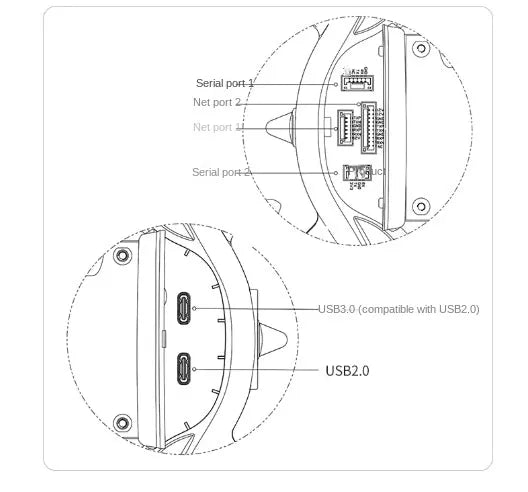
Espansione potente
Porte di espansione hardware
-
Porta seriale 1
-
Porta seriale 2
-
Porta di rete 1
-
Porta di rete 2
-
Porte USB:
- USB 3.0 (compatibile con USB 2.0)
- USB 2.0
Struttura hardware
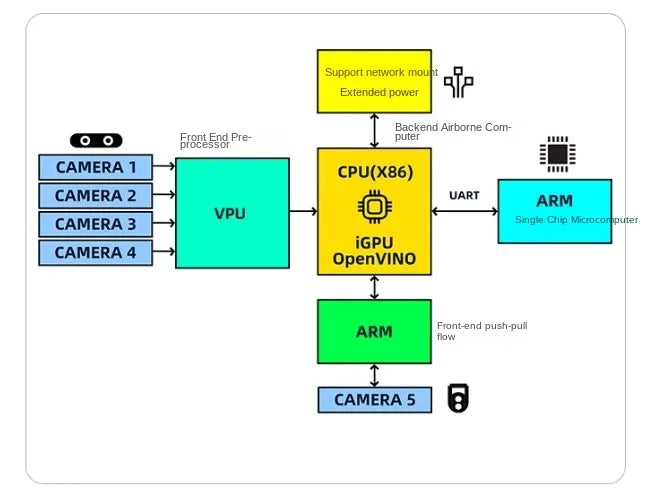
L'immagine illustra l'architettura hardware del drone SU17, evidenziando l'integrazione di vari componenti per l'elaborazione avanzata dei dati e il controllo del sistema:
-
Telecamere (Telecamera 1-4):
Connesso a un VPU (Unità di elaborazione della visione) per la pre-elaborazione front-end. -
VPU:
Gestisce i dati visivi provenienti da più telecamere e li inoltra alle unità di elaborazione. -
Processore (X86) con iGPU e OpenVINO:
Funziona come unità di calcolo primaria per l'elaborazione backend, supportando le capacità di espansione connesse alla rete per una maggiore potenza di calcolo. -
Microcontrollore ARM a chip singolo:
Interagisce con la CPU tramite un'interfaccia UART per funzionalità di controllo aggiuntive. -
Pipelining front-end e telecamera 5:
Gestito da un processore ARM dedicato per un'ulteriore semplificazione dei dati.
Questo framework integra più unità di elaborazione, supportando l'analisi delle immagini in tempo reale, attività computazionali avanzate e comunicazioni fluide tra componenti hardware. Garantisce una gestione efficiente di operazioni complesse in applicazioni di ricerca e sviluppo.
Struttura del software
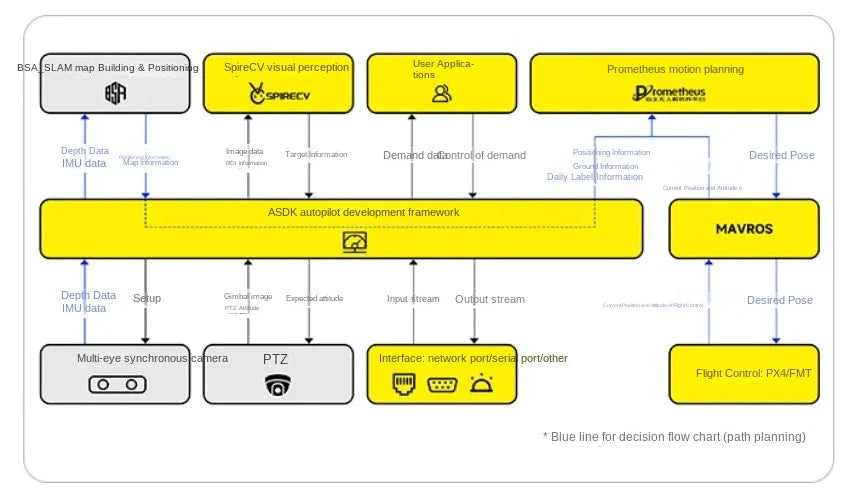
Lo schema illustra l'architettura software del drone SU17, evidenziando l'integrazione di vari sistemi per la funzionalità autonoma:
-
BSA_SLAM (Mappatura e localizzazione):
- Fornisce dati di mappatura e posizionamento spaziale.
- Integra gli ingressi dei sensori di profondità e IMU per una percezione precisa dell'ambiente.
-
SpireCV Vision Perception:
- Elabora dati visivi, tra cui il rilevamento di oggetti, le informazioni ROI e il tracciamento del target.
-
Applicazioni utente:
- Interfacce per attività guidate dall'utente, come la visualizzazione dei dati e l'immissione di comandi.
-
Pianificazione del movimento di Prometheus:
- Gestisce la pianificazione della traiettoria utilizzando dati di posizione, velocità e bersaglio.
-
Quadro di guida autonoma ASDK:
- Funge da livello di elaborazione centrale, gestendo il flusso di dati tra sensori, telecamere, moduli cloud e interfacce esterne.
- Supporta più canali di input/output (ad esempio, porte di rete, porte seriali).
-
MAVROSI:
- Comunica con i sistemi di controllo del volo (PX4/FMT) per il controllo dello stato e della posizione del volo.
-
Modulo Cloud e telecamere Multi-Sync:
- Integra dati basati su cloud per l'elaborazione avanzata.
- Sincronizza gli input visivi per operazioni ad alta precisione.
Linee blu: Rappresentano percorsi decisionali per la pianificazione della traiettoria.
Questa architettura dimostra un design modulare ed estensibile, consentendo una comunicazione fluida tra vari componenti hardware e software per un funzionamento affidabile del drone.
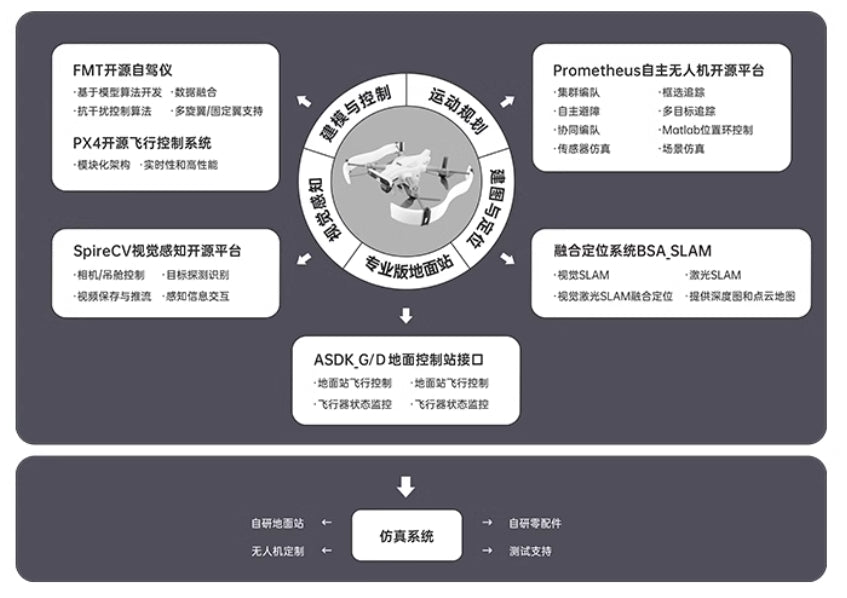
Apertura intelligente: soluzione di sistema UAV integrata
Lo schema presenta un'architettura completa e aperta per i sistemi di droni, sottolineando la modularità e l'integrazione tra i vari componenti:
-
Componenti principali:
- Pilota automatico open source FMT: Fornisce un controllo di volo affidabile basato sullo sviluppo modulare, supportando diversi ambienti e l'integrazione dei dati.
- Sistema di controllo del volo PX4: Garantisce stabilità e supporta la personalizzazione modulare avanzata.
- Piattaforma di percezione della visione SpireCV: Si concentra sull'elaborazione delle immagini, inclusi il rilevamento di oggetti, il tracciamento e lo streaming video in tempo reale.
-
Quadri fondamentali:
- Piattaforma UAV autonoma Prometheus: Include controllo multi-drone, pianificazione del movimento, navigazione collaborativa e simulazioni del mondo reale.
- Sistema BSA_SLAM: Combina SLAM basato sulla visione e SLAM basato su LiDAR per un posizionamento e una mappatura precisi.
- Interfaccia di controllo della stazione di terra ASDK G/D: Consente una comunicazione fluida tra stazioni terrestri e UAV per il monitoraggio e le regolazioni in tempo reale.
-
Integrazione del flusso di lavoro:
- Evidenzia processi quali la pianificazione del movimento, la mappatura dell'ambiente e la navigazione autonoma.
- Integrazione con stazioni di terra professionali per il controllo della traiettoria, l'elusione degli ostacoli e la gestione dei dati in tempo reale.
-
Supporto alla simulazione:
- Include un sistema di simulazione per test di missioni autonome, controllo di UAV e convalida dei componenti.
Questo sistema rappresenta una soluzione all'avanguardia per lo sviluppo di UAV autonomi, con capacità scalabili per la ricerca, l'applicazione e i test in diversi scenari.
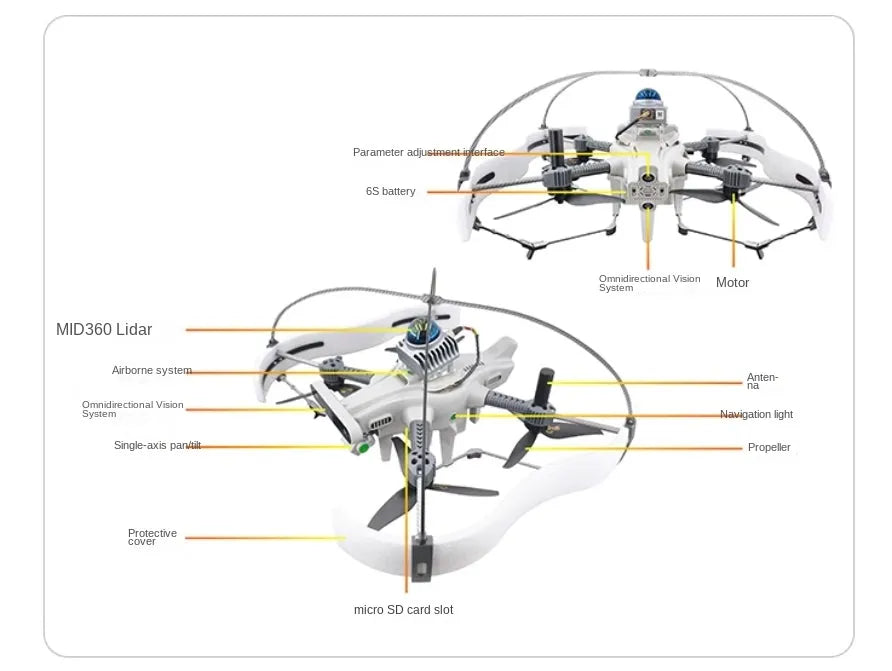
i componenti strutturali del drone di ricerca SU17, sottolineandone la stabilità e il design avanzato. Le caratteristiche principali includono il Sensore LiDAR MID360 per una mappatura precisa, un sistema di visione omnidirezionale per una percezione ambientale completa, una giunto cardanico monoasse per immagini stabilizzate e un robusto Batteria 6S per una potenza estesa. Altri componenti essenziali includono il sistema di elica, antenna, luci di navigazione, e un slot per scheda micro SD per l'archiviazione dei dati. Il design integra hardware all'avanguardia, garantendo affidabilità e prestazioni elevate per varie applicazioni di ricerca.
Related Collections