



Ti5 Robot CRA-RI40-52-PRO-XX Attuatore giunto robot integrato, azionamento armonico, 7 N·m, 24–48 V, CAN/EtherCAT, IP65, albero cavo, encoder singolo/doppio (opzione freno)
Ti5 Robot CRA-RI40-52-PRO-XX Attuatore giunto robot integrato, azionamento armonico, 7 N·m, 24–48 V, CAN/EtherCAT, IP65, albero cavo, encoder singolo/doppio (opzione freno)
Ti5 Robot
Impossibile caricare la disponibilità di ritiro
Panoramica
Il Ti5 Robot CRA-RI40-52-PRO-XX è un modulo di giunzione compatto e integrato che combina un motore di coppia frameless, un riduttore armonico di precisione, un servoazionamento e un encoder magnetico in un'unica unità IP65. Con un'alimentazione da 24 a 48 V CC e una potenza nominale di 90 W, fornisce una coppia nominale di 7 N·m e una velocità di uscita nominale di 80 giri/min per robot umanoidi, esoscheletri, bracci collaborativi, gimbal, AGV e altre applicazioni di fascia alta. Un foro passante centrale supporta il passaggio dei cavi; sono disponibili configurazioni a singolo o doppio encoder e un'opzione con freno di stazionamento. La comunicazione è CAN di default, con EtherCAT selezionabile.
Caratteristiche principali
-
Motore integrato + azionamento + riduttore armonico + encoder (magnetico)
-
Coppia nominale 7 N·m; velocità nominale di uscita 80 giri/min; potenza 90 W
-
Due rapporti di riduzione: 51:1 o 101:1
-
Alta precisione: encoder a 17 bit, gioco tipico 40 arcsec (51)/30 arcsec (101)
-
Bassa rumorosità, basso cogging; design ad alta densità di coppia
-
Protezione IP65; bassa temperatura opzionale & personalizzazione impermeabile
-
Bus di comunicazione: CAN (standard) o EtherCAT (opzionale)
-
Opzioni encoder singolo/doppio; versioni con freno o senza freno
-
Foro passante per cablaggio: 12 mm (standard)/11 mm (freno)
-
Applicazioni tipiche: umanoidi, giunti cobot, esoscheletri, pan-tilt, apparecchiature industriali, robot di ispezione di potenza, sistemi marini/veicolari
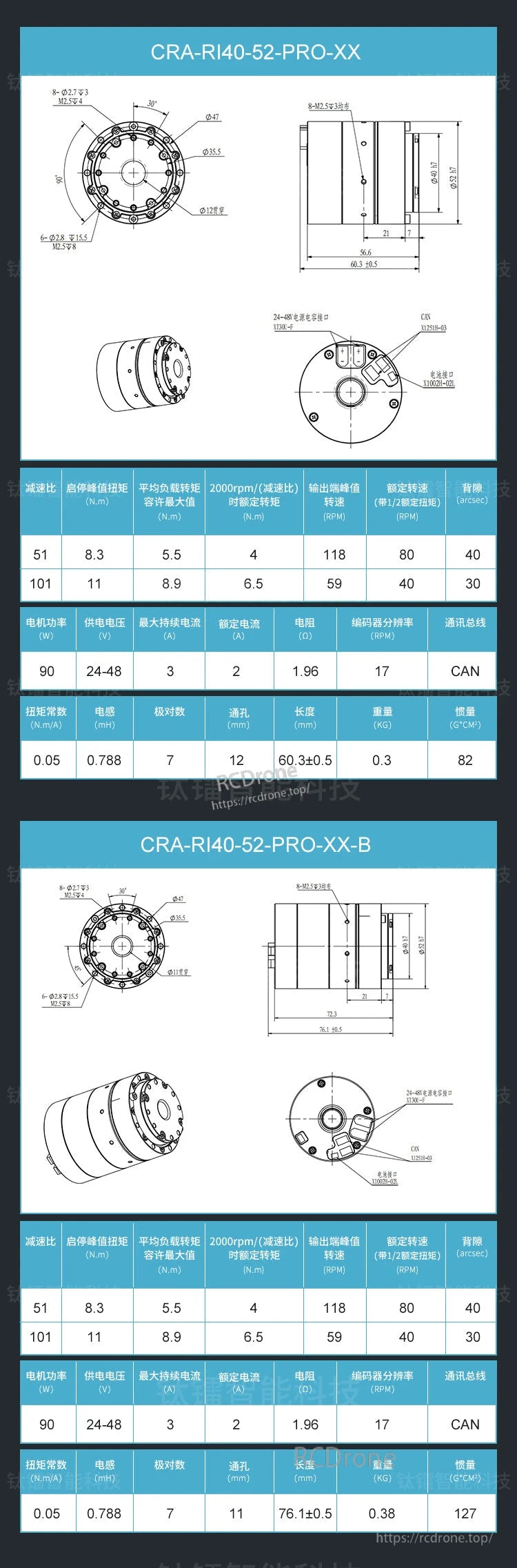
Prestazioni per rapporto di trasmissione
| Articolo | 51:1 | 101:1 |
|---|---|---|
| Coppia massima di avvio/arresto (N·m) | 8.3 | 11 |
| Coppia di carico media massima consentita (N·m) | 5.5 | 8.9 |
| Coppia nominale a 2000 giri/min/(rapporto) (N·m) | 4 | 6.5 |
| Velocità di uscita massima (giri/min) | 118 | 59 |
| Velocità nominale a ½ coppia nominale (giri/min) | 80 | 80 |
| Gioco (arcosecondo) | 40 | 30 |
Specifiche elettriche
-
Tensione di alimentazione: 24–48 V CC
-
Corrente nominale/continua: 2 A (max 3 A continui)
-
Resistenza di fase: 1,96 Ω
-
Induttanza: 0,788 mH
-
Costante di coppia: 0,05 Nm/A
-
Coppie di poli: 7
-
Risoluzione dell'encoder: 17 bit (magnetico)
Meccanico & Interfaccia
-
Grado di protezione: IP65
-
Velocità di uscita nominale: 80 giri al minuto
-
Comunicazione: POTERE (predefinito)/EtherCAT (opzione)
-
Foro passante (per il cablaggio): Ø12 mm (standard)/Ø11 mm (con freno)
-
Lunghezza & inerzia (senza freno): 60,3 ± 0,5 millimetri, 82 g·cm²
-
Lunghezza & inerzia (versione freno -B): 76,1 ± 0,5 millimetri, 127 g·cm²
-
Massa: 0.3 kg
-
Lunghezza del cavo: 5 metri
-
Ambiente operativo (tipico): fino a 60 °C
-
Materiali: componenti in alluminio con riduttore armonico di precisione
Varianti & Opzioni
-
Comunicazione: CAN o EtherCAT
-
Codificatore: encoder magnetico singolo o doppio
-
Freno: non frenante (standard) o -B versione con freno di stazionamento
-
Ambiente: pacchetto impermeabilizzante e a bassa temperatura personalizzabile
-
Notazione della serie: CRA-PIXX-XX-(PRO)-XX-(B, T, 2E, IPXX) (indica il riduttore, il conteggio del sensore/encoder di coppia, il rapporto, la protezione, ecc.)
Applicazioni tipiche
Giunti umanoidi (spalla/gomito/anca/ginocchio), bracci robotici collaborativi, attuatori esoscheletrici, giunti cardanici per visione panoramica e inclinabile, assi di automazione industriale, UGV/AGV per l'ispezione di potenza e meccanismi ausiliari per veicoli/marini.
Note
-
Installare utilizzando gli schemi delle viti e le tolleranze specificati nei disegni.
-
Prima di ordinare, confermare il rapporto, la configurazione dell'encoder, il bus di comunicazione e i requisiti del freno.
-
Data la natura industriale di questo prodotto, le unità installate/utilizzate in genere non sono restituibili; consultare la documentazione sulle dimensioni con il personale tecnico prima dell'acquisto.
Dettagli
Gli attuatori articolari per robot Ti5 CRA-R140-52-PRO-XX e -B offrono 90 W di potenza, alimentazione 24–48 V, corrente massima 3 A, risoluzione dell'encoder 17 RPM, coppia, velocità e comunicazione CAN.

L'attuatore per giunto robotico Ti5 modello CRA-PIXX-XX-(PRO)-XX-(B, T, 2E, IPXX) include freno, sensore di coppia, doppi encoder, grado di impermeabilità, rapporto di riduzione, diametro esterno e tipo di motore.

Attuatori articolari serie PRO per robot umanoidi, esoscheletri, robot collaborativi, automobili, AGV. Caratteristiche: elevata robustezza, lunga durata, elevata densità di coppia, bassa coppia di cogging, impermeabili, antipolvere, antideflagranti, bassa rumorosità, alta precisione, design ad albero cavo.
Related Collections



