Modulo di giunzione robot integrato Ti5 Robot CRA-RI60-80-PRO-XX: azionamento armonico, 24–48 V, CAN/EtherCAT, encoder a 17 bit
Modulo di giunzione robot integrato Ti5 Robot CRA-RI60-80-PRO-XX: azionamento armonico, 24–48 V, CAN/EtherCAT, encoder a 17 bit
Ti5 Robot
Impossibile caricare la disponibilità di ritiro
Panoramica
Il robot Ti5 CRA-RI60-80-PRO-XX è un giunto integrato compatto ad albero cavo per umanoidi, cobot e manipolatori mobili. Combina un riduttore armonico ultrasottile, motore di coppia senza telaio, Servoazionamento FOC, E encoder magnetico assoluto in un modulo, fornendo uscita con gioco quasi nullo, bassa rumorosità e alta densità di coppia. Il giunto supporta POTERE O EtherCAT, encoder singoli o doppi, e un freno di stazionamento opzionaleSono disponibili due lunghezze: la standard PRO-XX e quella estesa PRO-XX-B (corpo più lungo, maggiore inerzia del rotore, foro passante più grande).
Caratteristiche principali
-
Giunto tutto in uno: riduttore armonico + motore di coppia + driver FOC + encoder assoluto.
-
Contraccolpo quasi nullo in uscita; controllo fluido a bassa velocità e basso rumore acustico.
-
Progettazione dell'albero cavo per il passaggio di cavi/vie aeree; rapporti di riduzione multipli.
-
Encoder assoluto, 17 bit, memoria di posizione in caso di perdita di potenza; opzionale doppio codificatore versione.
-
Comunicazione: POTERE O EtherCAT selezionabile.
-
Energia: 24–48 V, driver integrato, classe di potenza del motore 300 W.
-
Freno di stazionamento opzionale; IP/impermeabile & bassa temperatura personalizzazione disponibile.
-
Pronto per l'applicazione per gimbal, umanoidi, cobot, apparecchiature industriali, robot di pattugliamento e dispositivi marini.
Specifiche
Elettrico & Controllo (condiviso da PRO-XX/PRO-XX-B)
-
Potenza nominale del motore: 300 W
-
Tensione di alimentazione: 24–48 V CC
-
Corrente continua massima: 6,7 A; corrente nominale: 5 A
-
Resistenza di fase: 0,33 Ω
-
Costante di coppia: 0,096 Nm/A
-
Induttanza: 0,074 mH
-
Coppie di poli: 10
-
Codificatore: assoluto a 17 bit; opzioni di codifica singola/doppia
-
Autobus: POTERE (standard) o EtherCAT (opzione)
Meccanico (albero cavo)
-
Foro passante (PRO-XX): Ø15 mm
-
Foro passante (PRO-XX-B): Ø18 mm
-
Lunghezza (PRO-XX): 70,4 ± 0,5 millimetri; peso ≈1,01 kg; inerzia del rotore ≈441 g·cm²
-
Lunghezza (PRO-XX-B): 92,9 ± 0,5 millimetri; peso ≈1,17 kg; inerzia del rotore ≈595 g·cm²
-
Montaggio: cerchio di bulloni frontale (uscita cava); riduttore armonico integrato
-
Opzioni: freno di stazionamento; encoder singolo/doppio; CAN/EtherCAT; impermeabilizzazione & pacchetto a bassa temperatura
Opzioni di riduzione &lificatore; prestazioni (lato uscita)
Gioco: basso quanto 10–20 secondi d'arco a seconda del rapporto.
| Rapporto di riduzione | Coppia massima di avvio/arresto (N·m) | Coppia di carico media massima (N·m) | Coppia nominale a 2000 giri/min/rapporto (N·m) | Velocità massima (giri/min) | Velocità nominale a ½ coppia nominale (giri/min) | Gioco (arcosecondo) |
|---|---|---|---|---|---|---|
| 51:1 | 42 | 32 | 19.8 | 82 | 68 | 20 |
| 81:1 | 53 | 33 | 27.5 | 51 | 43 | 20 |
| 101:1 | 66 | 49 | 30 | 41 | 34 | 10 |
| 121:1 | 66 | 49 | 30 | 32 | 24 | 10 |
Note:
• I dati sopra riportati sono tratti dalle schede prodotto per CRA-RI60-80-PRO-XX e PRO-XX-B.
• PRO-XX-B condivide la stessa tabella coppia/velocità; offre un foro passante più grande e una maggiore inerzia con il corpo più lungo.
Applicazioni
-
Umanoide &e robot di servizio: articolazioni di spalla, gomito, anca, ginocchio, caviglia con elevata densità di coppia.
-
Bracci robotici collaborativi: assi precisi a gioco ridotto per un controllo fluido della forza.
-
Giunti cardanici & unità pan-tilt: tracciamento silenzioso e stabile a bassa velocità con memoria di posizione assoluta.
-
Attrezzature industriali &e manipolatori AGV/AMR: azionamento integrato compatto per spazi ristretti.
-
Robot di pattugliamento e ispezione di potenza; dispositivi marini/di bordo (con opzione impermeabile).
Dettagli
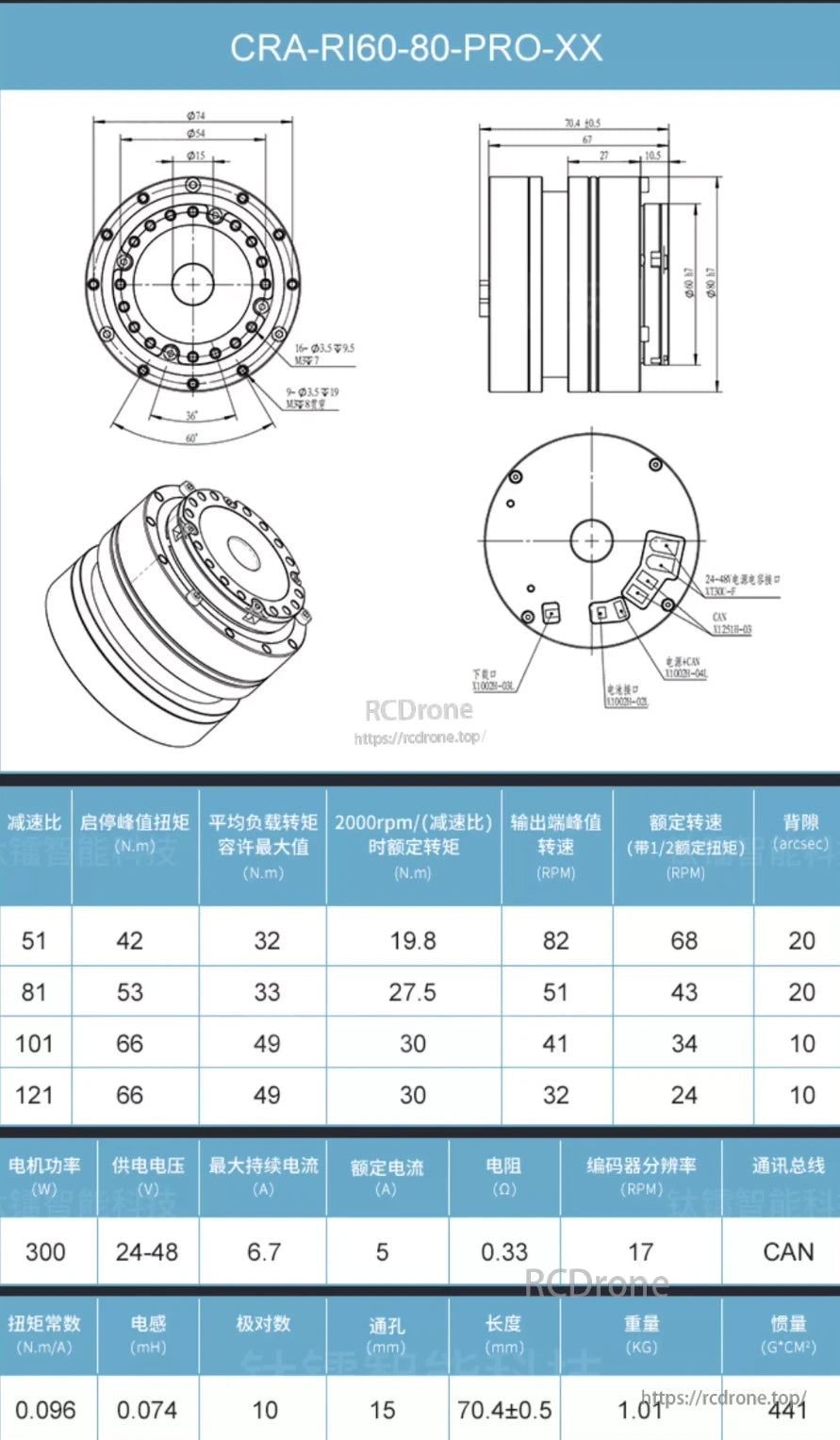
Specifiche del modulo giunto robot CRA-RI60-80-PRO-XX: motore da 300 W, ingresso 24-48 V, bus CAN, encoder 17 CPR, lunghezza 70,4 mm, peso 1,01 kg, rapporti di trasmissione multipli con dati di coppia e velocità forniti.
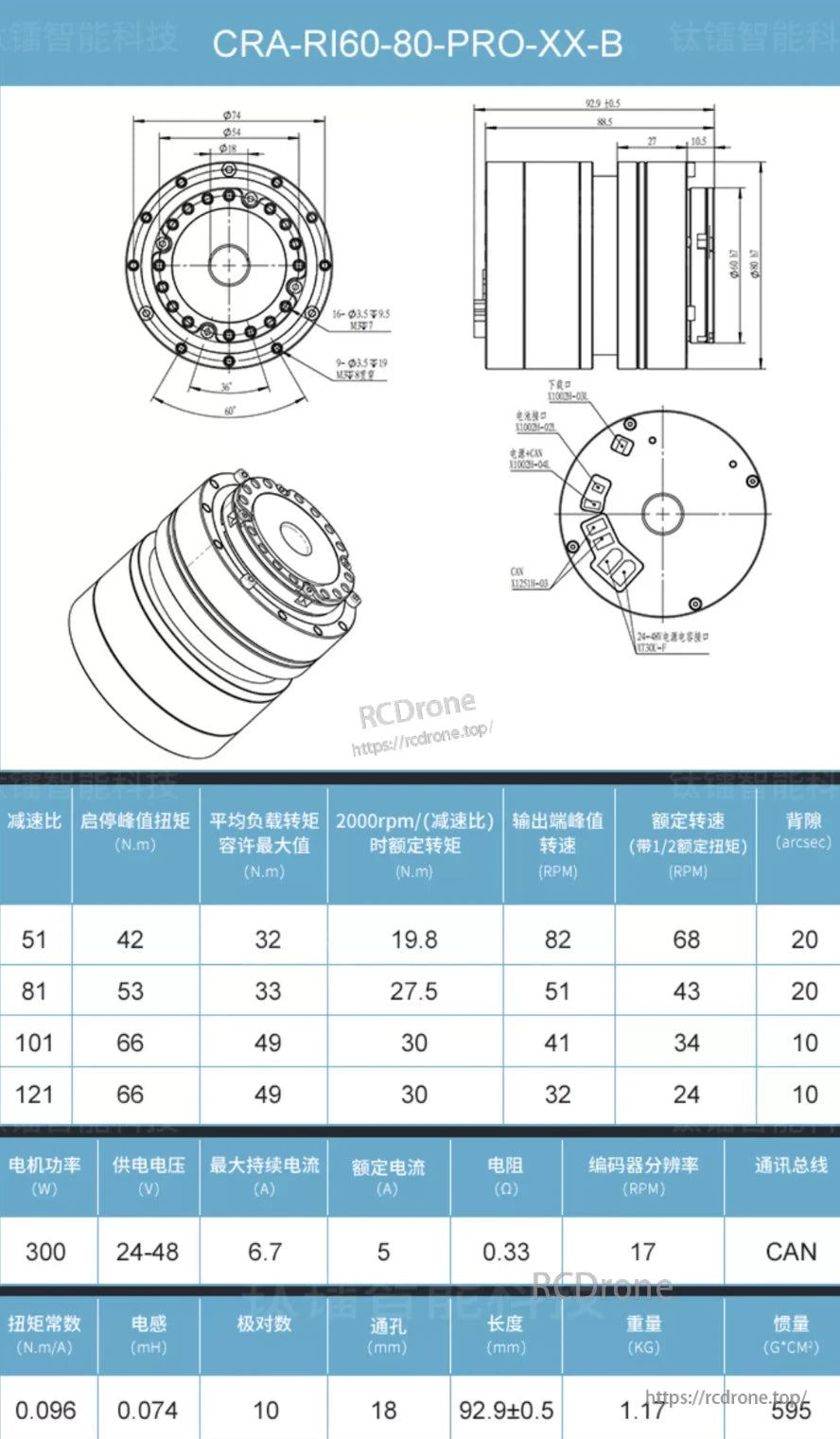
Modulo giunto robotico CRA-RI60-80-PRO-XX-B con motore da 300 W, alimentazione 24-48 V, comunicazione CAN, risoluzione encoder 17 RPM e diversi rapporti di trasmissione. Le specifiche principali includono coppia, velocità, corrente e dimensioni.
Related Collections