








WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – Accelerometro, giroscopio e inclinometro a 6 assi, compatibile con ROS/Matlab
WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – Accelerometro, giroscopio e inclinometro a 6 assi, compatibile con ROS/Matlab
WitMotion
Impossibile caricare la disponibilità di ritiro
Overview
Il WitMotion HWT601-AGV-485 è un sensore di atteggiamento/heading a 6 assi progettato per robot AGV, droni e piattaforme autonome. Combina accelerazione a 3 assi + velocità angolare a 3 assi e fornisce angolo a 3 assi &e quaternione tramite RS485 (Modbus) fino a 200 Hz. Il modulo presenta filtraggio dinamico di Kalman, calibrazione del piatto girevole ad alta precisione, acquisizione automatica/manuale del bias, alimentazione di backup per il salvataggio dell'heading in caso di spegnimento, e un involucro impermeabile/dustproof IP67. Supporta anche cascading multi-livello (fino a 32 unità) per la misurazione sincronizzata dell'atteggiamento.
Caratteristiche principali
-
Angolo ad alta precisione: precisione XY 0.1°; precisione Z 0.1° (HWT601-AGV-485) / 0.15° (WT601-AGV-485).
-
Bias del giroscopio stabile: XY 5°/h; Z 2°/h (HWT601-AGV-485) / 5°/h (WT601-AGV-485).
-
Ampio ingresso 9–36 V, corrente operativa ≈ 8 mA @12 V.
-
RS485 Modbus, baud 4.800–230.400 bps.
-
Campionamento: lettura richiesta–risposta fino a 200 Hz.
-
Algoritmo: fusione del filtro di Kalman e algoritmo di intestazione AGV dedicato.
-
Software: suite PC gratuita con dashboard in tempo reale, grafici delle curve, visualizzazione 3D (auto/sfera/cubo/plane), configurazione (bias, riferimento angolare, calibrazione dell'accelerazione, fattori di scala), registrazione dati & salvataggio diretto, e importazione Matlab.
-
Amichevole per gli sviluppatori: programmi di esempio e supporto per il codice per ROS, Linux, C/C#, Python.
-
Ambientale: IP67, -40~80 °C (variante da tavolo -40~85 °C mostrata).
-
Cascading: fino a 32 sensori su RS485 per misurazione simultanea dell'atteggiamento.
Linee guida per l'installazione
-
Montare il sensore su una superficie piana, stabile e rigida; basi irregolari causano errori angolari (vedi FIG.1–2).
-
Mantenere l'asse del sensore parallelo all'asse misurato; evitare angoli tra gli assi (vedi FIG.3–4).
-
Questo modello supporta solo l'installazione orizzontale.
Software &e Visualizzazione
-
Pannello di Controllo Dati Potente (angoli, tasso, accelerazione, magnetismo, quaternione, porte, temperatura, tensione, ecc.).
-
Pannello di Configurazione: velocità di trasmissione, indirizzo dispositivo, acquisizione automatica del bias, reset asse Z, calibrazione dell'accelerazione, riferimento angolare, calibrazione manuale positiva/negativa e fattori di scala.
-
Modelli 3D per monitoraggio del movimento intuitivo e curve in tempo reale con aggiornamenti dinamici.
-
Visualizzazione dei dati grezzi e salvataggio file per una facile raccolta; importazione analisi Matlab supportata.
-
Demo ROS IMU INS: visualizzazione del tracciamento dell'atteggiamento e visualizzazione dei dati di atteggiamento (yaw/roll/pitch, velocità angolare, accelerazione lineare).
html
Specifiche
Interfaccia &e Prestazioni
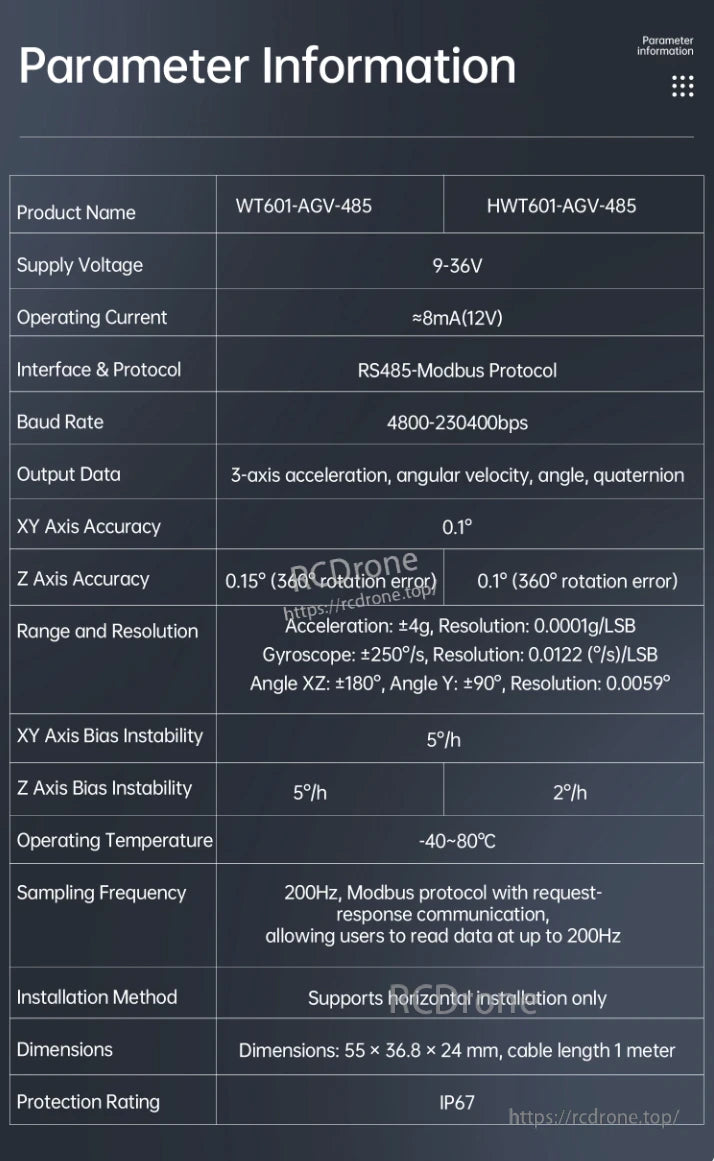
| Articolo | HWT601-AGV-485 | WT601-AGV-485 |
|---|---|---|
| Interfaccia / Protocollo | RS485 / Modbus | RS485 / Modbus |
| Velocità di trasmissione | 4.800–230.400 bps | 4.800–230.400 bps |
| Dati di uscita | Accelerazione a 3 assi, velocità angolare, angolo, quaternione | Stesso|
| Frequenza di campionamento | Fino a 200 Hz (richiesta–risposta) | Fino a 200 Hz |
| Precisione angolare XY | 0.1° | 0. 1° |
| Precisione dell'angolo Z (errore di rotazione a 360°) | 0.1° | 0.15° |
| Intervallo di accelerazione / risoluzione | ±4 g / 0.0001 g/LSB | Stesso |
| Intervallo di giroscopio / risoluzione | ±250 °/s / 0.0122 (°/s)/LSB | Stesso |
| Intervallo di angolo / risoluzione | XZ: ±180°; Y: ±90° / 0.0059° | Stesso |
| Instabilità del bias del giroscopio (XY / Z) | 5°/h / 2°/h | 5°/h / 5°/h |
| Coefficiente di temperatura (XYZ) | 0.002°/°C | 0.002°/°C |
Elettrico, Meccanico &e Ambiente
-
Tensione di alimentazione: 9–36 V; Corrente operativa: ≈ 8 mA (12 V)
-
Dimensioni: 55 × 36.8 × 24 mm; Lunghezza del cavo: 1 m
-
Protezione: IP67
-
Temperatura di funzionamento: -40~80 °C (la variante della tabella mostra anche -40~85 °C)
-
Installazione: Solo montaggio orizzontale
-
Cascading: Fino a 32 unità su RS485
Aree di applicazione
AGV/AMR e robot mobili, droni/UAV, veicoli logistici senza equipaggio e moduli di percezione per guida autonoma.
Nomenclatura del modello & Selezione
-
HWT601-AGV-485 – maggiore precisione sull'asse Z (0.1°) e minore instabilità del bias Z (2°/h).
-
WT601-AGV-485 – specifiche standard dell'asse Z (0,15°, 5°/h).
Scegli HWT601 quando la precisione dell'orientamento Z è critica.
Dettagli

Sensore di atteggiamento ad alta precisione a 6 assi con accelerazione a 3 assi, velocità angolare, angolo e quaternione. Caratteristiche dell'algoritmo di orientamento AGV, protezione IP67, filtraggio di Kalman, acquisizione automatica del bias e supporto software per PC.
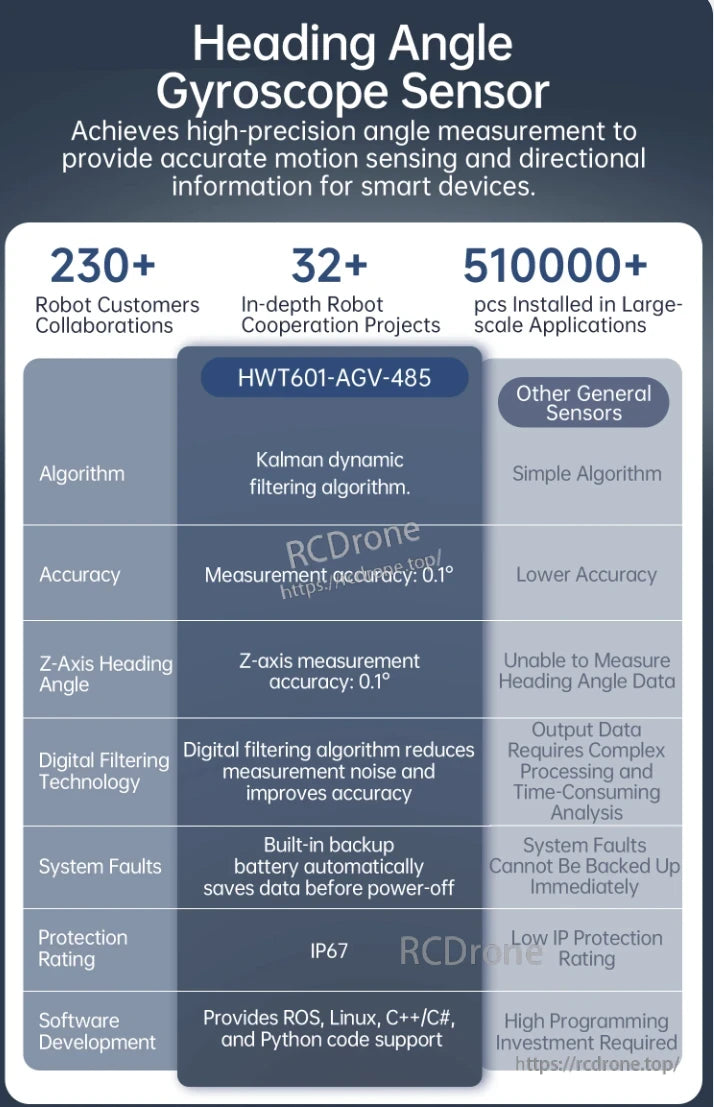
Il sensore giroscopico dell'angolo di orientamento HWT601-AGV-485 offre misurazioni angolari ad alta precisione con filtraggio di Kalman, precisione di 0,1°, riduzione del rumore digitale, protezione IP67 e supporta ROS, Linux, C++ e Python. Oltre 230 collaborazioni robotiche e oltre 510.000 installazioni.
L'IMU HWT601-AGV-485 offre un'alimentazione di 9-36V, RS485-Modbus, campionamento a 200Hz, accelerazione di ±4g, giroscopio di ±250°/s, grado di protezione IP67, funzionamento da -40 a 80°C. Fornisce dati 3-assiali accurati e ad alta risoluzione.
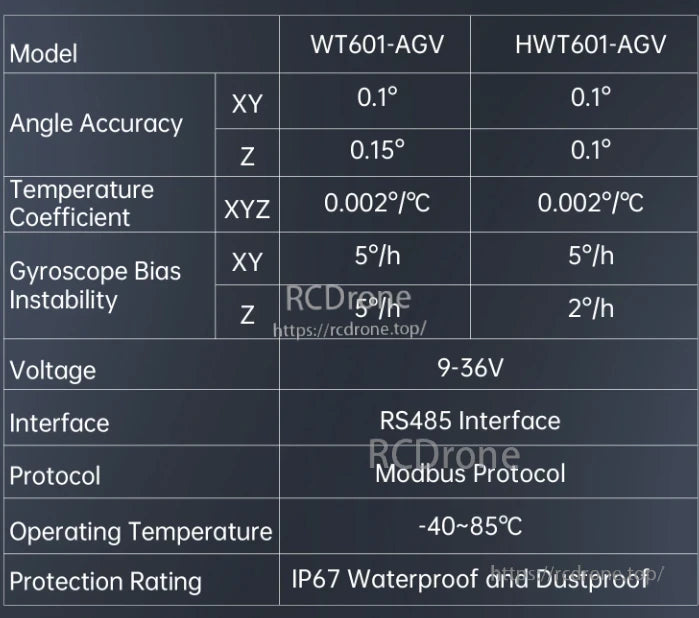
L'IMU HWT601-AGV offre un'accuratezza angolare di 0,1° sugli assi XY e Z con un coefficiente di temperatura di 0,002°/°C su XYZ. L'instabilità del bias del giroscopio è di 5°/h (XY) e 2°/h (Z). Funziona con 9–36V, utilizza RS485 con Modbus e opera da -40 a 85°C. Con grado di protezione IP67, offre protezione contro acqua e polvere. La variante WT601-AGV ha specifiche simili ma un'accuratezza di 0,15° sull'asse Z e un'instabilità del bias di 5°/h sull'asse Z. Entrambi i modelli garantiscono prestazioni affidabili in ambienti impegnativi.
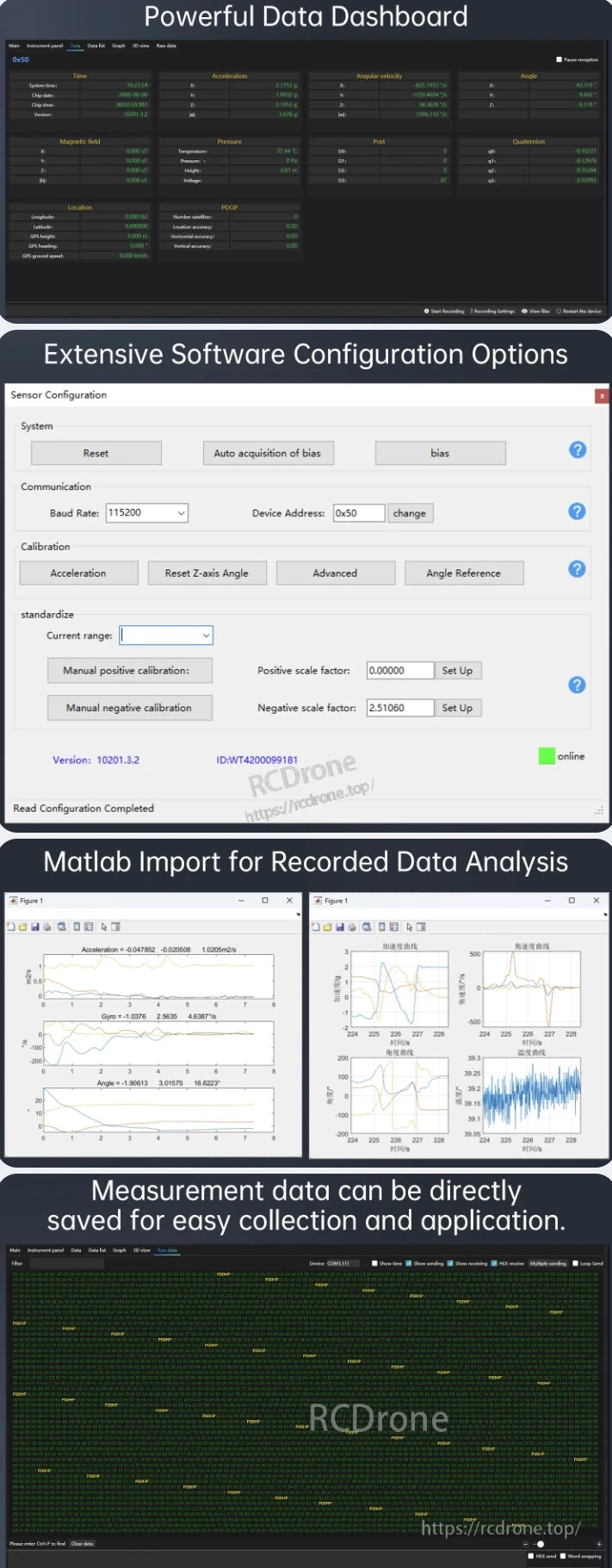
Pannello dati potente con letture dei sensori in tempo reale, configurazione software estesa, importazione MATLAB per analisi e salvataggio diretto dei dati per una facile raccolta e applicazione.
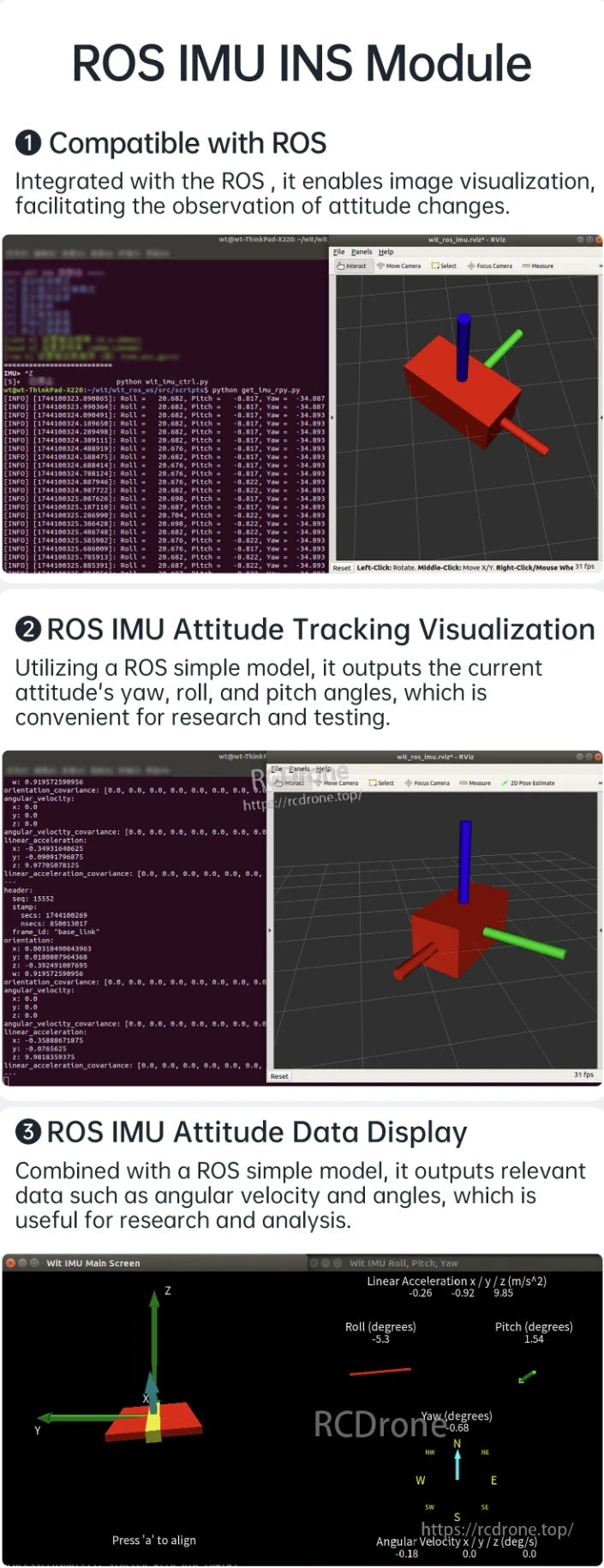
Il modulo ROS IMU INS offre compatibilità con ROS, visualizza il tracciamento dell'atteggiamento e mostra in tempo reale rollio, beccheggio, imbardata, velocità angolare e accelerazione lineare per ricerca e analisi.
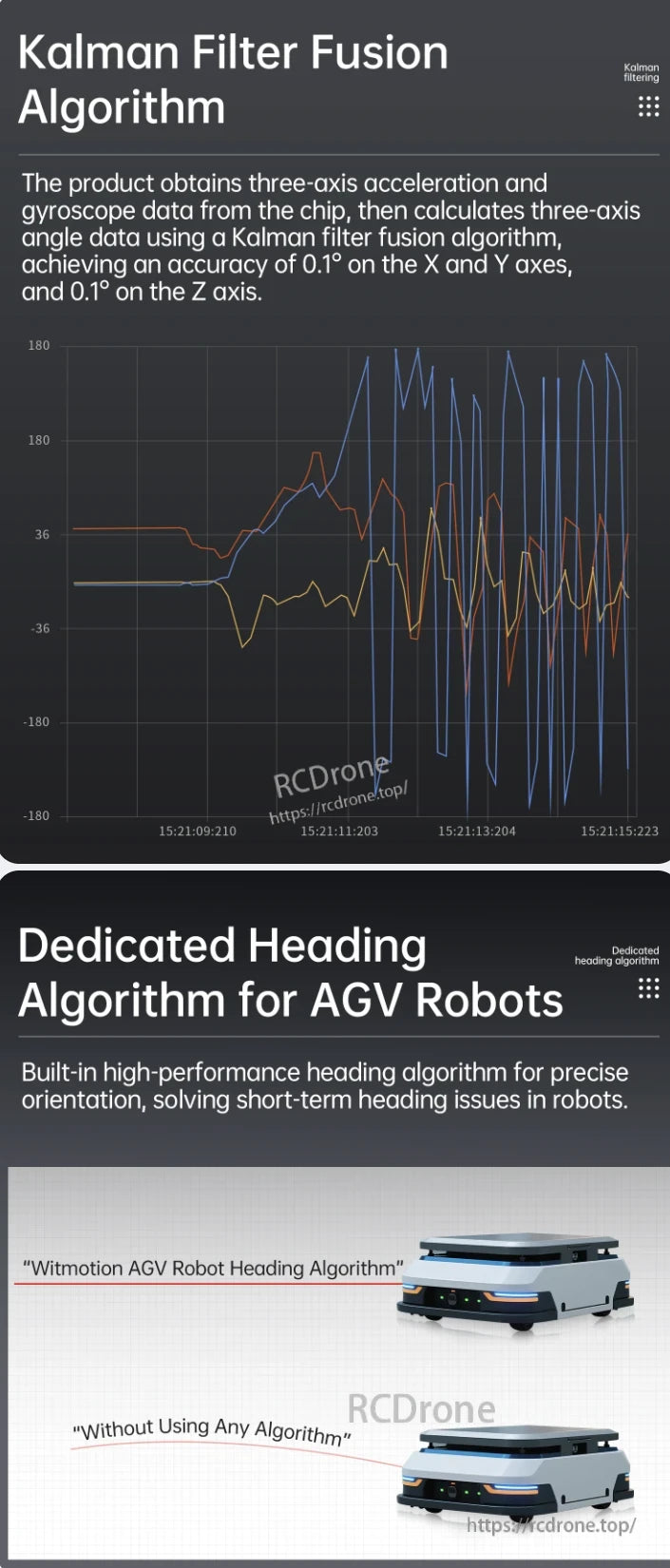
Il WitMotion HWT601 AGV IMU fornisce dati angolari precisi su 3 assi con un'accuratezza di 0,1° utilizzando la fusione del filtro di Kalman. Il suo algoritmo di orientamento dedicato garantisce un'orientamento stabile del robot, migliorando significativamente le prestazioni rispetto ai sistemi privi di tali algoritmi.
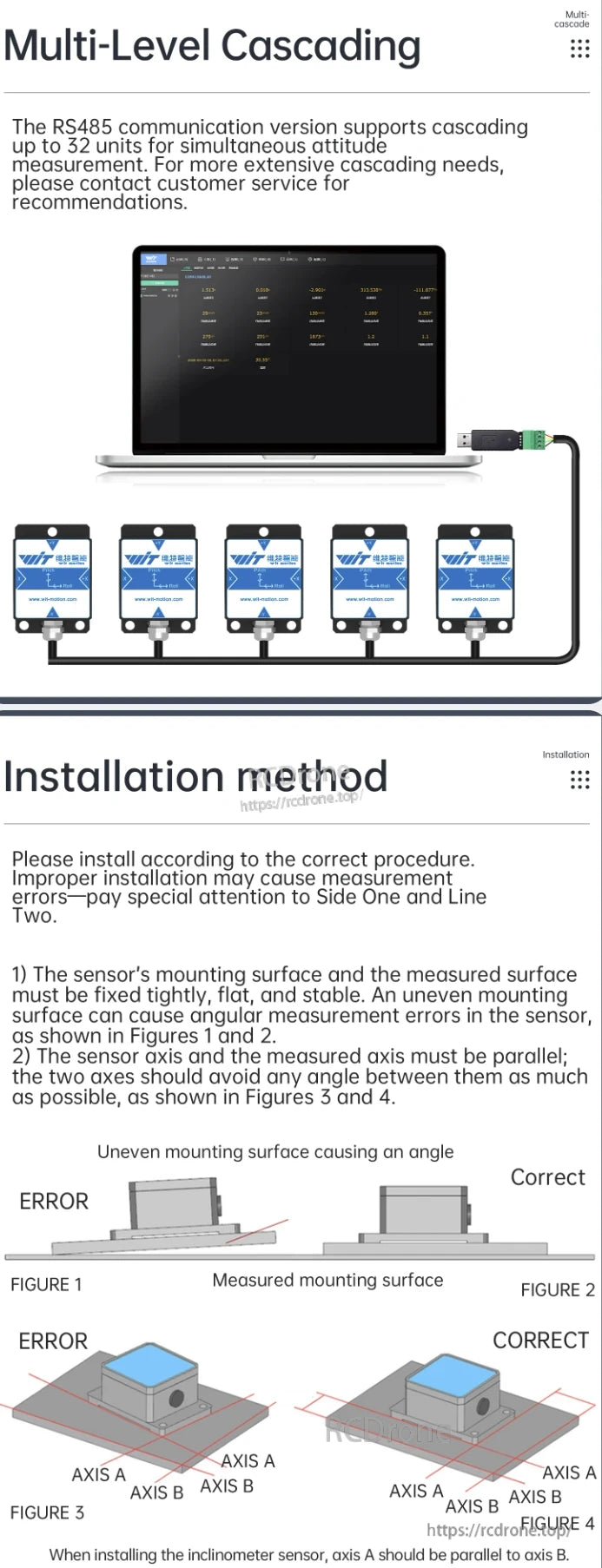
Il WitMotion HWT601 AGV IMU supporta fino a 32 unità in cascata tramite RS485 per la misurazione dell'atteggiamento. Assicurati di un montaggio piatto e stabile e di assi allineati per garantire l'accuratezza.
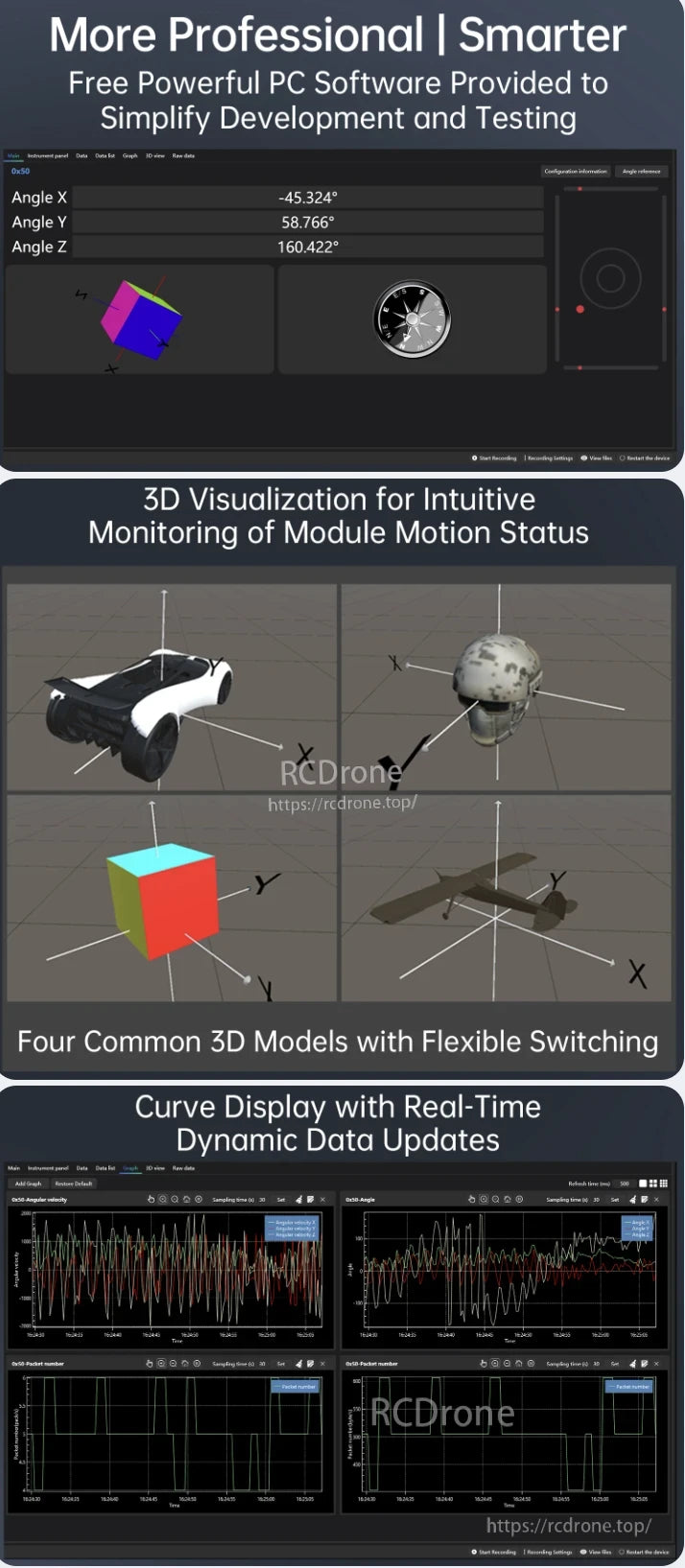
Il software professionale per PC per il WitMotion HWT601 AGV IMU offre visualizzazione 3D in tempo reale, monitoraggio degli angoli e visualizzazione delle curve dinamiche.Le caratteristiche includono il tracciamento del movimento intuitivo, il passaggio flessibile tra i modelli e gli aggiornamenti dei dati in tempo reale per uno sviluppo e un testing efficienti.
La documentazione di supporto include programmi di esempio per STM32, Arduino, 51 UART, Windows C++ e Matlab per aiutare gli sviluppatori ad applicare il prodotto utilizzando tutorial e campioni di codice.
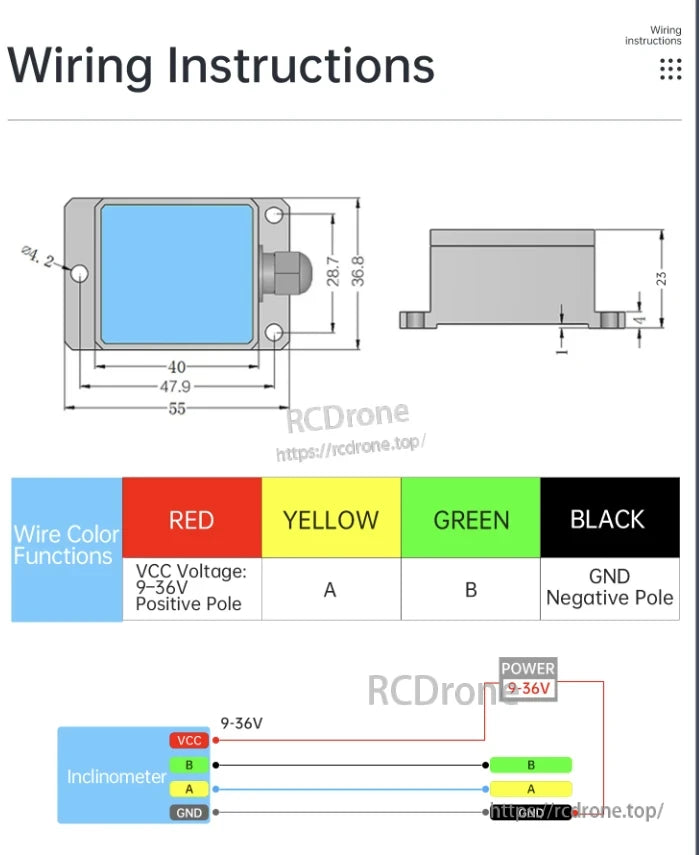
Guida al cablaggio dell'IMU WitMotion HWT601 AGV: rosso (9-36V), giallo (A), verde (B), nero (GND). Dimensioni e diagramma di connessione forniti.

WitMotion HWT601 AGV IMU per droni, guida autonoma, robot mobili e veicoli logistici senza pilota.
Related Collections








