WitMotion WT61 IMU (MPU6050) – Accelerometro e giroscopio a 6 assi con uscita angolare, Kalman AHRS, TTL seriale, 20/100 Hz, 3.3–5 V per Arduino/Raspberry Pi/PC
WitMotion WT61 IMU (MPU6050) – Accelerometro e giroscopio a 6 assi con uscita angolare, Kalman AHRS, TTL seriale, 20/100 Hz, 3.3–5 V per Arduino/Raspberry Pi/PC
WitMotion
Impossibile caricare la disponibilità di ritiro
Overview
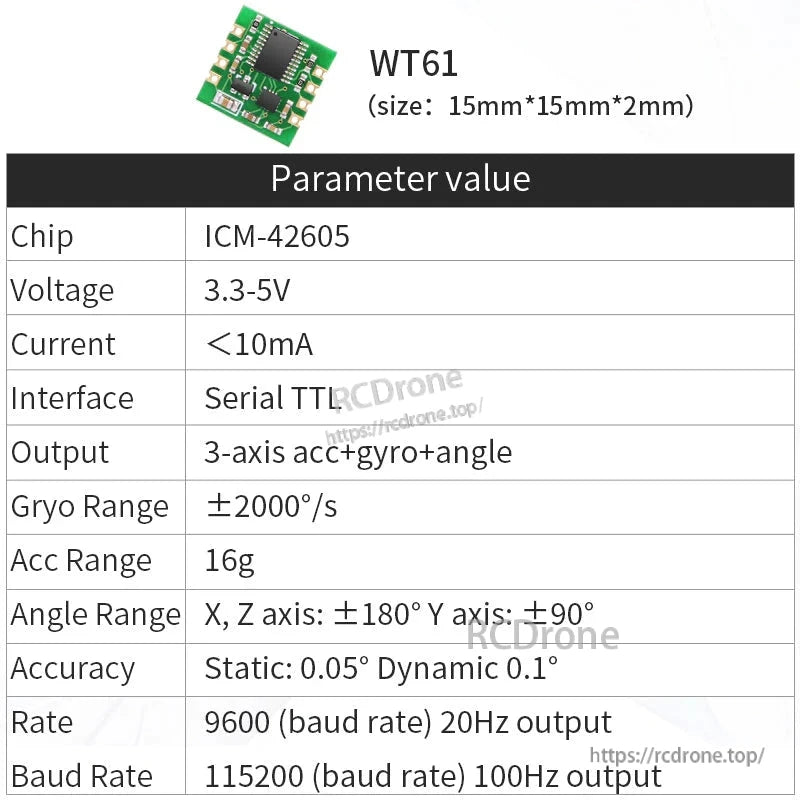
Il WitMotion WT61 è un sensore di atteggiamento MEMS a 6 assi che fornisce 3 assi di accelerazione, 3 assi di velocità angolare e angolo fuso (roll/pitch/yaw). Utilizza un MCU a 48 MHz con un IMU integrato (MPU6050, secondo la denominazione del modello) e la fusione dinamica di WitMotion + filtraggio di Kalman per offrire alta stabilità, basso rumore e risultati angolari precisi. Il modulo comunica tramite Serial TTL ed è molto compatto (15.24 × 15.24 × 2 mm, ~1 g), rendendolo facile da integrare in dispositivi IoT, robot, macchinari mobili, monitoraggio strutturale, elettronica di consumo e gadget VR.
Caratteristiche principali
-
3 uscite: accelerazione, velocità angolare e angolo (atteggiamento).
-
Algoritmo di fusione: fusione dinamica + filtraggio di Kalman; eredità dell'algoritmo di atteggiamento di grado satellitare; precisione angolare 0.05° (statico), 0.1° (dinamico).
-
Hardware di alta qualità: MCU core a 48 MHz, chip di alimentazione stabile, pad in rame con immersione in oro, sensore MEMS integrato.
-
Compatto &e leggero: 15,24 × 15,24 × 2 mm, ~1 g; supporto per montaggio orizzontale/verticale.
-
Velocità di trasmissione dati &e baud selezionabili: 20 Hz / 100 Hz tasso di ritorno; 9600 / 115200 bps.
-
App Android + software Windows: tracciamento in tempo reale, registrazione, visualizzazione dati grezzi, esportazione TXT, visualizzatore demo 3D e configurazione ricca (larghezza di banda, tasso di uscita, posizionamento, soglie, sonno, reset asse Z).
-
SDK &e esempi: Matlab, Python, Raspberry Pi, STM32, ROS, Arduino, C/C++.
-
Documentazione &e strumenti: scheda tecnica, manuale, MiniIMU.exe, driver CH340/CP2102, video dimostrativi.
-
Qualità &e supporto: rapporto di calibrazione della fabbrica mostrato; RoHS, CE, ISO 9001.
Specifiche tecniche
| Articolo | Dettagli |
|---|---|
| Modello / Marca | WT61 / WitMotion |
| Tensione di alimentazione | 3.3 V ~ 5 V |
| Corrente | < 10 mA |
| Interfaccia | Seriale TTL |
| Contenuto dell'uscita | Accelerazione a 3 assi, velocità angolare a 3 assi, angolo |
| Intervallo di accelerazione | ±2/±4/±8/±16 g (adattivo) |
| Intervallo del giroscopio | ±2000 °/s |
| Intervallo angolare | X, Z: ±180°; Y: ±90° |
| Accuratezza angolare | X/Y statico 0.05°; dinamico 0.1° |
| Stabilità (bias) | Acc: 0.01 g; Giroscopio: 0.05 °/s; Angolo (XY): 0.01° |
| Percentuale di Ritorno | 20 Hz / 100 Hz |
| Velocità di Baud | 9600 / 115200 bps |
| Risoluzione di Accelerazione | ±2 g: 0.061 mg/LSB (16384 LSB/g); ±4 g: 0.12 mg/LSB (8192 LSB/g); ±8 g: 0.25 mg/LSB (4096 LSB/g); ±16 g: 0.5 mg/LSB (2048 LSB/g) |
| Dimensioni / Peso | 15.24 × 15.24 × 2 mm (0.6″ × 0.6″ × 0.08″) / ~1 g |
| Temperatura di Funzionamento | –40 °C a +85 °C |
| Definizione dell'asse | Coordinate cartesiane, regola della mano destra |
| Montaggio | Orizzontale o Verticale |
Pinout &e Meccanico
Contorno della scheda (mm): A = 15.24, B = 15.24, C = 2.54, D = 12.7, E = 2.
Pins:
| # | Nome | Funzione |
|---|---|---|
| 1 | D0 | NC riservato |
| 2 | VCC | 3.3–5 V |
| 3 | RT | Dati seriali in ingresso, livello TTL |
| 4 | TX | Dati seriali in uscita, livello TTL |
| 5 | GND | Terra |
| 6 | SWIM | Interfaccia dati SWIM |
| 7 | D2 | NC riservato |
| 8 | VCC | 3.3–5 V |
| 9 | SCL | NC riservato |
| 10 | SDA | NC riservato |
| 11 | GND | Terra |
| 12 | D3 | NC riservato |
Schema di cablaggio MCU (diagramma mostrato): TTL seriale a MCU host con TX↔RX incrociato (VCC, TX, RX, GND).
Software, App &e Strumenti
-
App Android: connettersi tramite USB-to-TTL + OTG del telefono; grafici in tempo reale per Acc/Gyro/Angolo; Registrare pulsante; menu moduli (3-assi / 6-assi / 9-assi / BLE5.0 / WT901-WIFI); pagine Config ricche (calibrazione acc, direzione di installazione, tasso di recupero, larghezza di banda di misurazione, soglia di rilevamento statico, selezione del modello).
-
PC Windows (MiniIMU.exe): indicator di atteggiamento in tempo reale, curve in tempo reale (“Misurazione Dati Solida”), Archiviazione Dati &e Esportazione (dati grezzi e analizzati in formato TXT/CSV), Menu di Configurazione (baudrate 115200, modalità=Seriale, selezione direzione, larghezza di banda e.g., 94 Hz, sonno, ripristina l'asse Z a 0°).
-
Demo 3D: visualizza il movimento del sensore; codice sorgente 3D offerto (come indicato).
-
Dispositivo di test: morsetto plug-and-play opzionale per cablaggio senza saldatura (venduto separatamente).
Algoritmi &e Prestazioni
-
Algoritmo WitMotion × Filtro di Kalman: derivato da Metodi di Determinazione dell'Atteggiamento Satellitare Aerospaziale; combina fusione cinetica, filtraggio digitale, stima dello stato; fornisce il dichiarato 0.05°/0.1° precisione angolare e eccellente stabilità del bias/basso rumore (grafico e badge mostrati).
Applicazioni tipiche
Dispositivi IoT, monitoraggio ambientale, protezione delle strutture edilizie, robotica &e automazione, petrolio &e energia, macchine mobili, industria mineraria, elettronica di consumo, dispositivi VR.
Conformità &e Supporto
-
Certificati mostrati: Rapporto di calibrazione, RoHS, CE, ISO 9001.
-
Note sulla scheda comparativa: testato in fabbrica prima della spedizione, SDK disponibile, garanzia di 12 mesi, supporto tecnico a vita da WitMotion R&e D.
Note &e Accessori
-
Incluso: modulo WT61.
-
Opzionale: convertitore USB-to-TTL, adattatore OTG per telefono, fixture di test morsetto.
-
Utilizzare la convenzione delle coordinate destra e seguire le istruzioni di installazione orizzontale/verticale mostrate nel software per la massima precisione.
Dettagli

WitMotion WT61 IMU fornisce un'accuratezza di inclinazione di 0,05 gradi, filtraggio digitale, algoritmo di fusione e include caratteristiche di accelerazione, giroscopio, angolo, vibrazione, MCU e filtraggio.

WitMotion WT61 IMU offre uscita di accelerazione, giroscopio e angolo a 3 assi. Supporta 3.3V-5V, bassa corrente, seriale TTL, intervallo adattivo di ±2/4/8/16g, alta precisione, dimensioni compatte, peso leggero e ampio intervallo di temperatura.

WitMotion WT61 IMU offre alta precisione con filtraggio di Kalman, le certificazioni includono RoHS, CE, ISO-9001. Caratteristiche: MCU a 48MHz, sensore MEMS, chip di alimentazione stabile e interfaccia in rame immersa in oro.

Algoritmo WitMotion x Filtro di Kalman. L'algoritmo WitMotion origina dall'Algoritmo di Determinazione dell'Attitudine dei Satelliti Aerospaziali, combinato con il filtraggio di Kalman e la fusione dinamica del movimento. Precisione angolare: asse X, Y: 0,05° (Statico), 0,1° (Dinamic). Il grafico mostra i dati angolari nel tempo, con linee blu, rosse e gialle che rappresentano diverse misurazioni o output filtrati. I timestamp variano da 15:21:09:210 a 15:21:15:223. L'asse verticale va da -180 a 180 gradi.

WitMotion WT61 IMU per IoT, monitoraggio ambientale, robotica, automazione, estrazione mineraria, ponti, gadget VR e applicazioni industriali.

WitMotion IMU offre alta precisione, stabilità, dimensioni compatte, componenti superiori, SDK, test in fabbrica e supporto a vita.Include il filtraggio di Kalman, l'algoritmo di fusione e una garanzia di 12 mesi, superando gli altri.

Il WitMotion WT61 IMU presenta un layout a 12 pin con VCC, GND, TX, RX, SCL, SDA, SWIM e porte riservate; include dettagli sulle dimensioni in mm.

Il WitMotion WT61 IMU si collega tramite USB a un adattatore OTG per la visualizzazione e la registrazione dei dati dello smartphone. L'app Android multifunzionale visualizza i dati dei sensori in tempo reale, inclusi angoli, accelerazione e timestamp, con opzioni per la configurazione e la registrazione dei dati.

Il WitMotion WT61 IMU offre un facile setup, funzionalità plug-and-play e misurazioni dell'atteggiamento in tempo reale con letture angolari.

Il WitMotion WT61 IMU offre calibrazione, misurazione in tempo reale e esportazione dei dati. Visualizza e memorizza accelerazione, velocità angolare, campo magnetico e dati grezzi in formato TXT.

Le dimostrazioni 3D mostrano il movimento del sensore in modo intuitivo. L'SDK supporta Matlab, Python, Raspberry Pi, STM32, ROS, Arduino e C++/C#. Connessione seriale TTL con MCU; TX e RX sono incrociati.

La demo 3D visualizza il movimento del sensore con modelli di auto, casco, cubo e drone. L'SDK supporta Matlab, Python, Raspberry Pi, STM32, ROS, Arduino e C++/C#. La connessione seriale tramite TTL collega MCU e modulo con TX e RX incrociati.

Il test IMU include un giradischi a 3 assi, vibrazioni, temperature estreme, invecchiamento e valutazioni ad alta temperatura.


Il WitMotion WT61 IMU offre un tasso di ritorno di 20-100Hz, tensione di 3.3-5V e rileva accelerazione, angolo e giroscopio. Supporta interfaccia TTL, compatibile con Android, PC, MCU e Arduino.
Related Collections