












WitMotion WT901C-485 IMU 9 assi Accelerometro Giroscopio Bussola Digitale (RS485/RS232/TTL), Precisione angolo 0,05°, AHRS 0,2–200 Hz
WitMotion WT901C-485 IMU 9 assi Accelerometro Giroscopio Bussola Digitale (RS485/RS232/TTL), Precisione angolo 0,05°, AHRS 0,2–200 Hz
RCDrone
Impossibile caricare la disponibilità di ritiro
Panoramica
Il WitMotion WT901C-485 è un compatto IMU AHRS a 9 assi basato su un suite di sensori di classe MPU9250 a tre assi (accelerometro + giroscopio + magnetometro) e sull'algoritmo di fusione/Kalman di WitMotion. Fornisce uscite di angolo, accelerazione, velocità angolare, campo magnetico e quaternione con precisione statica XY di 0,05° (dinamica 0,1°) e frequenza di aggiornamento regolabile da 0,2 a 200 Hz. Molteplici interfacce fisiche (RS485/RS232 Modbus & TTL UART) e ampi intervalli di ingresso rendono il WT901C-485 facile da integrare con Arduino/STM32/MCU, PC e controllori industriali. Il software ufficiale per Windows (MiniIMU.exe) fornisce grafici in tempo reale, demo 3D, registrazione/esportazione dei dati e calibrazione magnetica visiva.
Caratteristiche principali
-
Uscite a 9 assi: angolo (Roll/Pitch/Yaw), 3 assi acc/gyro/mag, quaternione.
-
Alta stabilità &e precisione: XY 0.05° statico, 0.1° dinamico; stabilità di accelerazione 0.01 g.
-
Ingresso/uscita flessibile: TTL / RS232 / RS485 (Modbus); baud 4,800–230,400 (predefinito 9,600).
-
Frequenza regolabile: 0.2–200 Hz (predefinito 10 Hz).
-
Ampia alimentazione: TTL 3.3–5 V, RS232/RS485 5–36 V; <25 mA tipico.
-
Strumenti &e SDK: app per Windows, app per Android, driver CH340/CP2102, codice di esempio per C/C++/STM32/Arduino/Matlab.
-
Calibrazione magnetica &e demo 3D per la configurazione iniziale; grafici in tempo reale ed esportazione TXT.
-
Design industriale: –40~85 °C, 51×36×15 mm, montaggio verticale o orizzontale.
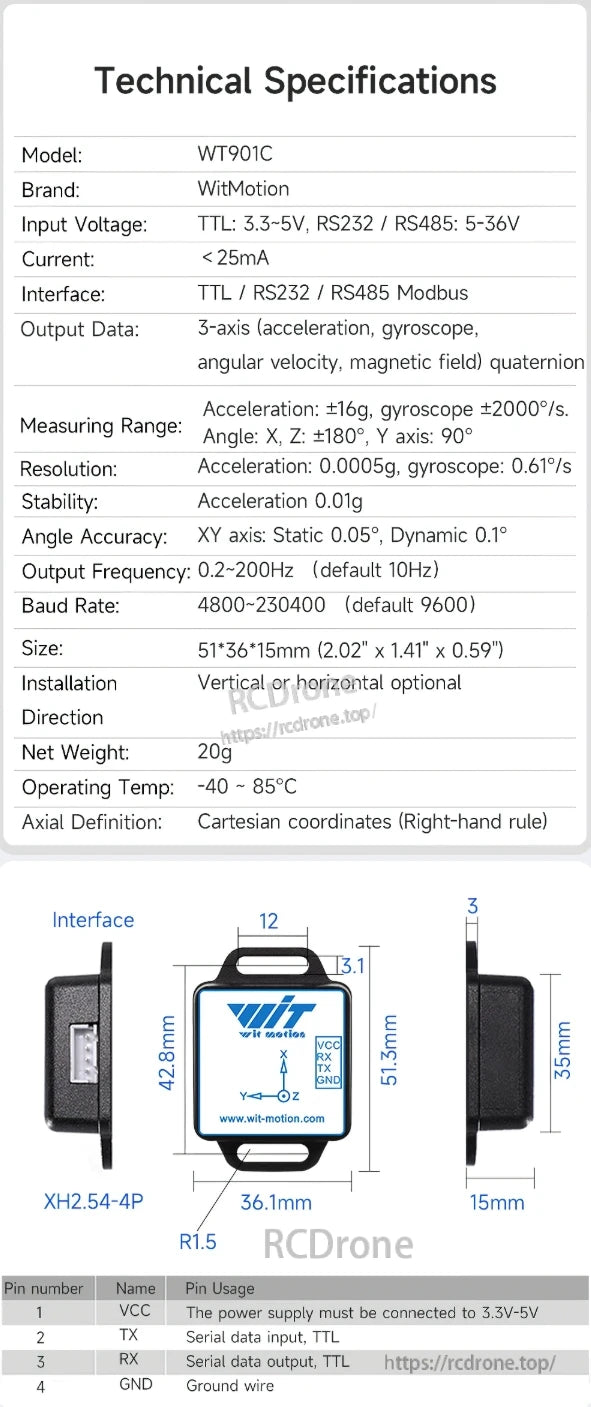
Specifiche tecniche
| Articolo | Spec |
|---|---|
| Modello | WT901C (variante WT901C-485) |
| Interfacce | TTL / RS232 / RS485 (Modbus) |
| Tensione di ingresso | TTL: 3.3–5 V; RS232/RS485: 5–36 V |
| Corrente | < 25 mA |
| Dati di uscita | Accelerazione, velocità angolare, campo magnetico, angolo, quaternione |
| Intervalli di misura | Acc ±16 g, Gyro ±2000 °/s; Angolo: X,Z ±180°, Y 90° |
| Risoluzione | Acc 0.0005 g, Gyro 0.61 °/s |
| Stabilità | Accelerazione 0.01 g |
| Precisione angolare | XY statico 0.05°, dinamico 0.1° |
| Frequenza di uscita | 0.2–200 Hz (predefinito 10 Hz) |
| Velocità di trasmissione | 4.800–230.400 (predefinito 9.600) |
| Dimensioni / peso | 51×36×15 mm, 20 g |
| Temperatura di funzionamento | –40 ~ 85 °C |
| Assi | Cartesiano, regola della mano destra |
| Installazione | Verticale o orizzontale |
Frame angolare (0x55 0x53) – protocollo di output
| Indice byte | Contenuto | Significato |
|---|---|---|
| 0 | 0x55 | Intestazione pacchetto |
| 1 | 0x53 | ID frame “Angolo” |
| 2–3 | RollL/RollH | Angolo dell'asse X (basso/alto) |
| 4–5 | PitchL/PitchH | Angolo dell'asse Y (basso/alto) |
| 6–7 | YawL/YawH | Angolo dell'asse Z (basso/alto) |
| 8 | VL | Versione del firmware bassa |
| 9 | VH | Versione del firmware alta |
| 10 | Somma | Checksum |
Decodifica dell'angolo
Roll (°) = ((RollH << 8) | RollL) / 32768 × 180
Pitch (°) = ((PitchH << 8) | PitchL) / 32768 × 180
Yaw (°) = ((YawH << 8) | YawL) / 32768 × 180
Checksum
Somma = 0x55 + 0x53 + RollL + RollH + PitchL + PitchH + YawL + YawH + VL + VH.
(Le cornici di accelerazione e velocità angolare seguono lo stesso stile di layout—vedi manuale.)
Dimensioni &e Connettore
Dimensioni dell'involucro: 51 × 36 × 15 mm (H × L × P), con orecchie di montaggio; peso ≈ 20 g.
Connettore: XH2.54-4P (header della scheda sul sensore).
Pinout (versione TTL)
| Pin | Nome | Descrizione |
|---|---|---|
| 1 | VCC | Ingresso di alimentazione 3.3–5 V |
| 2 | TX | Ingresso dati seriali, livello TTL |
| 3 | RX | Uscita dati seriali, livello TTL |
| 4 | GND | Terra |
Note: Utilizzare livelli TTL per integrazione diretta con MCU. Le varianti RS232/RS485 utilizzano i rispettivi livelli di tensione e standard di cablaggio.
Software &e strumenti
-
MiniIMU.exe (Windows): configurazione (algoritmo, direzione di installazione, intervalli, larghezza di banda), grafici in tempo reale, visualizzazione raw/hex, registrazione dati e esportazione TXT.
-
Demo 3D: visualizza l'orientamento in tempo reale (sorgente disponibile).
-
Calibrazione magnetica visiva: assistente per l'adattamento ellittico per rimuovere il bias (raccomandato per il primo utilizzo).
-
Driver &e codice: driver CH340/CP2102; esempi per STM32, Arduino, C/C++, Matlab; app Android; video dimostrativi per PC/telefono.
Applicazioni tipiche
Automazione e robotica, piattaforme di livellamento, monitoraggio dell'angolo di inclinazione, monitoraggio delle vibrazioni, elettronica di consumo, integrazione di sistemi IoT, test industriali, visori VR/AR.
Dettagli

AHRS IMU economico con precisione di 0,05° sugli assi X Y. Caratteristiche di inclinazione, vibrazione, rilevamento dell'atteggiamento utilizzando l'algoritmo di fusione WitMotion. Include funzioni di accelerazione, giroscopio, angolo, magnetico, filtraggio di Kalman e quaternioni.
Il sensore IMU WitMotion WT901C offre accelerazione a 3 assi, giroscopio, velocità angolare e rilevamento del campo magnetico. Supporta interfacce TTL/RS232/RS485, ha un intervallo di accelerazione di ±16g, giroscopio di ±2000°/s, precisione angolare statica di 0,05° e opera tra -40°C e 85°C.

Il sensore IMU WitMotion WT901C offre automazione, visori VR, livellamento e monitoraggio delle vibrazioni. Le applicazioni includono elettronica di consumo, integrazione IoT, test industriali e AR/VR. Il software gratuito fornisce misurazioni dell'atteggiamento facili da usare con dati angolari in tempo reale.
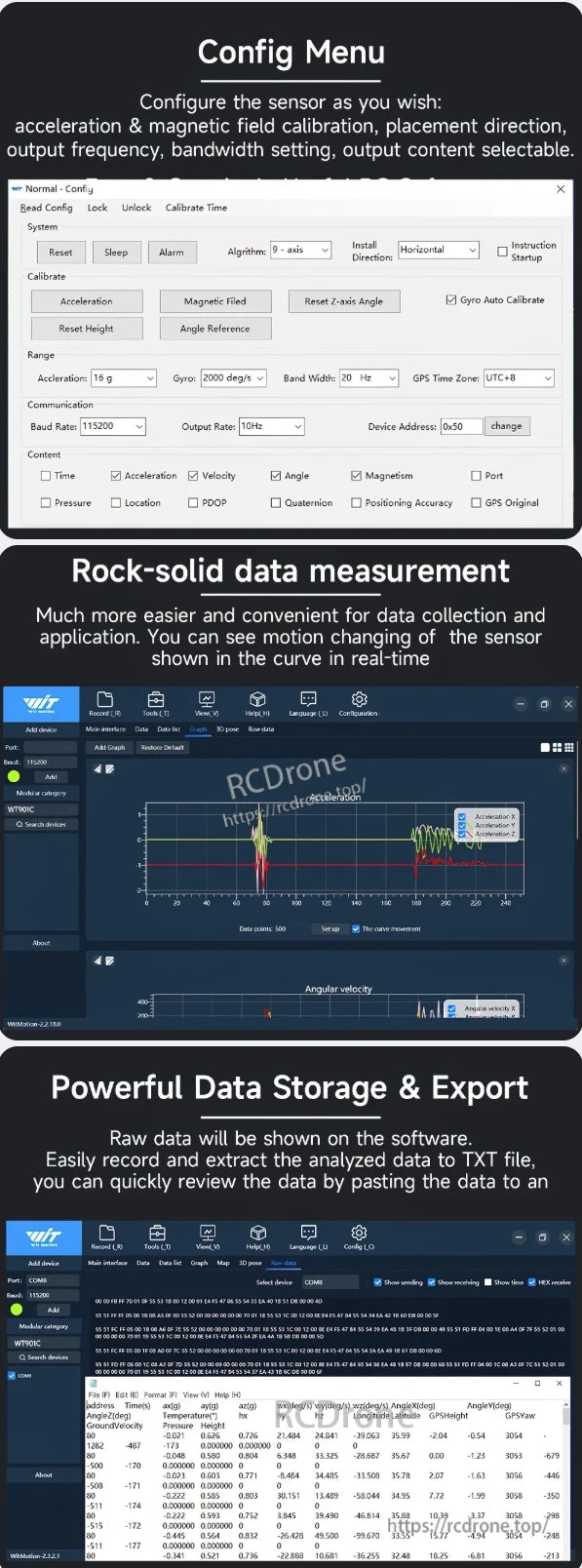
Il sensore IMU WitMotion WT901C offre impostazioni configurabili per accelerazione, campo magnetico e orientamento. Fornisce visualizzazione dei dati in tempo reale, misurazioni robuste e supporta l'archiviazione/esportazione dei dati in formato TXT per analisi.
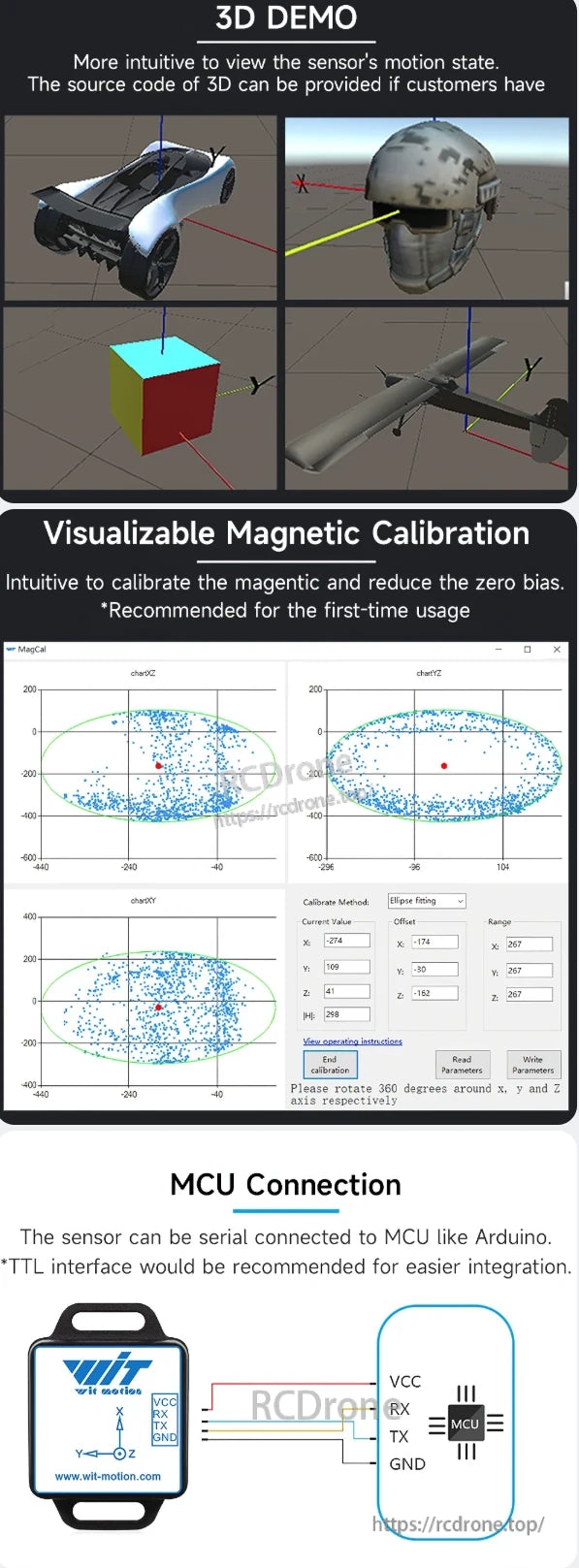
La demo 3D visualizza il movimento del sensore con modelli di auto, casco, cubo e drone. L'interfaccia di calibrazione magnetica consente una regolazione intuitiva. I dettagli di connessione MCU presentano un'interfaccia TTL per Arduino, con pin VCC, RX, TX, GND etichettati.

I kit di sviluppo includono software gratuito per Windows, driver, manuali e codici di esempio per STM32, Arduino, C++, MATLAB. Presenta PDF, video dimostrativi e supporto per app Android per il sensore IMU WT901C.
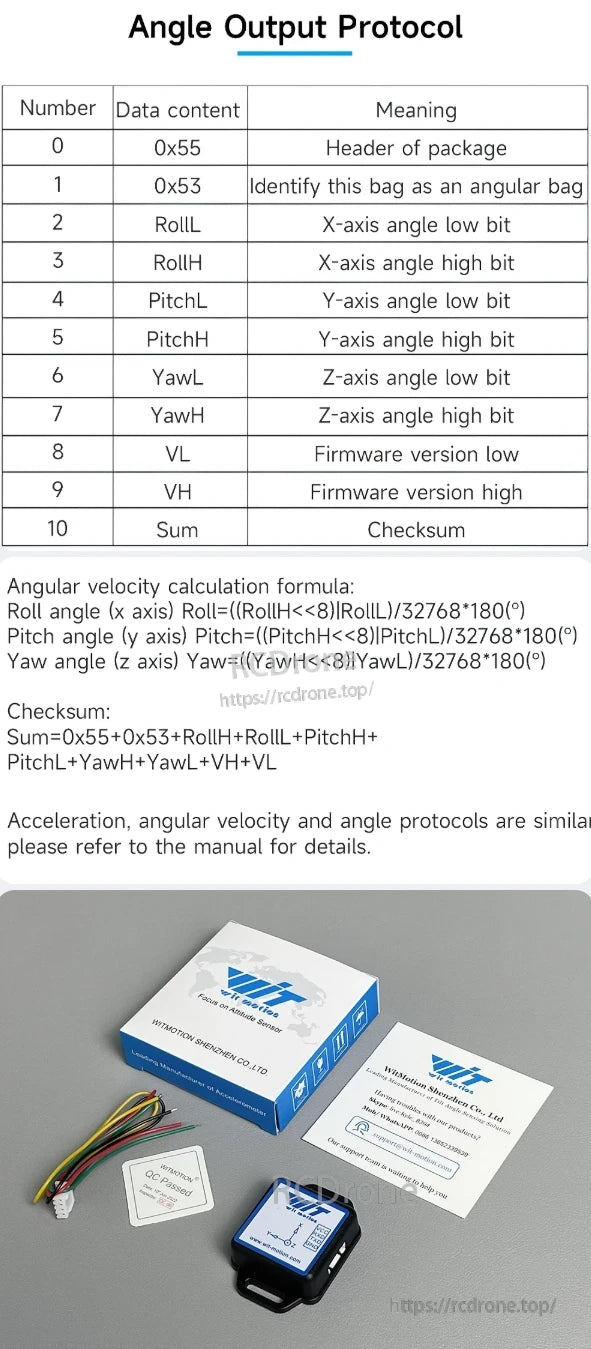
Dettagli del protocollo di output angolare del sensore IMU WT901C: struttura dei dati, calcoli angolari, formula di checksum, imballaggio. Presenta angoli di rollio, beccheggio, imbardata, versione del firmware e checksum.
Related Collections












