









WitMotion WT901C 9-Assi AHRS IMU — Accelerometro Giroscopio Magnetometro con Angolo & Quaternione, Precisione 0,05°, 0,2–200 Hz, TTL/RS232/RS485 Modbus
WitMotion WT901C 9-Assi AHRS IMU — Accelerometro Giroscopio Magnetometro con Angolo & Quaternione, Precisione 0,05°, 0,2–200 Hz, TTL/RS232/RS485 Modbus
WitMotion
Impossibile caricare la disponibilità di ritiro
Panoramica
Il WitMotion WT901C è un IMU AHRS compatto a 9 assi che combina un accelerometro a 3 assi, un giroscopio a 3 assi e un magnetometro a 3 assi con il filtraggio di fusione/Kalman di WitMotion per fornire angoli (roll/pitch/yaw), velocità angolare, accelerazione, campo magnetico e quaternioni. Offre un'accuratezza statica XY di 0.05° (0.1° dinamica), supporta tassi di aggiornamento da 0.2 a 200 Hz e comunica tramite TTL, RS232 o RS485 (Modbus)—ideale per la misurazione di inclinazione, vibrazione e atteggiamento in automazione, piattaforme di livellamento, VR/AR e test industriali.
Caratteristiche principali
-
AHRS ad alta precisione: accuratezza statica XY 0.05°, dinamica 0.1°; assi cartesiani destrosi.
-
Ampia I/O &e tensione: TTL 3.3–5 V, RS232/RS485 5–36 V, baud 4 800–230 400 (predefinito 9 600).
-
Uscita configurabile: 0.2–200 Hz (predefinito 10 Hz); contenuti selezionabili dall'utente.
-
Dati completi a 9 assi: Accelerazione, velocità angolare, campo magnetico, angolo & quaternione.
-
Strumenti di visualizzazione: Software Windows MiniIMU con grafici in tempo reale, registrazione/esportazione di dati grezzi (TXT), demo di movimento 3D, e calibrazione magnetica visiva.
-
Risorse per sviluppatori: Driver (CH340/CP2102), manuali/fogli informativi, codice di esempio per 51/C++/STM32/Arduino/Matlab, e app Android.
-
Installazione flessibile: Montaggio verticale o orizzontale; compatto 51 × 36 × 15 mm, ~20 g.
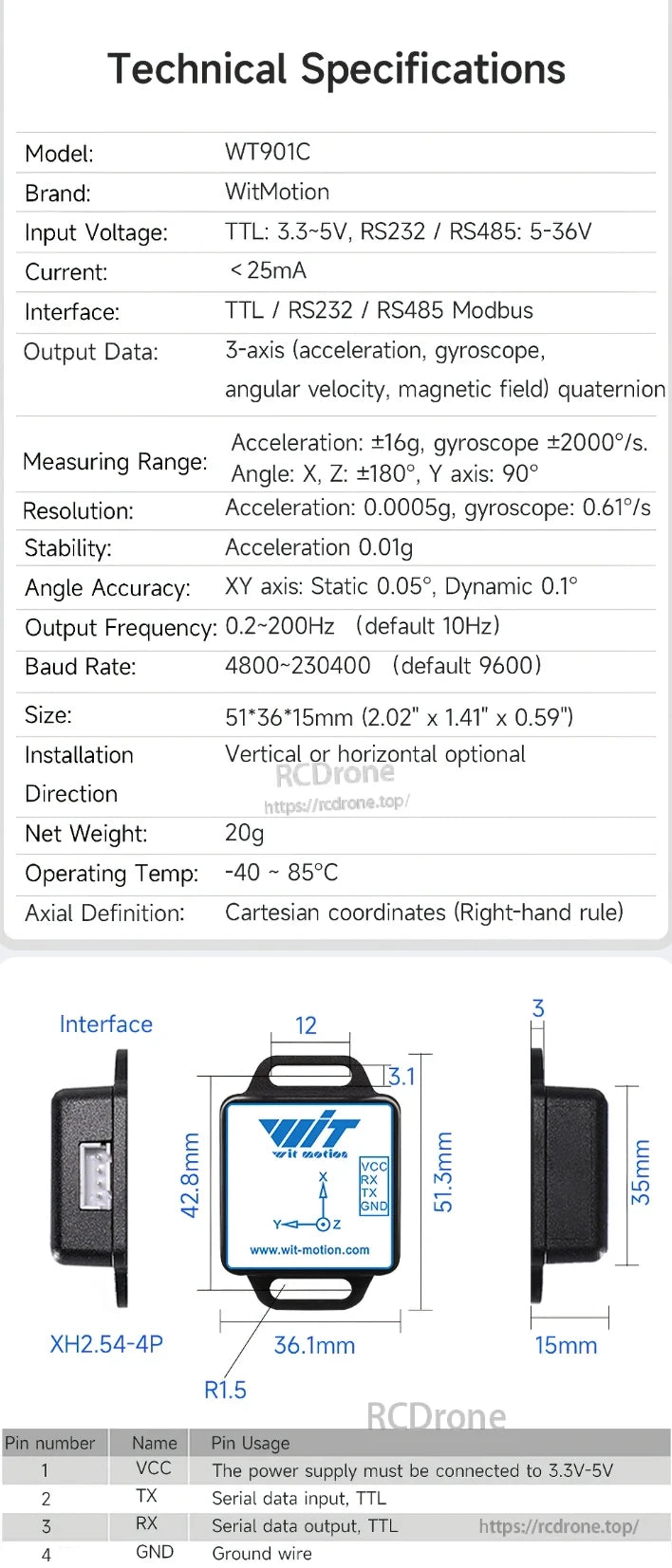
Specifiche tecniche
-
Modello/Marchio: WT901C / WitMotion
-
Interfacce: TTL / RS232 / RS485 (Modbus)
-
Tensione di ingresso: TTL: 3.3–5 V; RS232/RS485: 5–36 V
-
Corrente: < 25 mA
-
Dati di uscita: accelerazione a 3 assi, giroscopio (velocità angolare), campo magnetico, angolo, quaternione
-
Intervallo di misura: Acc ±16 g; Giroscopio ±2000 °/s; Angolo X,Z ±180°, Y 90°
-
Risoluzione: Acc 0.0005 g; Giroscopio 0.61 °/s
-
Stabilità: Acc 0.01 g
-
Precisione angolare: XY statico 0.05°, dinamico 0.1°
-
Frequenza di uscita: 0.2–200 Hz (predefinito 10 Hz)
-
Velocità di trasmissione: 4 800–230 400 (predefinito 9 600)
-
Dimensioni / Peso: 51 × 36 × 15 mm / ≈ 20 g
-
Temperatura di funzionamento: −40 ~ 85 °C
-
Definizione degli assi: coordinate cartesiane, regola della mano destra
Dimensioni &e connettore (versione TTL)
-
Corpo: 51.3 mm (H) × 36.1 mm (L) × 15 mm (P); raggio delle orecchie di montaggio R1.5
-
Connettore: XH2.54-4P
-
Pinout (sinistra→destra sull'etichetta VCC/RX/TX/GND):
-
VCC — alimentazione 3.3–5 V
-
TX — Ingresso dati seriali, TTL
-
RX — Uscita dati seriali, TTL
-
GND — terra
-
Nota: Il grafico degli assi è stampato sul corpo (X↑, Y→, Z•), facilitando l'allineamento.
Protocollo di uscita angolare (frame 0x55 0x53)
| Byte | Contenuto | Significato |
|---|---|---|
| 0 | 0x55 | Intestazione |
| 1 | 0x53 | ID del frame angolare |
| 2–3 | RollL/RollH | Angolo dell'asse X |
| 4–5 | PitchL/PitchH | Angolo dell'asse Y |
| 6–7 | YawL/YawH | Angolo dell'asse Z |
| 8–9 | VL/VH | Versione del firmware (bassa/alta) |
| 10 | Somma | Checksum |
Conversione angolare:Roll = ((RollH<<8)|RollL)/32768*180°Pitch = ((PitchH<<8)|PitchL)/32768*180°Yaw = ((YawH<<8)|YawL)/32768*180°
(Le cornici di accelerazione e velocità angolare sono simili; vedere il manuale.)
Software &e strumenti
-
Windows (MiniIMU.exe): configurazione del dispositivo (intervalli, larghezza di banda, frequenza di uscita), grafici in tempo reale, visualizzazione dei dati grezzi, visualizzazione della posa 3D, esportazione in TXT.
-
Calibrazione MC: flusso di lavoro visivo per adattamento ellittico per ridurre il bias (rotazione attorno a X/Y/Z).
-
Integrazione MCU: connessione seriale diretta; TTL raccomandato per un semplice collegamento MCU (Arduino/STM32, ecc.).
-
Risorse incluse: Datasheet.pdf, Manual.pdf, driver CH340 &e CP2102, codice di esempio, App Android, video dimostrativi.
Applicazioni tipiche
Automazione | Monitoraggio inclinazione/livello | Monitoraggio vibrazioni | Piattaforme di livellamento | Integrazione di sistemi IoT | Test industriali | visori VR/AR | Elettronica di consumo.
Dettagli

AHRS IMU economico con un'accuratezza di 0,05° sugli assi X e Y. Include sensori di inclinazione, vibrazione e atteggiamento utilizzando l'algoritmo di fusione WitMotion. Include accelerazione, giroscopio, angolo, magnetico, filtraggio di Kalman e funzioni di quaternione.
WitMotion WT901C IMU offre rilevamento a 3 assi con accelerazione, giroscopio e magnetometro. Fornisce output in quaternione. Supporta TTL, RS232, RS485. Misura ±16g, ±2000°/s, angoli ±180°. Dimensioni compatte di 51×36×15mm. Funziona da -40 a 85°C.

WitMotion WT901C IMU supporta automazione, visori VR, livellamento e monitoraggio delle vibrazioni. È adatto per elettronica di consumo, IoT, test industriali e AR/VR. Viene fornito con software gratuito per la visualizzazione dei dati angolari in tempo reale.

Il menu di configurazione IMU WitMotion WT901C consente la calibrazione del sensore, le impostazioni di output dei dati e la visualizzazione del movimento in tempo reale. Supporta l'algoritmo a 9 assi, accelerazione regolabile, giroscopio, larghezza di banda, fuso orario GPS. I grafici in tempo reale mostrano l'accelerazione e la velocità angolare per misurazioni precise.
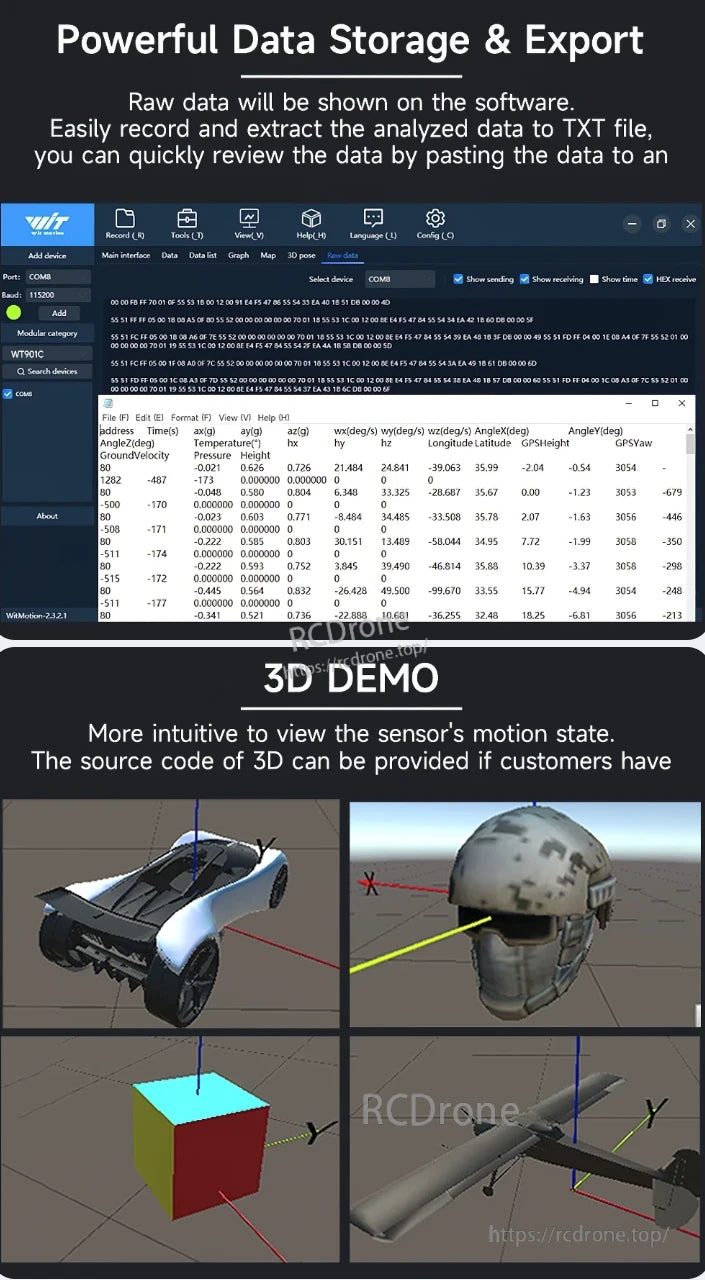
WitMotion WT901C IMU offre un potente storage dei dati, facile esportazione in formato TXT e visualizzazione del movimento 3D con codice sorgente disponibile.
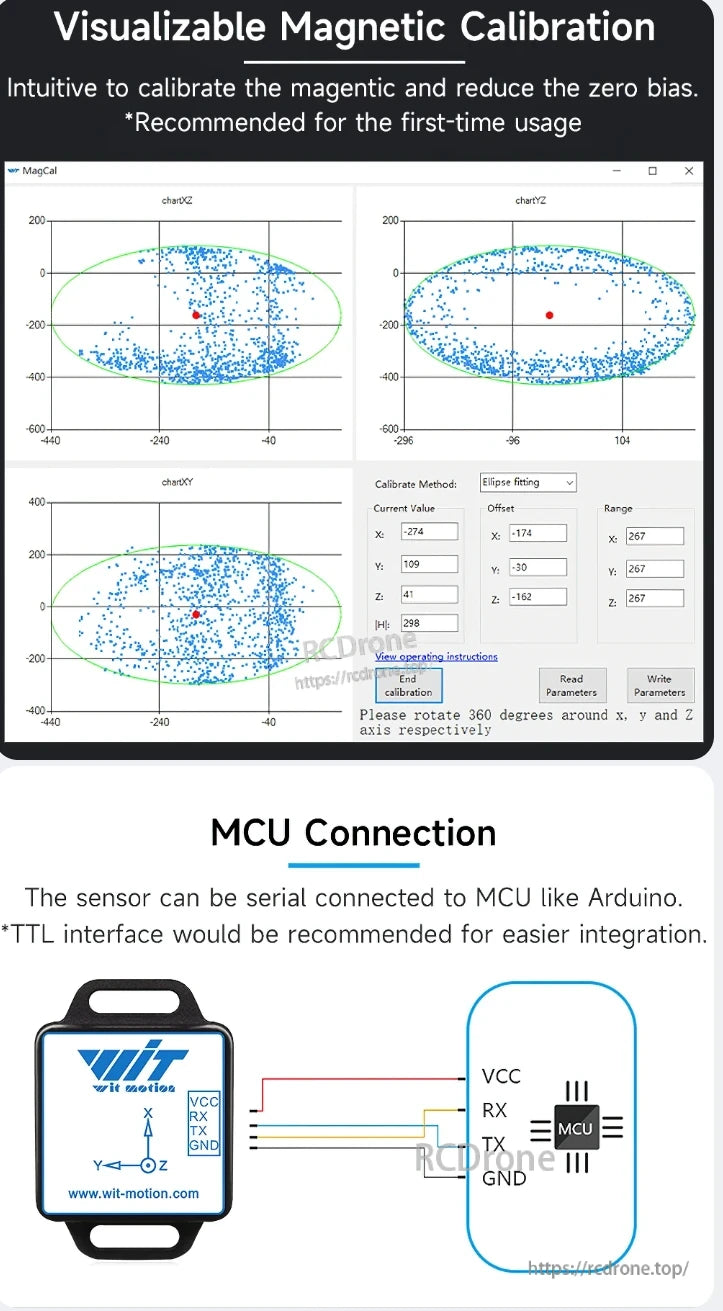
Calibrazione magnetica visualizzabile per WT901C IMU con metodo di adattamento ellittico. Si consiglia la connessione MCU tramite interfaccia TTL. Il sensore si collega a MCU simili ad Arduino utilizzando i pin VCC, RX, TX, GND.
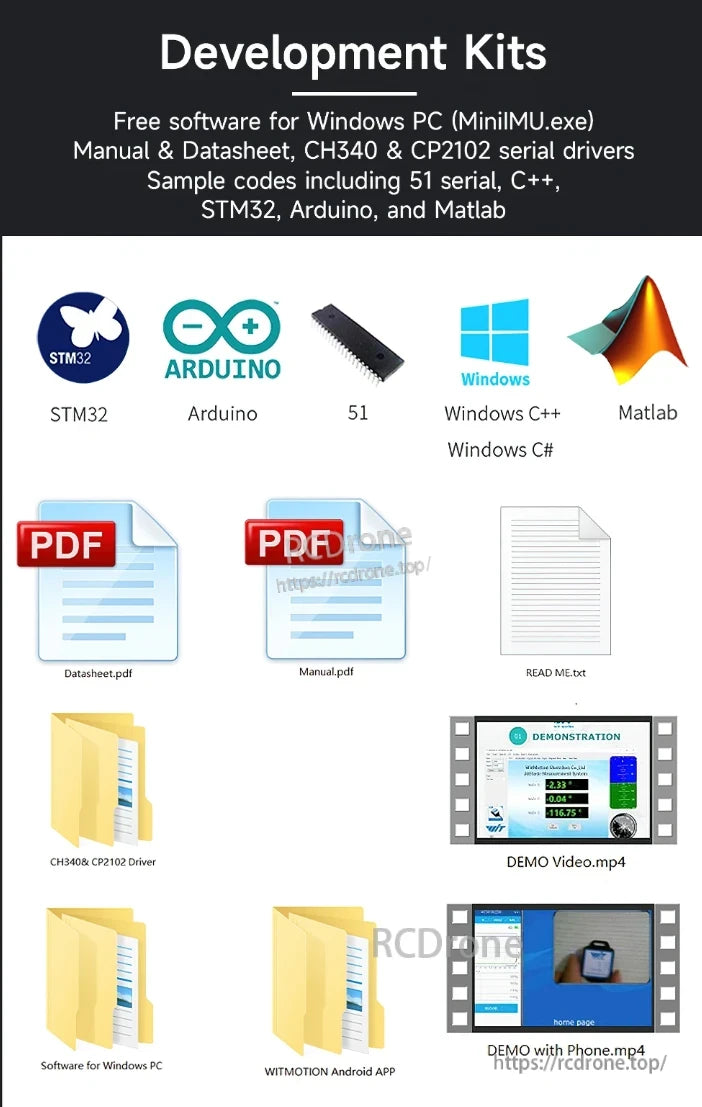
I kit di sviluppo includono software gratuito per Windows, manuale, scheda dati, driver CH340 & CP2102, codici di esempio per 51, C++, STM32, Arduino e Matlab, insieme a video dimostrativi e app per Android.
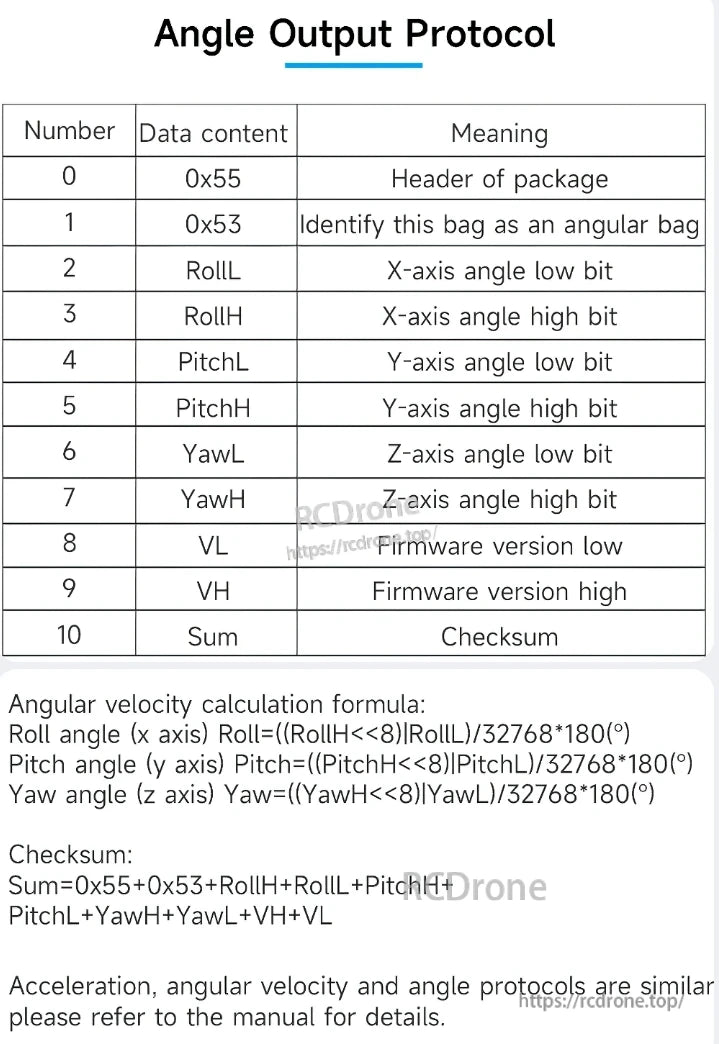
La struttura dei dati per l'output dell'angolo IMU WT901C include intestazione, rollio, beccheggio, imbardata, versione del firmware e checksum. Sono fornite formule per i calcoli e la verifica. Strutture simili esistono per l'accelerazione e la velocità angolare.
Related Collections









