





WitMotion WTGAHRS3 Sensore Angolare 6 Assi GPS-IMU AHRS/INS, Accelerometro Giroscopio, RS485/TTL, Beidou+GPS, IP67, Filtro Kalman
WitMotion WTGAHRS3 Sensore Angolare 6 Assi GPS-IMU AHRS/INS, Accelerometro Giroscopio, RS485/TTL, Beidou+GPS, IP67, Filtro Kalman
WitMotion
Impossibile caricare la disponibilità di ritiro
Panoramica
WTGAHRS3 è un sensore di atteggiamento di navigazione inerziale professionale che fonde un IMU a 6 assi con posizionamento satellitare ad alta precisione. Integra un accelerometro, un giroscopio e un risolutore di atteggiamento con filtraggio di Kalman per un'uscita angolare stabile e ad alta precisione, e (nelle versioni GPS) riporta latitudine/longitudine e velocità di terra. Il corpo è in alluminio con protezione IP67 contro polvere/acqua, un'interfaccia per antenna esterna e un cavo schermato per una robusta integrità del segnale. Sono forniti software per PC e codice di esempio (Windows C/C#, STM32, 51, MATLAB) per un'integrazione rapida.
Prestazioni fondamentali
-
Precisione dell'atteggiamento: statico 0.05°, dinamico 0.1° (serie spec)
-
Intervallo IMU: accelerazione ±16 g; giroscopio ±500 °/s; intervallo angolare ±180°
-
Uscite: tempo, accelerazione, velocità angolare, angolo di Eulero; le versioni GPS aggiungono latitudine, longitudine, velocità di terra
-
Filtri/algoritmi: filtraggio digitale, filtro di Kalman, stima cinetica/stato
-
Navigazione: GPS integrato GPS + BeiDou (BDS) con ricezione multi-costellazione opzionale e navigazione inerziale ad alta precisione al chiuso (fusione IMU)
-
Involucro: alluminio, IP67; porta antenna esterna; cavo schermato
Gamma di modelli & interfacce dati
-
WTGAHRS3-TTL/232 — Livello seriale TTL/RS-232, IMU ad alta velocità + fusione dell'orientamento; orientamento preciso anche senza GPS.
-
WTGAHRS3-485 — interfaccia industriale RS485, protocollo MODBUS; integra i dati IMU per un posizionamento puramente inerziale.
-
WTGAHRS3-GPS — Aggiunge GNSS multi-costellazione (BDS/GPS/GLONASS/Galileo/QZSS/SBAS) per l'output di latitudine/longitudine e velocità di terra.
Specifiche
Specifiche generali IMU (si applicano a tutti i modelli)
| Articolo | Spec |
|---|---|
| Assi misurati | 3-assi Acc, 3-assi Gyro, Angolo |
| Intervallo di misura | Acc ±16 g; Gyro ±500 °/s; Angolo ±180° |
| Precisione angolare | XY: 0.2°, Z: 0.5° |
| Contenuto di output | Tempo, accelerazione, giroscopio, angolo di Eulero (i modelli GPS forniscono anche latitudine/longitudine e velocità di terra) |
| Peso | 83.76 g |
| Lunghezza del cavo | 1 m |
Parametri WTGAHRS3-TTL/232
| Articolo | Spec |
|---|---|
| Interfaccia | Porta seriale (livello TTL/232) |
| Velocità di trasmissione | 4.800 ~ 921.600 bps |
Parametri WTGAHRS3-485
| Articolo | Spec |
|---|---|
| Tensione di alimentazione | 5–36 V |
| Corrente | < 50 mA |
| Velocità di trasmissione | 115.200 bps (configurabile 4.800 ~ 460.800) |
| Frequenza di aggiornamento | 1 Hz |
| Temperatura di funzionamento | −30 ~ +85 °C |
| Interfaccia dati | RS485 |
| Protocollo | MODBUS |
Parametri WTGAHRS3-GPS (GNSS)
| Articolo | Spec |
|---|---|
| Costellazioni | BDS/GPS/GLONASS/GALILEO/QZSS/SBAS |
| Canali RF | RF a 3 canali, supporta la ricezione a costellazione completa |
| TTFF (freddo/caldo/riacquisizione) | ≤32 s / ≤1 s / ≤1 s |
| Sensibilità | Freddo −148 dBm; Caldo −156 dBm; Riacquisizione −160 dBm; Tracking −162 dBm |
| Accuratezza della posizione | < 2.5 m (CEP50) |
| Precisione della velocità | < 0.1 m/s (1σ) |
| Aggiornamento della posizione | 1/2/5/10 Hz (predefinito 1 Hz) |
| Protocollo | NMEA 0183 |
| Altitudine / velocità massima | 18.000 m / 515 m/s |
| Consumo tipico GNSS | < 29 mA @ 3.3 V |
| Temperatura di funzionamento / stoccaggio | −40 ~ +85 °C / −45 ~ +125 °C |
Meccanico &e connettore
| Articolo | Spec |
|---|---|
| Dimensioni | ~40 mm × 34 mm corpo |
| Montaggio | Diametro del foro 3 mm, distanza dei fori 32 mm |
| Larghezza della piastra frontale | 26 mm (riferimento) |
| Pins etichettati | VCC / RXD / TXD / GND |
| Antenna | Antenna esterna porta (modelli GNSS) |
| Involucro | Alluminio, IP67, resistente a polvere/acqua/shock |
| Cavo | Filo con guaina schermata (anti-interferenza) |
Software &e sviluppo
-
Software per PC Windows: dashboard, registrazione dati, visualizzazione curve, visualizzazione modello 3D, configurazione.
-
Risorse: Guida dell'utente, Driver della porta seriale, Software per PC, programmi di esempio per STM32, 51, Windows C/C#, MATLAB.
Applicazioni tipiche
-
Robot mobili, AGV/AMR, veicoli industriali, piattaforme marine
-
UAV, gimbal, puntamento dell'antenna, carrelli per mappatura
-
Navigazione inertiale sotterranea/interna (RS485/TTL) e navigazione assistita da GNSS all'aperto (modello GPS)
Dettagli
Sensore di navigazione inerziale a sei assi con GPS e Beidou, dotato di rilevamento di accelerazione, giroscopio, angolo, longitudine, dimensione e velocità di terra.

Alta precisione e stabilità con filtraggio di Kalman, filtraggio digitale e stima dello stato. Supporta il sistema Beidou cinese e U.S. GPS per una posizione accurata, misurazione della longitudine, latitudine e velocità di terra.
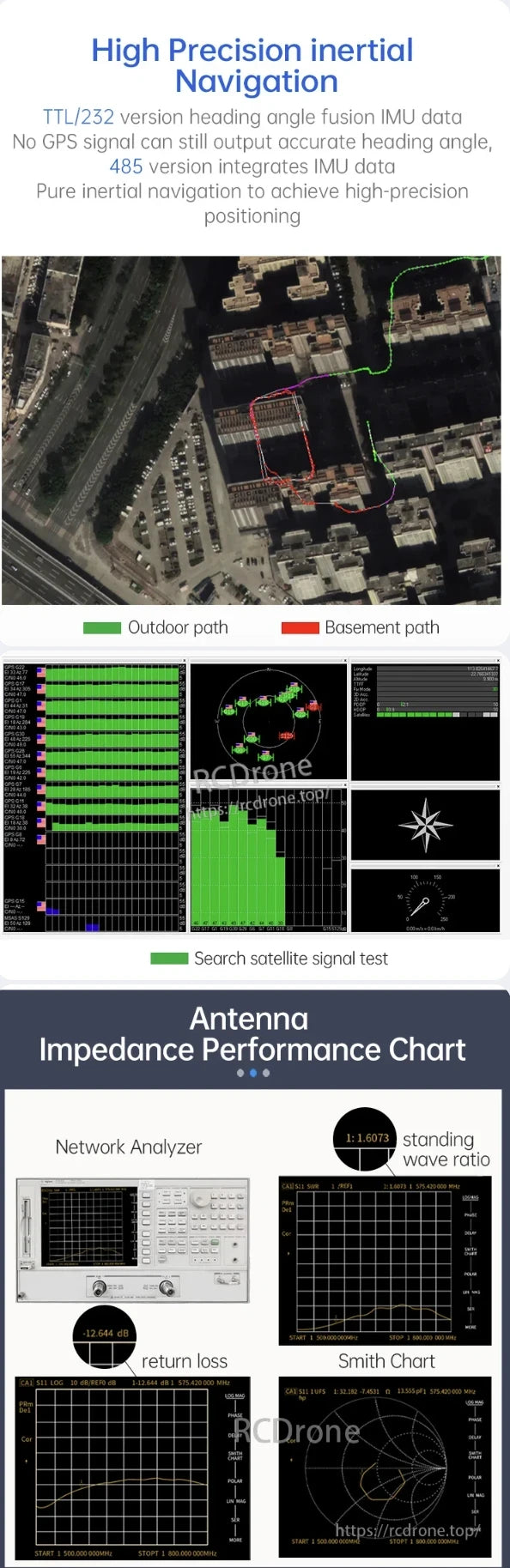
Navigazione inerziale ad alta precisione con fusione dei dati IMU, che consente un'accurata direzione senza GPS. Presenta prestazioni di impedenza dell'antenna, risultati dell'analizzatore di rete, perdita di ritorno, rapporto d'onda stazionaria e diagramma di Smith per l'integrità del segnale.
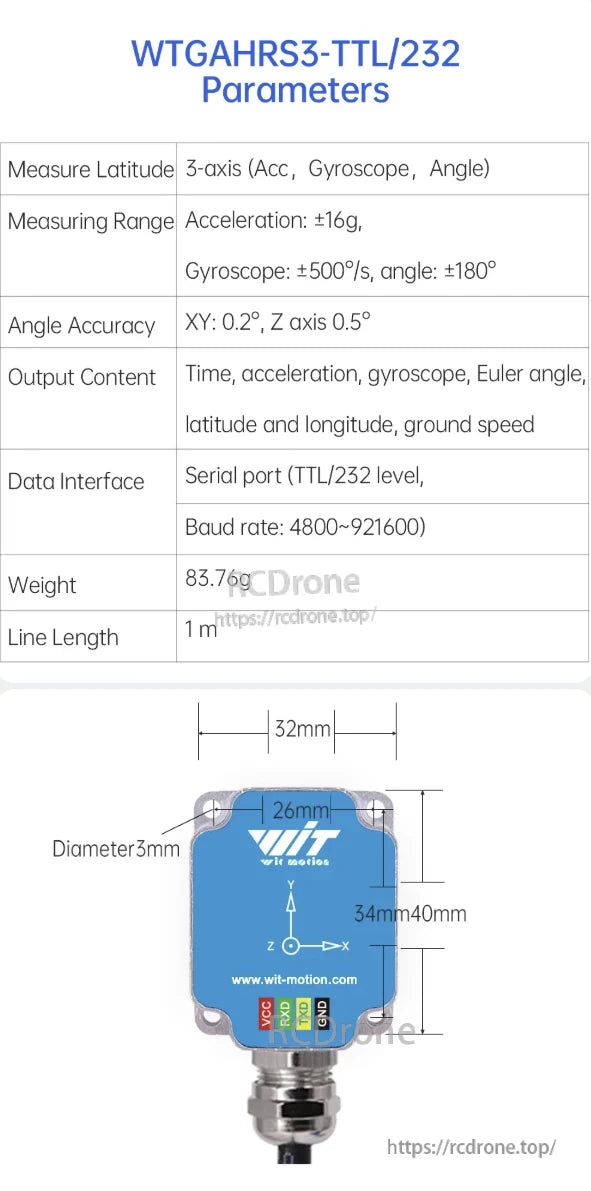
WitMotion WTGAHRS3-TTL/232 sensore AHRS offre misurazioni su 3 assi con accelerazione di ±16g, giroscopio di ±500°/s, intervallo angolare di ±180°. Fornisce tempo, accelerazione, giroscopio, angoli di Eulero, latitudine, longitudine, velocità di terra tramite TTL/232. Pesa 83,76g, dimensioni 40×34×26mm, lunghezza del cavo 1m.

I sensori WitMotion WTGAHRS3-485 e WTGAHRS3-GPS presentano un'ampia gamma di tensione in ingresso, un basso consumo energetico e un posizionamento GPS/BD ad alta precisione. Supportano più sistemi satellitari, un rapido TTFF e i protocolli RS485/MODBUS/NMEA0183 per prestazioni affidabili in temperature estreme.

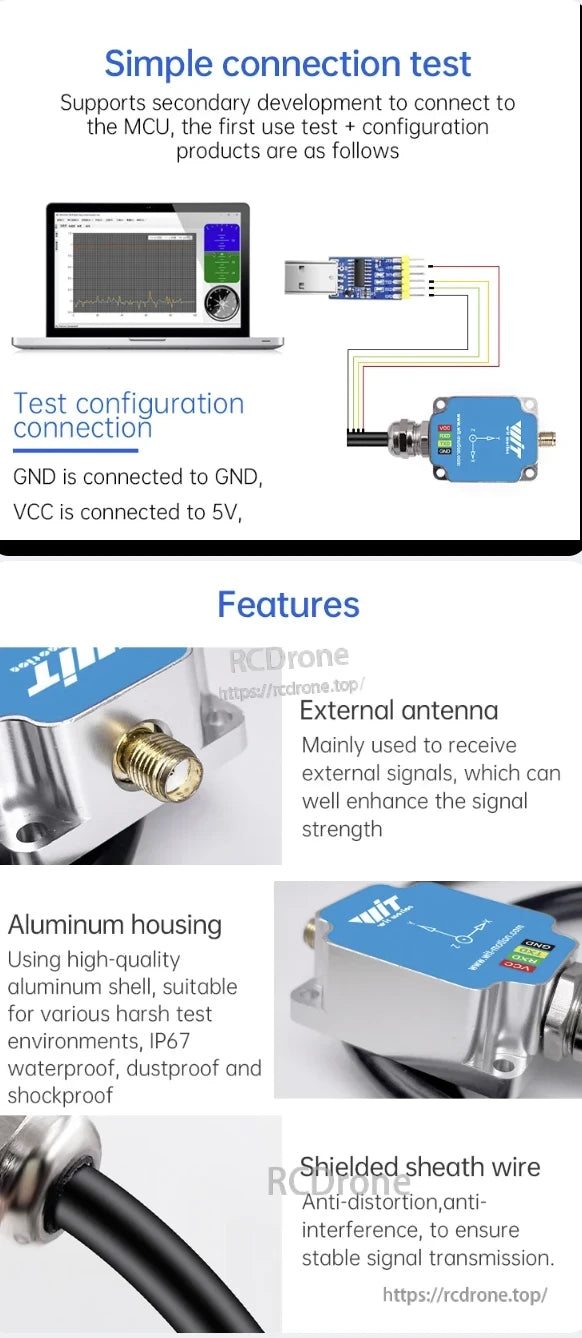
Il sensore AHRS WitMotion WTGAHRS3 è dotato di un'antenna esterna, di un alloggiamento in alluminio con protezione IP67, di un cavo schermato e supporta la connessione MCU per un facile testing.
Related Collections





