








Modulo GPS GNSS RTK WitMotion WTRTK-M ZED-F9P, posizionamento differenziale al centimetro per UAV/Auto, GPS/GLONASS/Galileo/BeiDou, UART TTL, NMEA/UBX/RTCM
Modulo GPS GNSS RTK WitMotion WTRTK-M ZED-F9P, posizionamento differenziale al centimetro per UAV/Auto, GPS/GLONASS/Galileo/BeiDou, UART TTL, NMEA/UBX/RTCM
WitMotion
Impossibile caricare la disponibilità di ritiro
Overview
WTRTK-M è un modulo di posizionamento differenziale RTK ad alta precisione basato sul motore GNSS u-blox ZED-F9P. Traccia GPS, GLONASS, Galileo, BeiDou e QZSS contemporaneamente e fornisce un'accuratezza a livello di centimetro dopo la correzione RTK. Il modulo offre una ricezione dual-frequency, un'uscita in tempo reale a 5 Hz per applicazioni di mappatura/autonome, e uno strumento PC per la configurazione con un tasto delle stazioni mobili/base e la visualizzazione dei percorsi. Tecnologie di anti-interferenza e calibrazione migliorano la stabilità e la sicurezza dei dati.
Caratteristiche principali
-
RTK a livello di centimetro: flusso di lavoro mobile/base con rapida convergenza.
-
Multi-costellazione, dual-frequency: GPS L1/L2; GLONASS G1/G2; BeiDou B1/B2; Galileo E1/E5b; QZSS L1/L2.
-
Alta sensibilità &e avvio rapido: 184 canali; avvio a freddo 24 s, avvio a caldo 2 s, riacquisizione 2 s; convergenza ≤10 s.
-
Prestazioni di tempo/rotta: 1PPS RMS 30 ns (99% 60 ns); precisione della rotta 0.4° (dinamica 0.3°).
-
Protocolli ricchi: NMEA, UBX, RTCM 3.3; fase portante (RAWX) supportata.
-
Frequenza configurabile &e 1 PPS: aggiornamento 0.25–20 Hz (predefinito 1 Hz); secondo impulso 0.25 Hz–10 MHz (periodo predefinito 1 s, livello alto ~100 ns).
-
Dual UART (TTL) e opzioni antenna SMA-K / IPEX; software per PC per visualizzare percorsi e configurazione del dispositivo.
-
Scene applicative: rilevamento/mappatura UAV, trattori autonomi/AGV, navigazione veicolare ad alta precisione, robotica.
Come funziona l'RTK (breve)
Una stazione base fissa calcola l'errore di misurazione dei satelliti rispetto alla sua posizione nota e trasmette dati differenziali RTCM. La stazione mobile applica queste correzioni per ottenere un posizionamento in tempo reale a livello di centimetro.
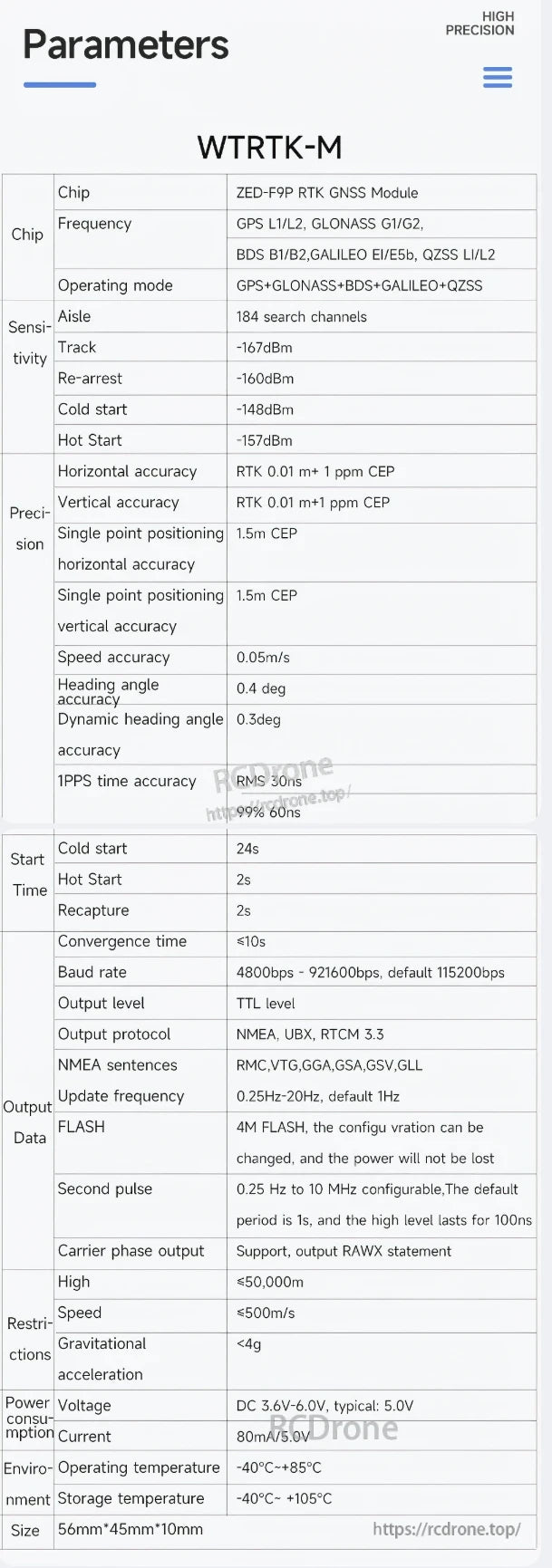
Specifiche principali
| Articolo | Spec |
|---|---|
| Chip GNSS | Modulo GNSS RTK ZED-F9P |
| Costellazioni/Bande | GPS L1/L2, GLONASS G1/G2, BeiDou B1/B2, Galileo E1/E5b, QZSS L1/L2 |
| Canali | 184 canali di ricerca |
| Sensibilità | Tracking -167 dBm; riacquisizione -160 dBm; avvio a freddo -148 dBm; avvio a caldo -157 dBm |
| Precisione RTK (CEP) | Orizzontale/Verticale: 0.01 m + 1 ppm CEP |
| Precisione a punto singolo (CEP) | Orizzontale 1.5 m, Verticale 1.5 m |
| Precisione della velocità | 0,05 m/s |
| Precisione dell'orientamento | 0,4° (dinamico 0,3°) |
| Precisione del tempo 1PPS | RMS 30 ns, 99% 60 ns |
| Avvio/Ricattura | Freddo 24 s, Caldo 2 s, Ricattura 2 s; Convergenza ≤10 s |
| Velocità di trasmissione | 4 800–921 600 bps (predefinito 115 200 bps) |
| Livello elettrico | TTL |
| Protocolli | NMEA, UBX, RTCM 3.3; Frasi NMEA: RMC/VTG/GGA/GSA/GSV/GLL |
| Frequenza di aggiornamento | 0.25–20 Hz (predefinito 1 Hz); nota: tassi molto elevati aumentano il carico seriale—mantenere ≤ 5 Hz per affidabilità |
| Flash a bordo | 4 MB, mantiene la configurazione dopo lo spegnimento |
| Fase portante | Uscita RAWX supportata |
| Restrizioni | Altitudine ≤ 50 000 m; Velocità ≤ 500 m/s; Accelerazione < 4 g |
| Alimentazione | DC 3.6–6.0 V (tipico 5.0 V), ≈ 80 mA @ 5 V |
| Operativo / Stoccaggio | -40 °C a +85 °C / -40 °C a +105 °C |
| Dimensioni | 56 × 45 × 10 mm (marche del diagramma frontale ~46 mm altezza) |
Interfacce &e Indicatori
Antenna: SMA-K (con opzione IPEX).
Porte UART (TTL, 4-pin ciascuna):
-
P1 (destra) – VI (3.6–6.0 V, 5 V rec.), G (GND), T1 (TX), R1 (RX).
-
P2 (sinistra) – VO (3.6–6.0 V, 5 V rec.), G (GND), T2 (TX), R2 (RX).
P2 è utilizzato per input/output RTCM; P1 fornisce dati NMEA. P1/P2 VCC sono collegati internamente: alimentazione da entrambi.
LED
-
PWR: Rosso acceso = alimentazione applicata.
-
TX1/TX2: Verde lampeggiante = la porta ha dati in uscita.
-
PPS: Spento prima del fix; blu lampeggiante dopo posizionamento 3D.
-
RTK: Spento quando non in RTK; blu lampeggiante in RTK Float; acceso in RTK Fixed.
Connessione & Software
-
Configurazione cablata: collegare l'antenna a SMA; collegare UART1 al PC per visualizzare i dati di posizione.
-
Base/Mobile: imposta un modulo come base (emette RTCM); il mobile consuma RTCM per ottenere RTK—il mobile può essere utilizzato direttamente come rover RTK dopo aver ricevuto le correzioni.
-
Software per PC: visualizzazione tracciamento, visualizzazione dati e configurazione base/rover con un tasto.
Note
-
La baud predefinita è 115 200 bps. Se aumenti la frequenza di uscita, aumenta la baud di conseguenza per evitare overflow (frequenza massima pratica ≤ 5 Hz su collegamenti standard).
-
Sviluppo personalizzato supportato.
Dettagli
Modulo GPS di posizionamento differenziale ad alta precisione con accuratezza a livello di centimetro. Supporta GPS, GLONASS, Galileo, BeiDou.Ricevitore multi-banda, tecnologia RTK, PPS, TX1, TX2, USR, RTK, indicatori PWR.
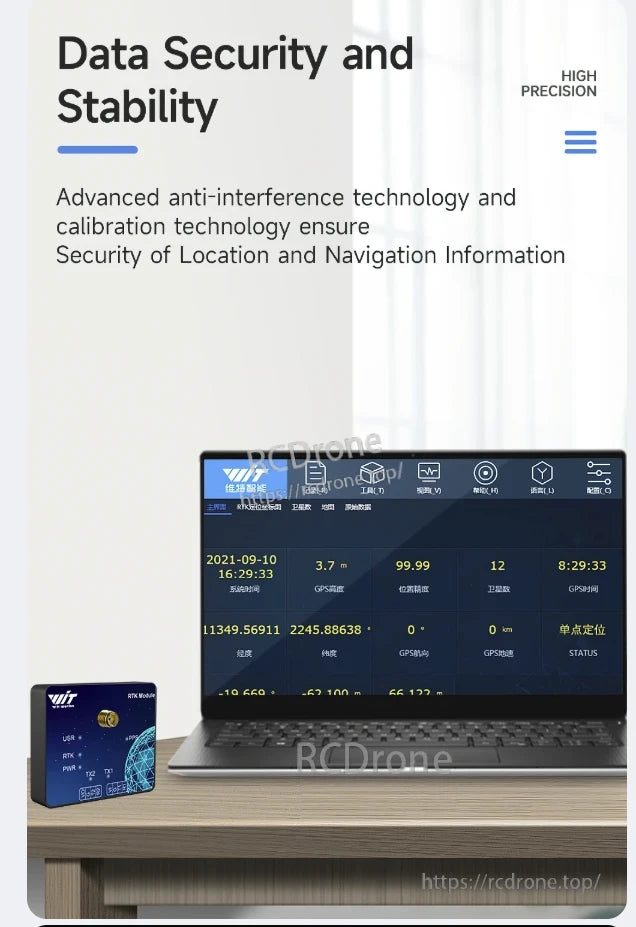
WitMotion WTRTK-M ZED-F9P RTK GNSS GPS garantisce alta precisione, sicurezza dei dati e stabilità con tecnologia avanzata di anti-interferenza e calibrazione per informazioni di posizione e navigazione affidabili.
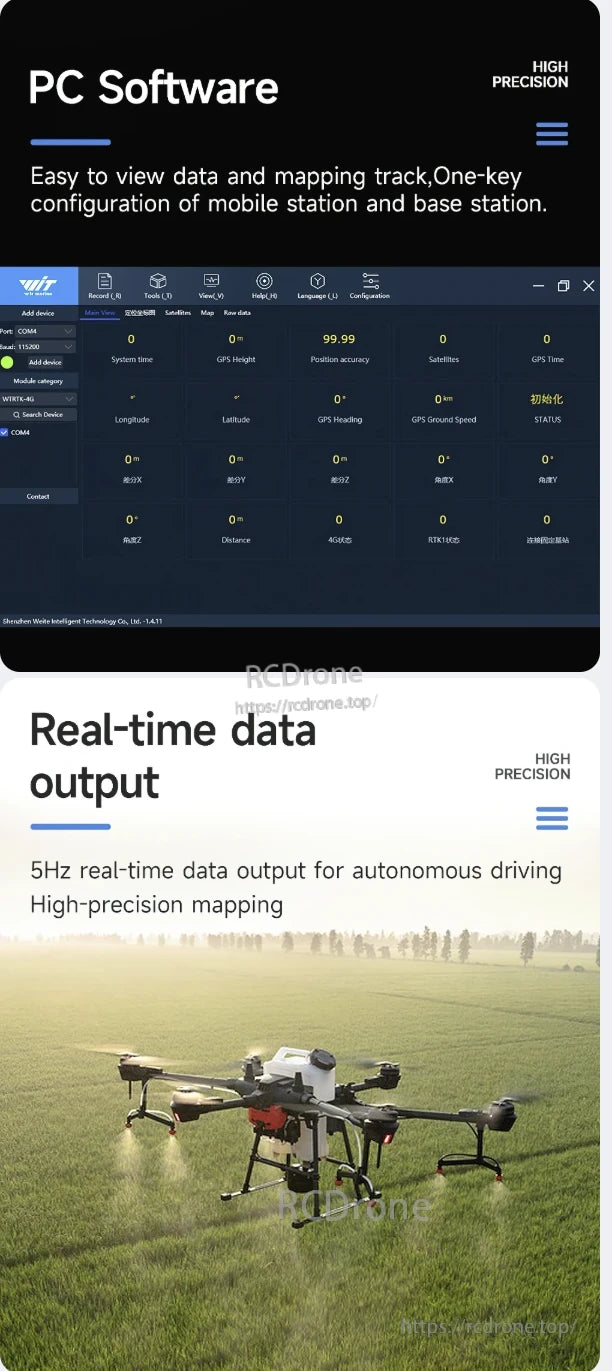
Software GPS GNSS RTK ad alta precisione con output dati in tempo reale a 5Hz per guida autonoma e mappatura. Supporta configurazione con un tasto, tracciamento satellitare, posizionamento accurato e telemetria dettagliata.
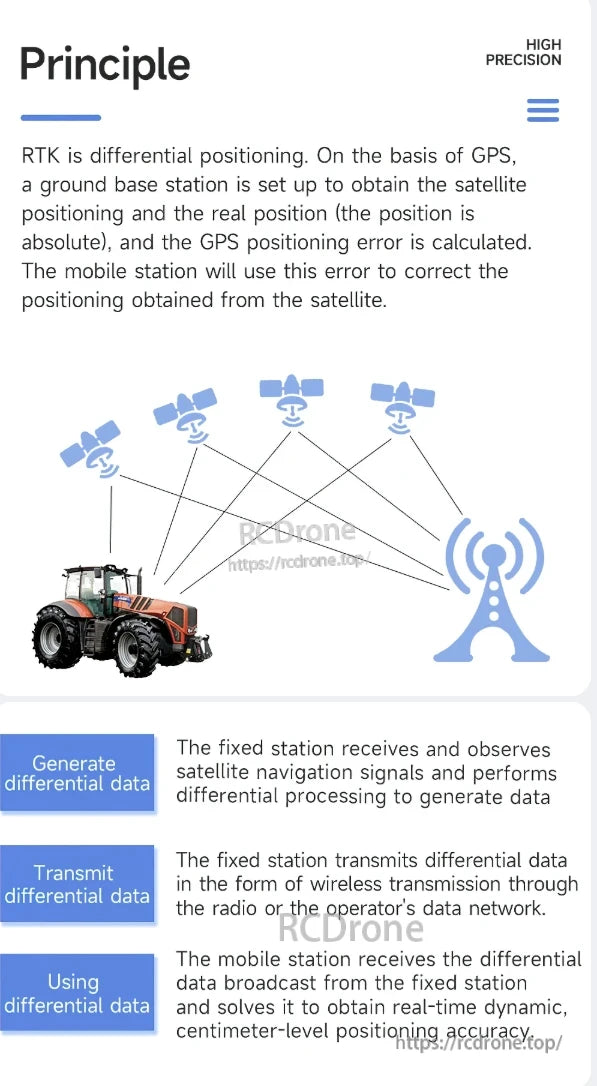
RTK utilizza il posizionamento differenziale con GPS. Una stazione fissa calcola gli errori di posizionamento dei satelliti e trasmette correzioni senza fili a una stazione mobile, consentendo un'accuratezza in tempo reale a livello di centimetro per una navigazione precisa.
WTRTK-M presenta il modulo GNSS RTK ZED-F9P con supporto multi-costellazione, alta precisione (0.01m), tempi di avvio rapidi, più protocolli e funziona da -40°C a +85°C.


Schema di connessione cablata per il modulo WitMotion RTK: configurazioni stazione base/mobile, antenne SMA, connessioni UART1 PC. Include software, manuale, video e risorse sui protocolli.
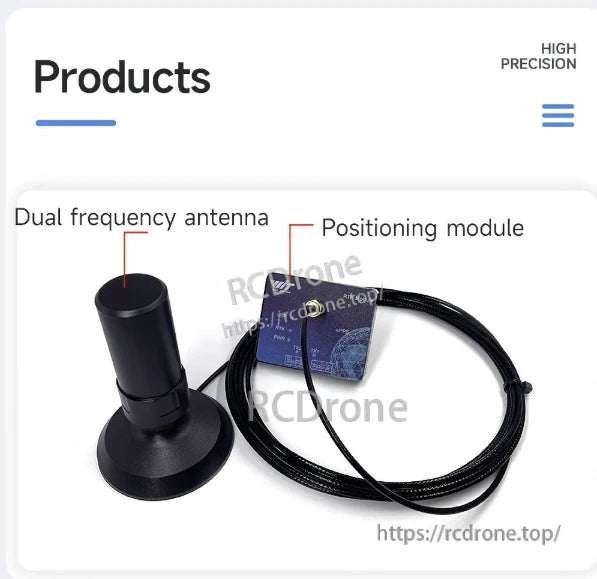
Antena a doppia frequenza e modulo di posizionamento per GNSS GPS ad alta precisione
Related Collections








