












Kit Robot a Due Ruote Rider-Pi Raspberry Pi CM5 con Display IPS da 2,0", Fotocamera 5MP, IMU
Kit Robot a Due Ruote Rider-Pi Raspberry Pi CM5 con Display IPS da 2,0", Fotocamera 5MP, IMU
Yahboom
Impossibile caricare la disponibilità di ritiro
Panoramica
Rider-Pi è un robot desktop a due ruote progettato per sviluppatori, educatori e appassionati di robotica. È basato sul modulo core Raspberry Pi CM5 e utilizza la programmazione Python. Con un'unità di misura inerziale (IMU) integrata e una struttura a biella in fibra di carbonio, il robot può regolare gli angoli delle articolazioni in tempo reale per adattarsi a diversi ostacoli del terreno. Uno schermo IPS da 2,0 pollici sul davanti può visualizzare immagini video e 35 espressioni dinamiche in tempo reale.
Caratteristiche principali
- Modulo core Raspberry Pi CM5 + sviluppo Python: Progettato per un supporto di sviluppo più ampio.
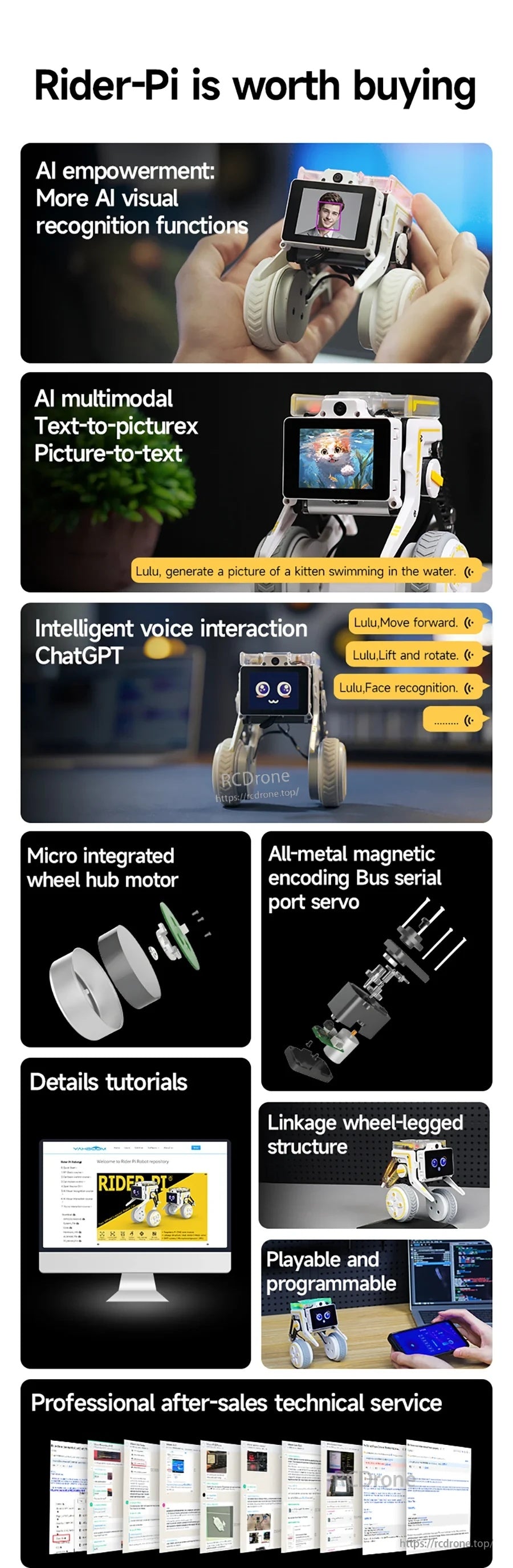
- Struttura a collegamento ruote-gambe: Combina la mobilità su ruote con la capacità di superare ostacoli con le gambe; supporta il movimento avanti/indietro e la rotazione a 360°.
- Stabilizzazione della postura IMU: Regola la postura del robot in tempo reale per adattarsi a vari ostacoli del terreno.
- 2.Display a colori IPS da 0 pollici: Supporta la visualizzazione video, 35 espressioni dinamiche e espressioni dinamiche personalizzate.
- Hardware di visione + interazione: Fotocamera HD integrata da 5MP, microfono digitale (descritto anche come doppi microfoni digitali MEMS), altoparlante/i e quattro pulsanti programmabili.
- Esempi di interazione & con riconoscimento visivo AI: Rilevamento del viso, tracciamento del viso, riconoscimento delle emozioni (versione CM5), riconoscimento di oggetti 3D, rilevamento di bersagli, rilevamento di oggetti, riconoscimento delle targhe, tracciamento/seguimento del colore, seguimento/controllo dei gesti, controllo del movimento tramite codice QR, riconoscimento dello scheletro umano, controllo del palmo, maschera facciale e pennello (disegno con le dita sullo schermo).
- Programma GUI preinstallato: Include oltre 30 funzioni per sperimentare rapidamente le caratteristiche principali.
- Metodi di controllo remoto: App Bluetooth e WiFi (Android/iOS) sono fornite gratuitamente.
- Supporto ChatGPT (costo aggiuntivo): Abilita funzioni di Q &A vocale, controllo vocale, testo-immagine e descrizione analisi immagine.
- Componenti di attuazione mostrati: Motore del mozzo ruota integrato micro; servo porta seriale bus di codifica magnetica interamente in metallo.
Specifiche
| Prodotto | Robot a due ruote-gambe Rider-Pi |
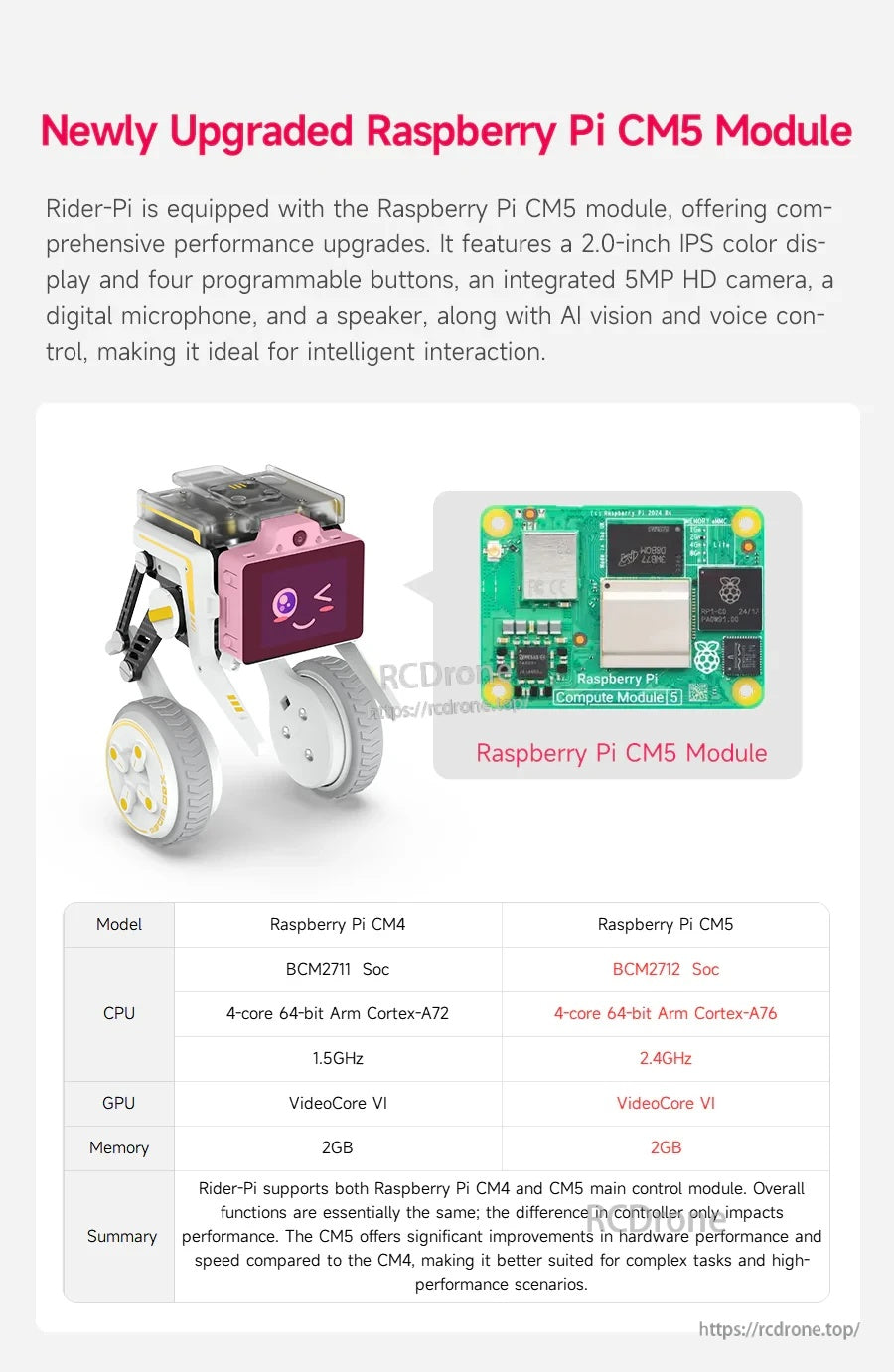
| Controllo principale | Modulo core Raspberry Pi CM5 (indicato anche per supportare Raspberry Pi CM4 e CM5) |
| Programmazione | Python |
| Display | 2.Display a colori IPS da 0 pollici |
| Espressioni | 35 espressioni dinamiche; supporta espressioni dinamiche personalizzate |
| Fotocamera | Fotocamera HD integrata da 5MP |
| Audio | Microfono digitale (anche descritto come microfoni digitali MEMS doppi); altoparlante(i) |
| Pulsanti | Quattro pulsanti programmabili |
| Sensore | Unità di misura inerziale integrata (IMU) |
| Telecomando | Bluetooth; App WiFi (Android/iOS) |
| CM4 vs CM5 (come fornito) |
CM4: SoC BCM2711; 4-core 64-bit Arm Cortex-A72; 1.5GHz; GPU: VideoCore VI; Memoria: 2GB CM5: SoC BCM2712; 4-core 64-bit Arm Cortex-A76; 2.4GHz; GPU: VideoCore VI; Memoria: 2GB |
Applicazioni
- Apprendimento di robotica con Python e dimostrazioni in aula
- Esperimenti di visione AI: rilevamento oggetti, rilevamento/tracciamento volti, riconoscimento oggetti 3D, riconoscimento targhe, tracciamento/seguimento colori
- Dimostrazioni di interazione umana: tracciamento/controllo gesti, controllo del palmo, riconoscimento scheletro umano, interazione vocale (incluse funzionalità opzionali di ChatGPT)
- Dimostrazioni di controllo del movimento tramite codice QR
Tutorial
Il seguente video è fornito per dimostrazioni di funzioni e apprendimento:
Supporto
Per domande pre-vendita e supporto post-vendita, contattare https://rcdrone.top/ o inviare un'email a [email protected].
Dettagli

Rider-Pi abbina un modulo core Raspberry Pi CM5 con un telaio a ruote-gambe per robotica da scrivania agile e sviluppo Python.

Tutto è costruito attorno alla piattaforma CM5, con un fattore di forma compatto progettato per l'apprendimento, la prototipazione e le dimostrazioni.
Un'ampia serie di dimostrazioni e punti salienti dell'hardware supportano una rapida valutazione prima di una personalizzazione più approfondita.
La potenza di calcolo CM5, la fotocamera/audio integrata e i pulsanti programmabili si combinano per progetti di visione e controllo interattivo.
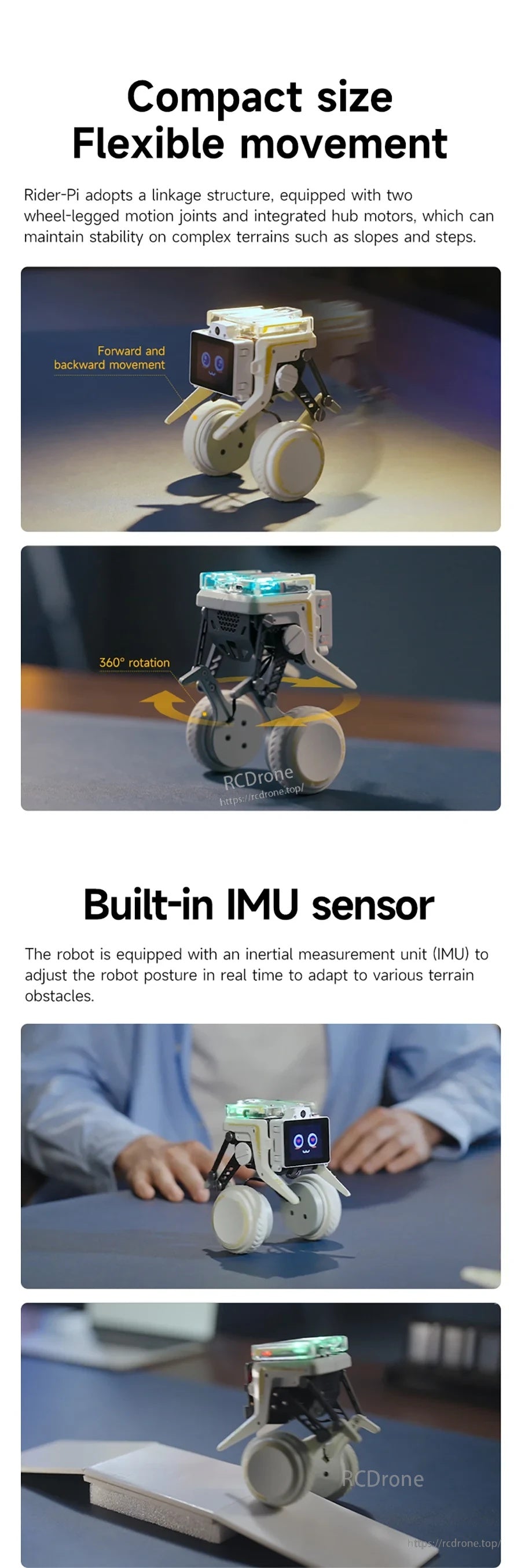
Il rilevamento della postura in tempo reale aiuta a mantenere l'equilibrio durante il movimento, la rotazione e la gestione di piccoli ostacoli.
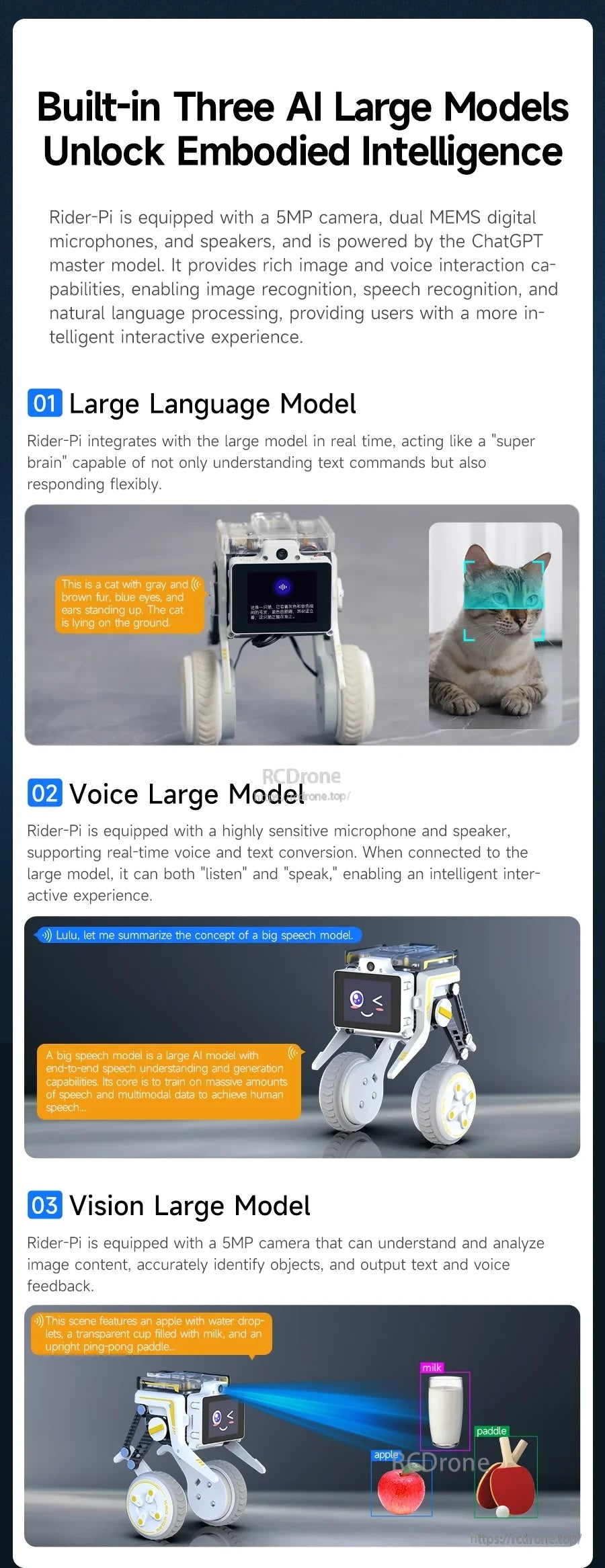
L'interazione multimodale consente domande e risposte vocali, controllo vocale e flussi di lavoro basati sulla comprensione tramite fotocamera.
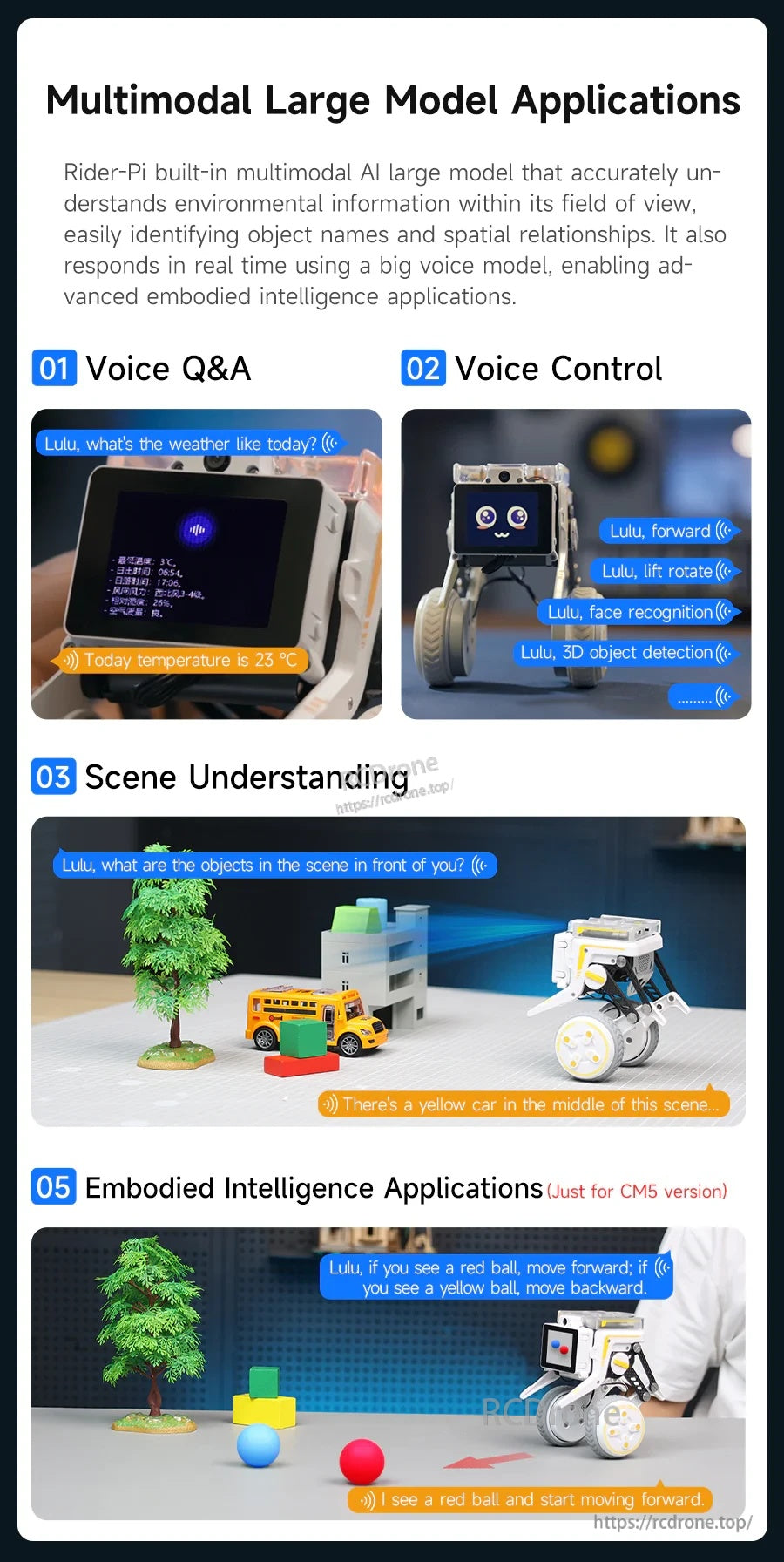
Utilizza esempi in stile app per esplorare comandi conversazionali e suggerimenti di scena in un contesto di robotica.
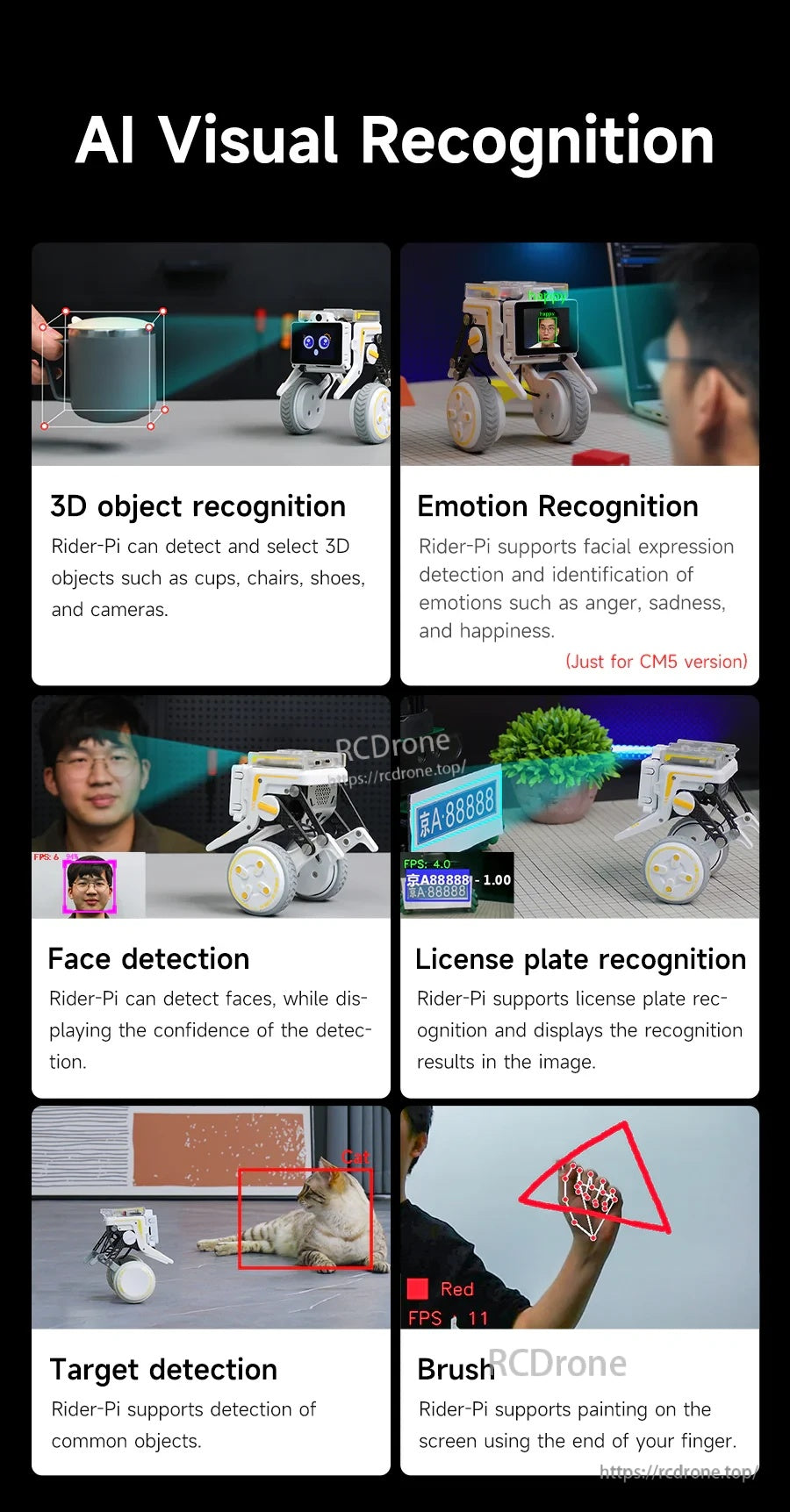
Le dimostrazioni di visione artificiale coprono compiti di rilevamento, tracciamento e riconoscimento adatti per esperimenti in aula e in laboratorio.
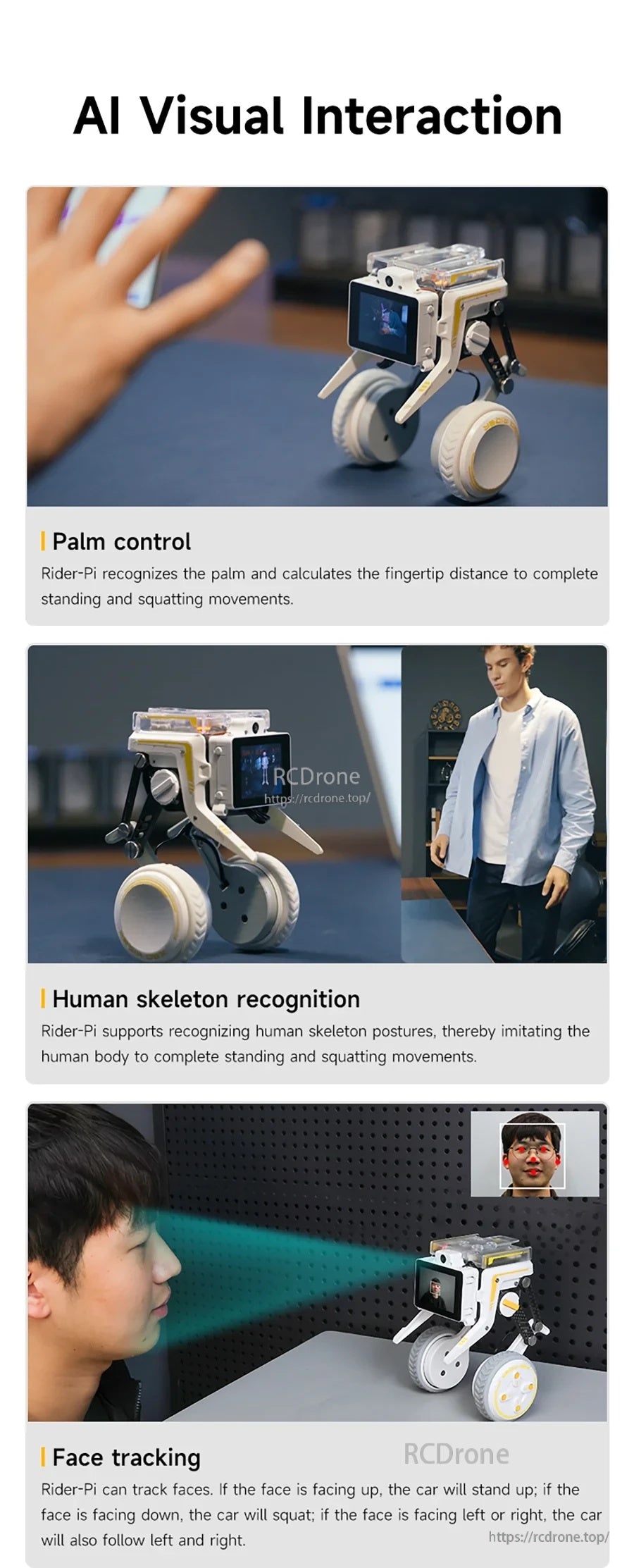
Le opzioni di interazione a mani libere includono il controllo in stile gesto e comportamenti di tracciamento per demo reattive.
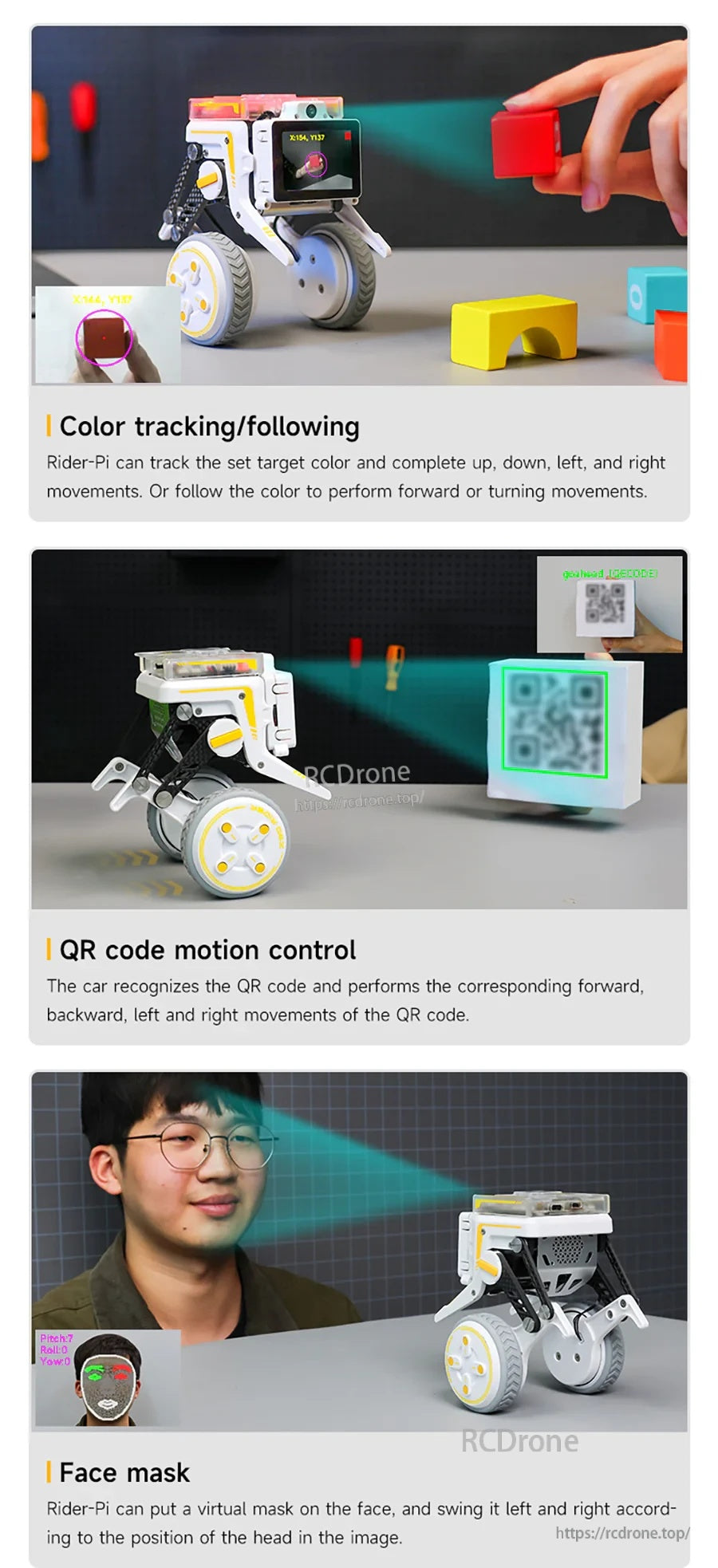
Esempi integrati aiutano a convalidare i flussi di lavoro della fotocamera come il seguito del colore e i comandi di movimento guidati da QR.

Il riconoscimento dei gesti può mappare i segnali delle mani a schemi di movimento per un controllo intuitivo senza un controller.
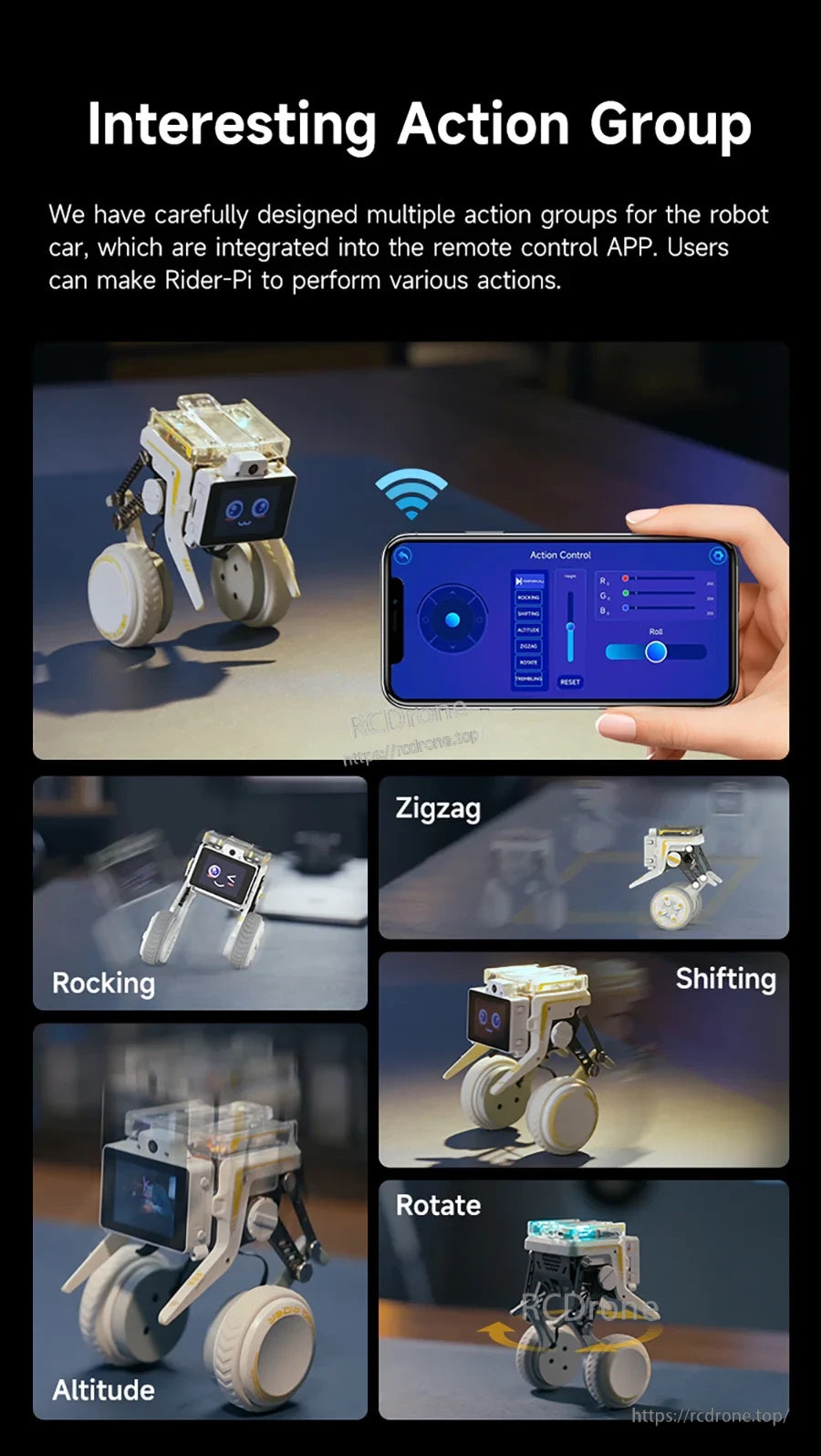
Gruppi di azioni preimpostati facilitano l'attivazione di routine di movimento raffinate dall'app mobile.

Un'interfaccia grafica preinstallata fornisce un accesso rapido a demo principali, impostazioni e modalità comuni di visione/interazione.
Tutorial passo-passo supportano l'installazione, i flussi di lavoro di programmazione e esperimenti ripetibili.
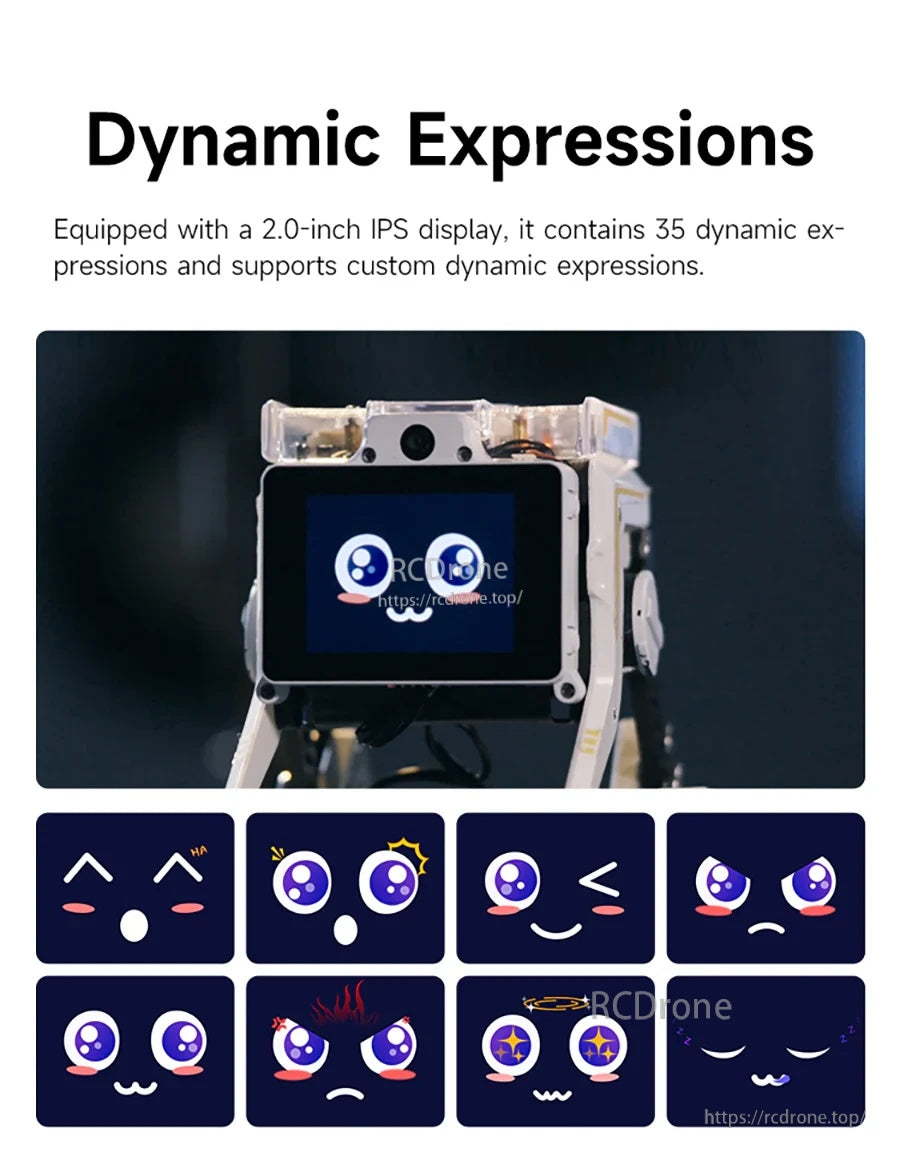
Il display IPS da 2,0 pollici supporta video in tempo reale e una libreria di volti animati espressivi.

Le utilità principali includono registrazione, effetti di illuminazione, letture di postura, monitoraggio della batteria e controlli di movimento.
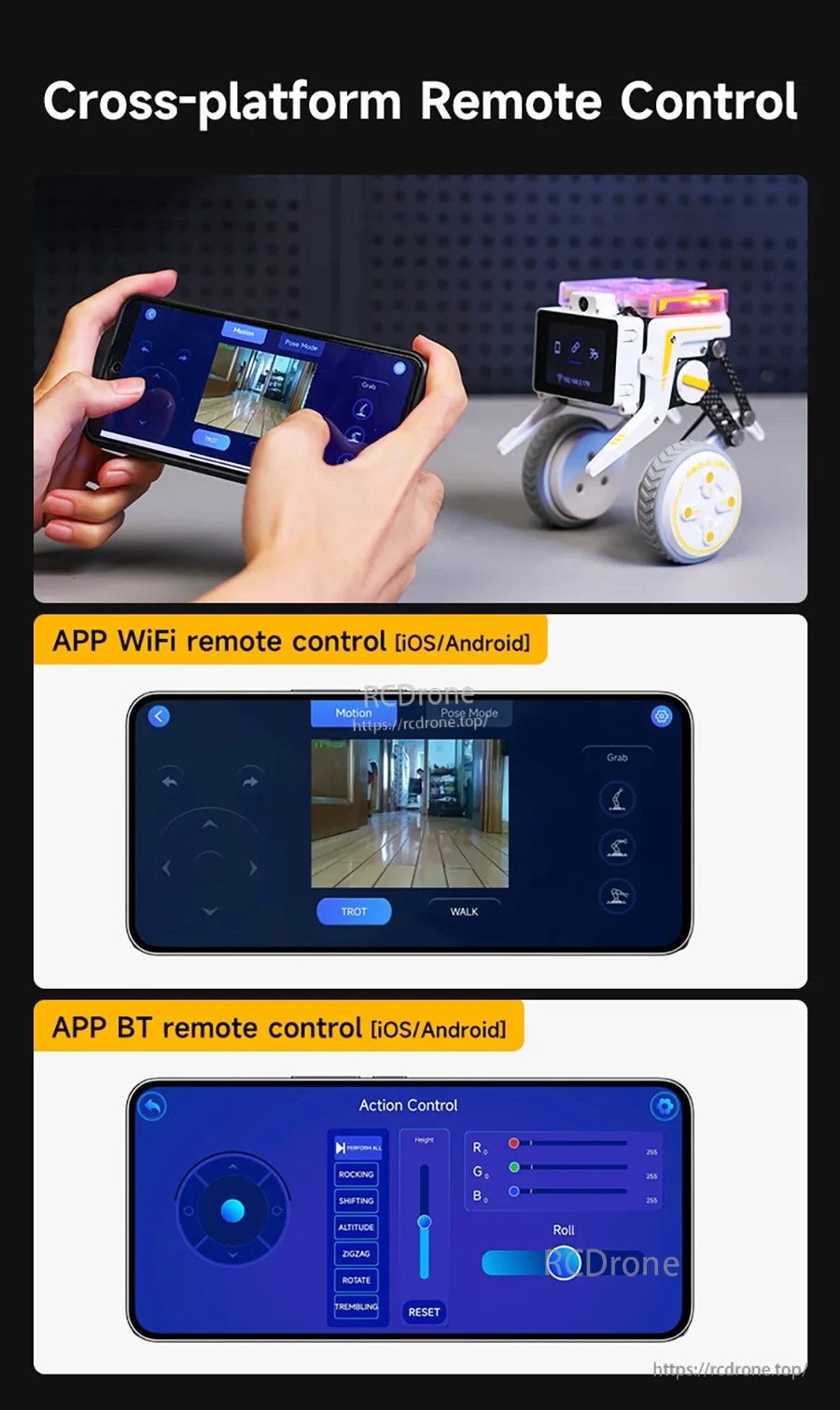
Controlla Rider-Pi da iOS o Android tramite WiFi o Bluetooth, con controlli dell'app progettati per test rapidi.
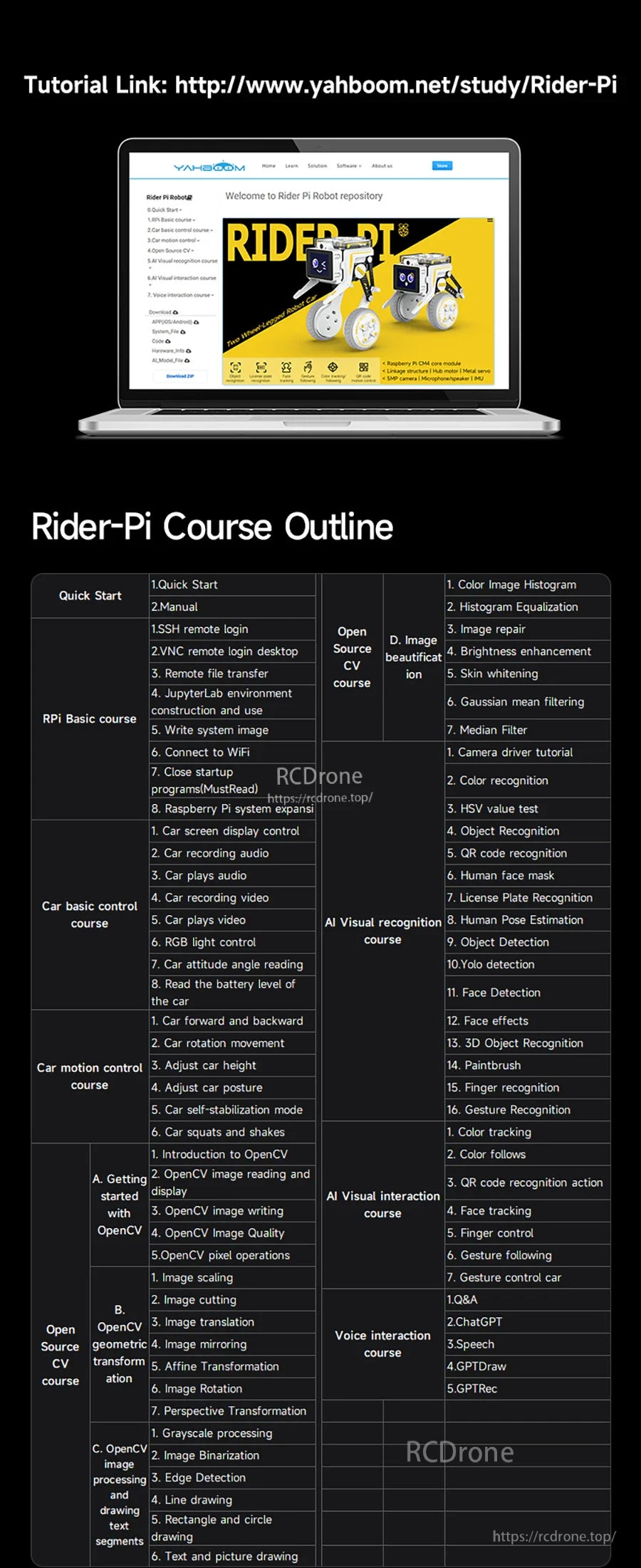
Un piano del corso strutturato aiuta a guidare l'apprendimento dalla configurazione ai progetti avanzati di visione e interazione.
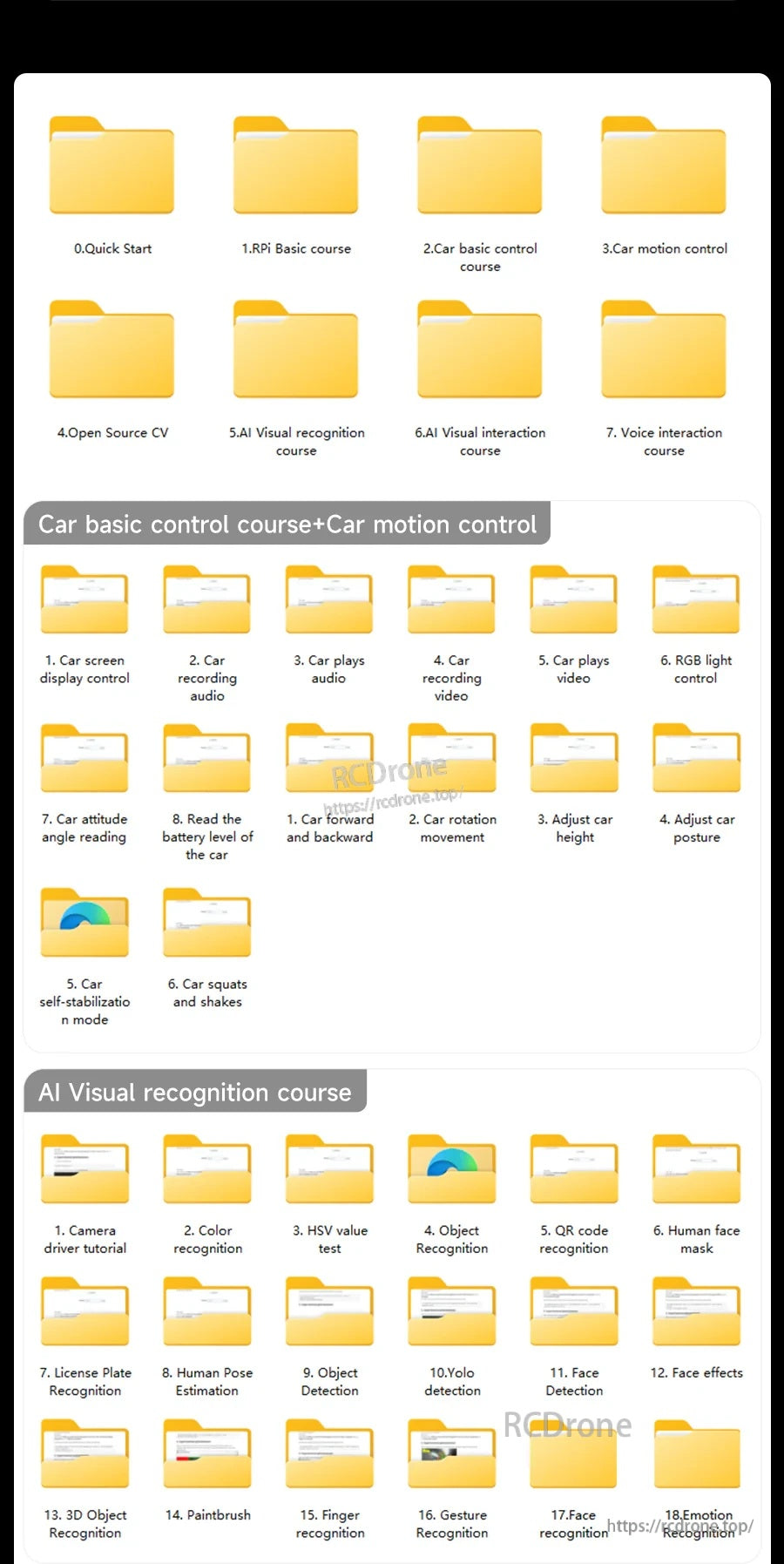
Rider-Pi include cartelle di apprendimento organizzate per Avvio Rapido, basi di Raspberry Pi, controllo dell'auto e controllo del movimento, riconoscimento visivo AI e interazione, e interazione vocale.
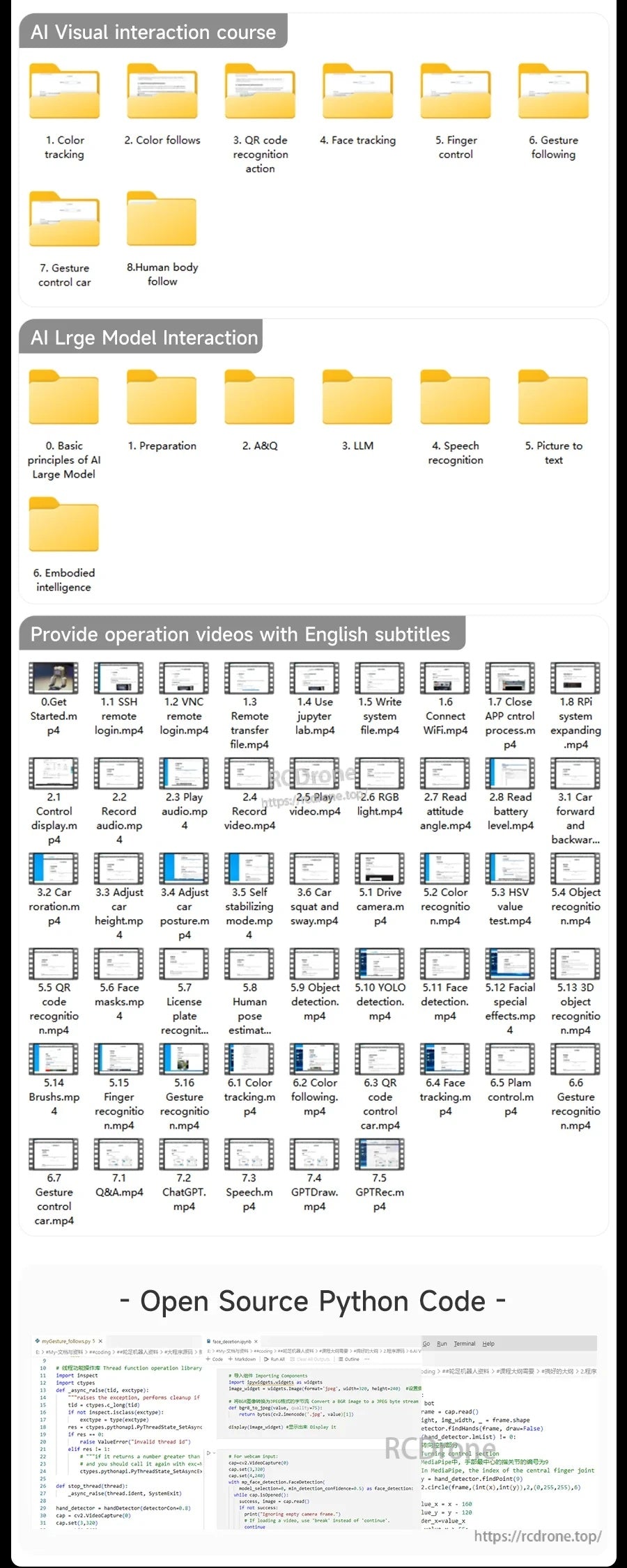
Rider-Pi include un set strutturato di lezioni di interazione AI, video operativi sottotitolati in inglese e codice Python open-source per lo sviluppo.
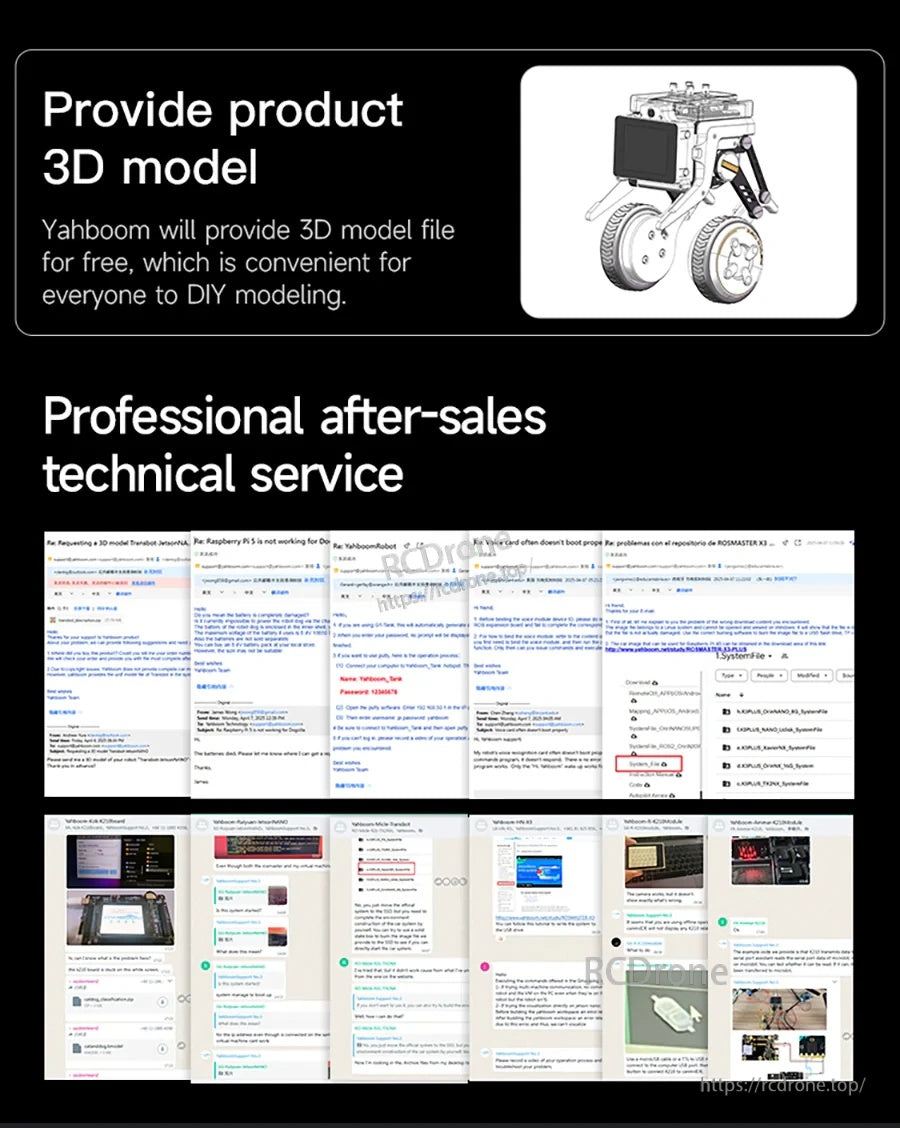
Il robot Rider-Pi è supportato da un file modello 3D fornito per la modellazione fai-da-te e un servizio tecnico post-vendita professionale.

Rider-Pi utilizza una struttura a collegamento a due ruote che combina la mobilità su ruote con un movimento di attraversamento ostacoli in stile a gambe.

Rider-Pi utilizza un corpo in ABS con accenti in fibra di carbonio, una copertura posteriore in alluminio aeronautico e punti di contatto in silicone resistente all'usura per la durata.

Il motore del mozzo integra un motore brushless, un circuito di controllo e un encoder magnetico per un controllo a 360° con una coppia di picco fino a 2 kg·cm.
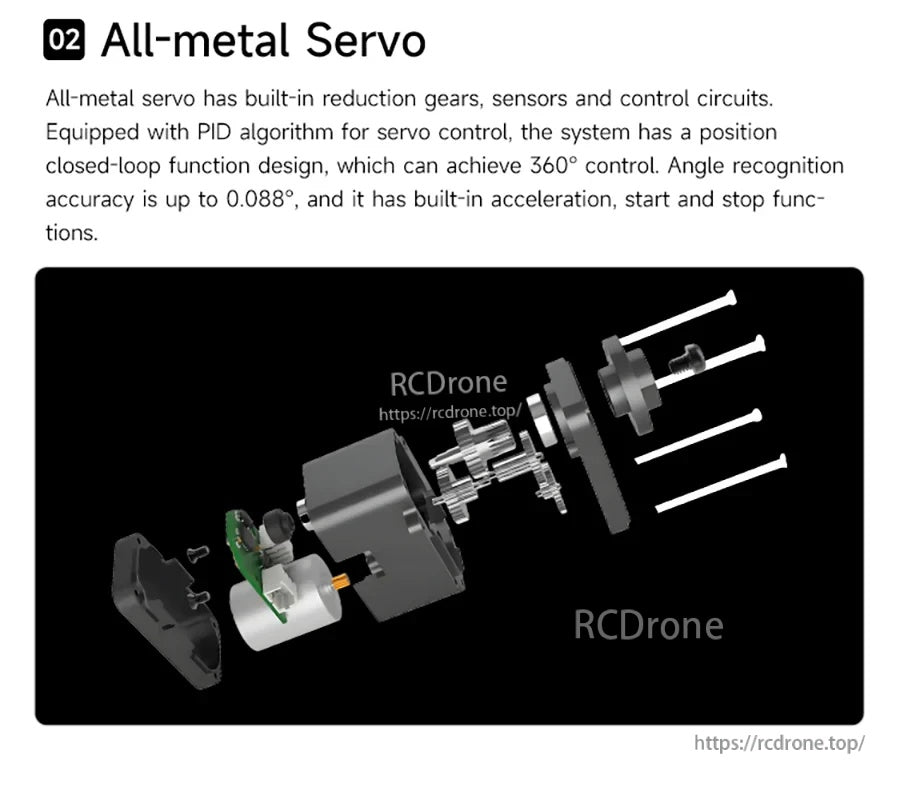
Il robot rider utilizza un design servo completamente in metallo con ingranaggi di riduzione, sensori integrati e circuiti di controllo integrati per un movimento preciso delle articolazioni.
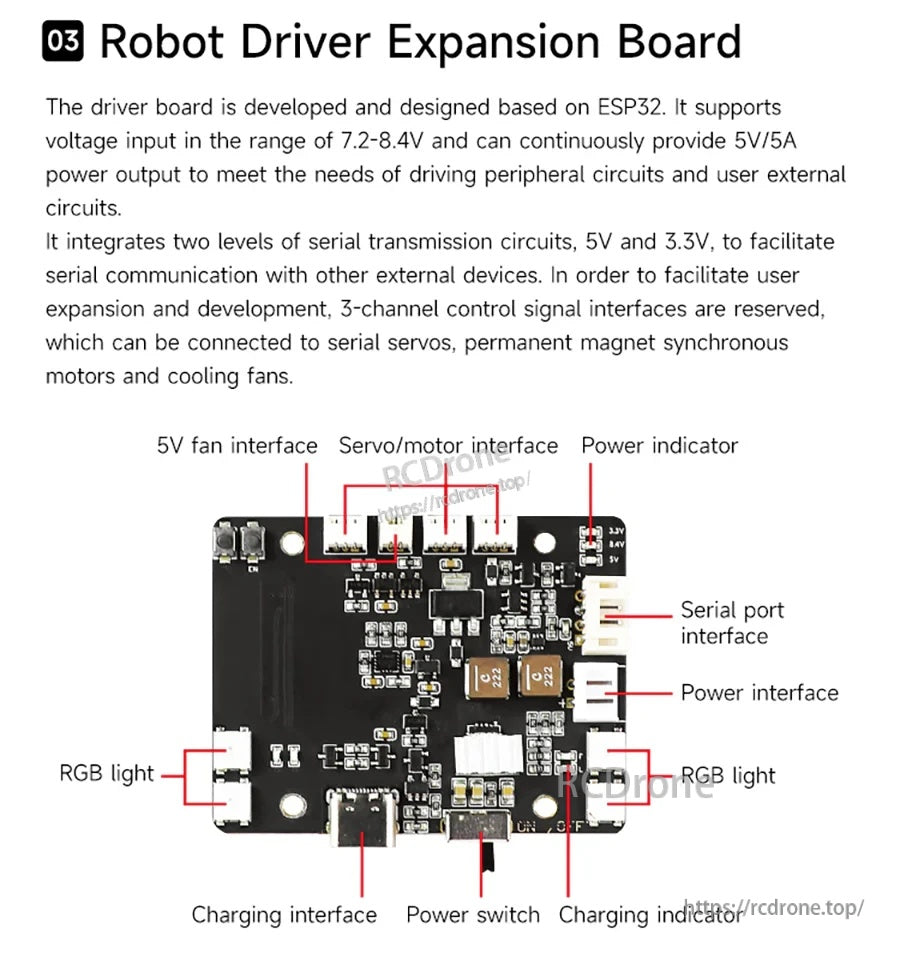
La scheda di espansione del driver del robot fornisce connettori dedicati per il controllo di servo/motore, comunicazione seriale, ingresso di alimentazione, ricarica, una ventola da 5V e illuminazione RGB.

La struttura modulare di Rider-Pi combina un modulo Raspberry Pi CM5, una fotocamera da 5MP, un display IPS da 2,0 pollici, una scheda driver per robot, servocomandi, motori del mozzo e una batteria 18500 per l'assemblaggio.
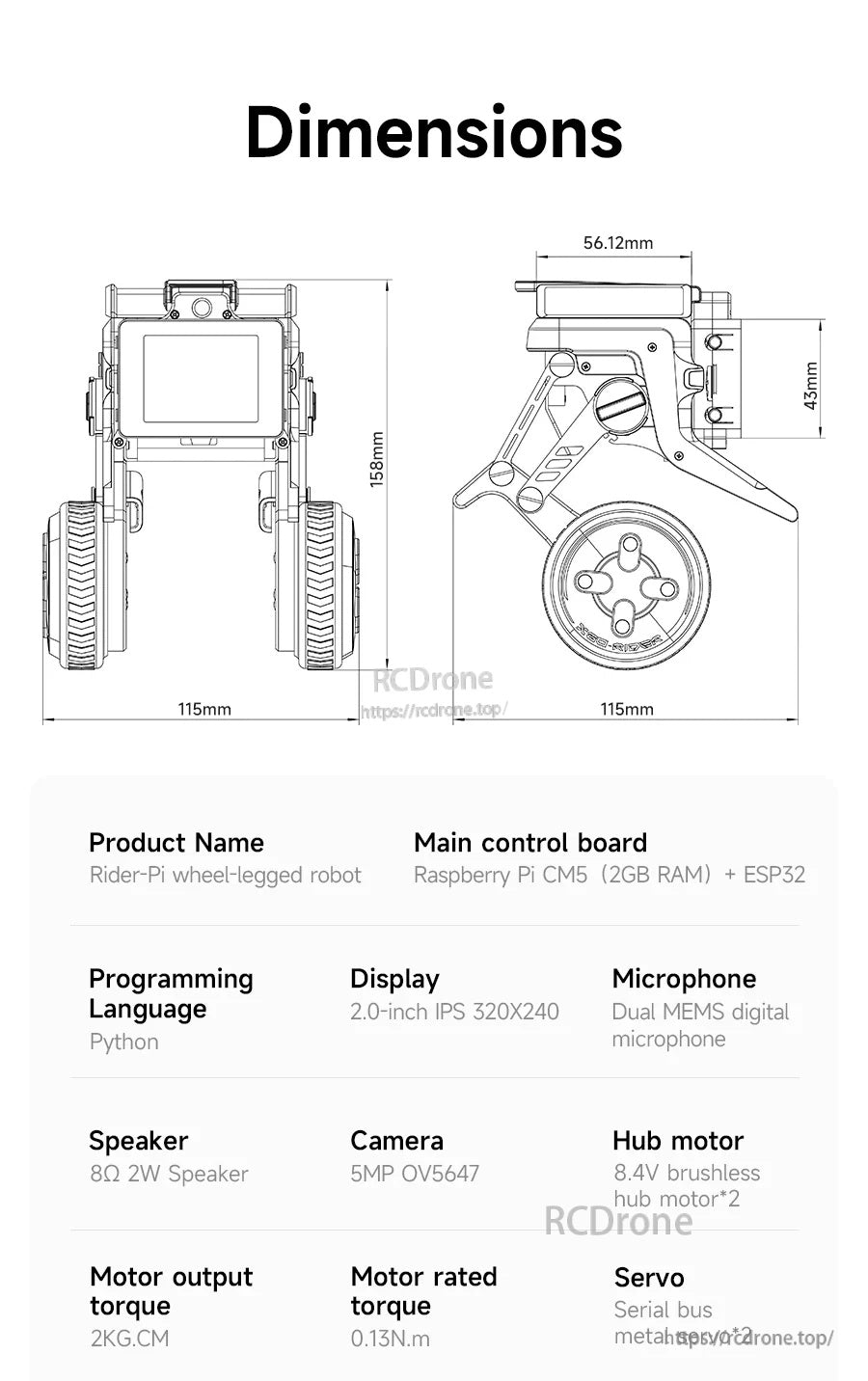
Rider-Pi utilizza un Raspberry Pi CM5 (2GB RAM) con controllo ESP32, un 2.
0-inch IPS 320×240 display, dual MEMS mic, 5MP OV5647 camera, and two 8.4V brushless hub motors.
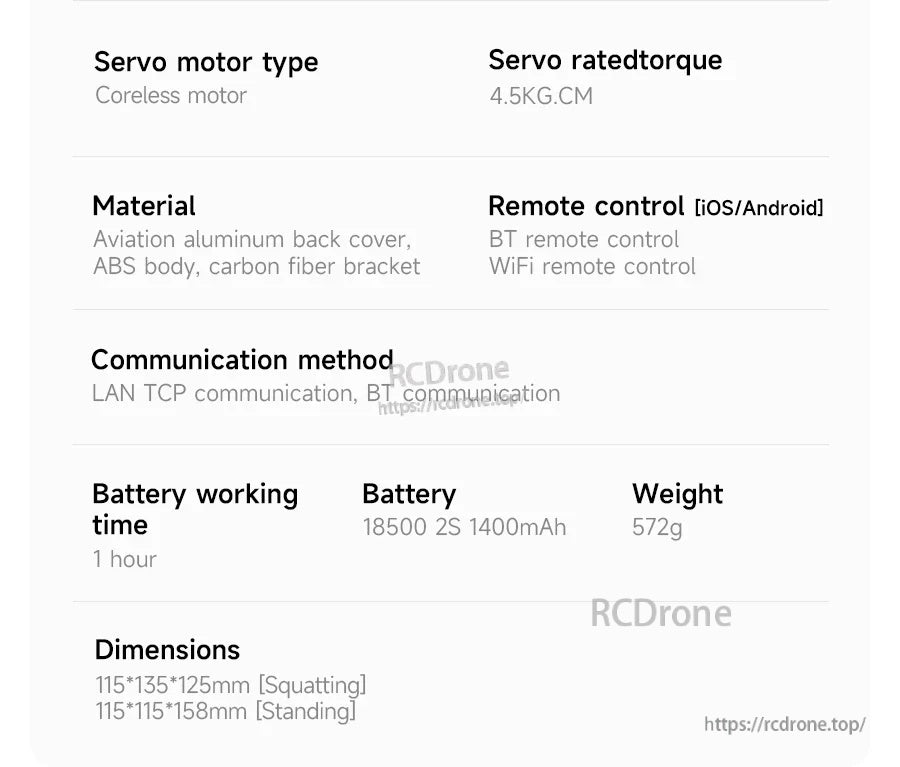
Il robot Rider-Pi CM5 utilizza un servomotore coreless (coppia di 4.5KG·CM) e include comunicazione LAN TCP/BT, peso di 572g e dimensioni di 115×135×125mm (accovacciato).
Il pacchetto del robot a ruote e gambe Rider-Pi include un robot assemblato, una scheda TF, un cavo dati USB-C, un hub USB-C e un cavo micro-to-HDMI.
Related Collections












