














Yahboom ROSMASTER A1 ROS2 Auto Robotica con Telaio Ackerman, LiDAR TOF, Telecamera PTZ, AI Vocale
Yahboom ROSMASTER A1 ROS2 Auto Robotica con Telaio Ackerman, LiDAR TOF, Telecamera PTZ, AI Vocale
Yahboom
Impossibile caricare la disponibilità di ritiro
Panoramica
ROSMASTER A1 è una piattaforma robotica ROS2 (ROS2 HUMBLE) sviluppata per l'educazione ROS e la ricerca sull'intelligenza artificiale. Adotta un telaio di movimento/sterzo Ackerman per replicare le caratteristiche di sterzata dei veicoli reali e integra l'interazione vocale con modelli AI di grandi dimensioni oltre alla percezione visiva per la mappatura e navigazione SLAM, la comprensione dell'ambiente e l'interazione multimodale (voce/visione/testo).
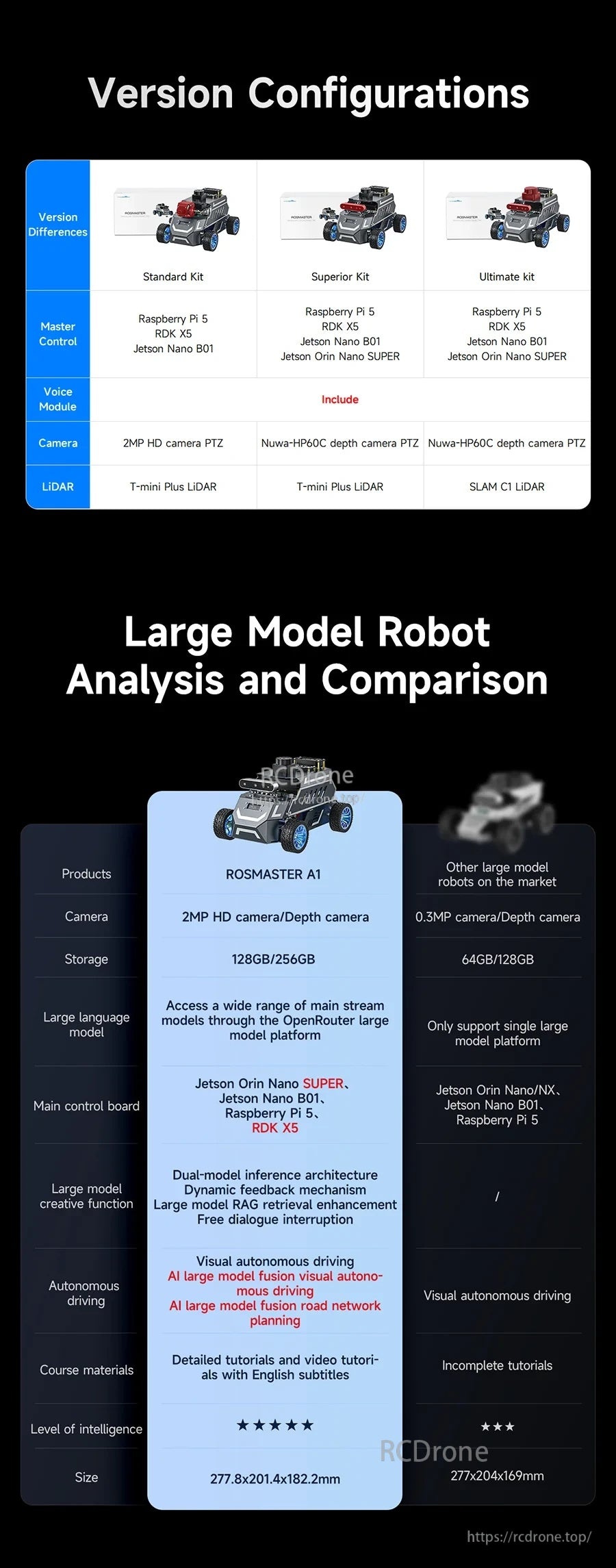
Supporta diverse opzioni di controllo principale tra cui Raspberry Pi 5 (8GB), RDK X5 (8GB), Jetson Nano B01 (4GB) e Jetson Orin Nano SUPER (8GB). Le opzioni hardware tipiche includono un modulo vocale AI di grandi dimensioni, una telecamera PTZ HD da 2MP (kit standard), una telecamera PTZ 3D di profondità (kit superiori/ultimi) e un LiDAR TOF (incluso T-mini Plus LiDAR o SLAM C1 LiDAR a seconda della versione).
Caratteristiche principali
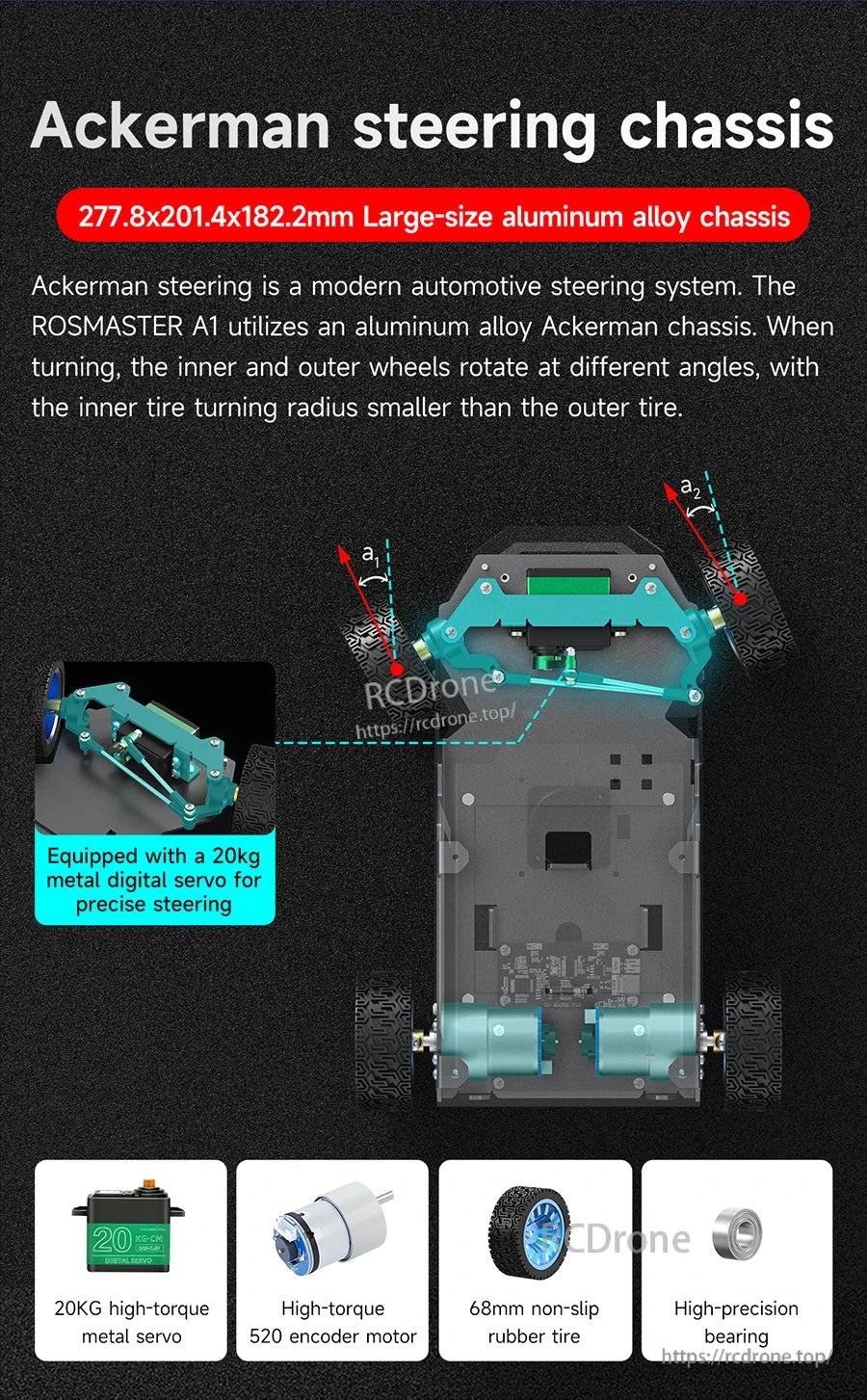
- Telaio Ackerman per movimento simile a un veicolo: telaio Ackerman in lega di alluminio; geometria di sterzata con angoli delle ruote interne/esterne differenti.
- Hardware del telaio per controllo preciso: dotato di un servo digitale in metallo da 20kg per sterzata precisa; motore encoder 520 ad alta coppia; pneumatico in gomma antiscivolo da 68mm; cuscinetto ad alta precisione.
- Capacità multimodali di grandi modelli: base di conoscenza RAG scalabile; modello linguistico visivo di grandi dimensioni; modello linguistico su larga scala; architettura di ragionamento bimodale; ragionamento con feedback dinamico.
-
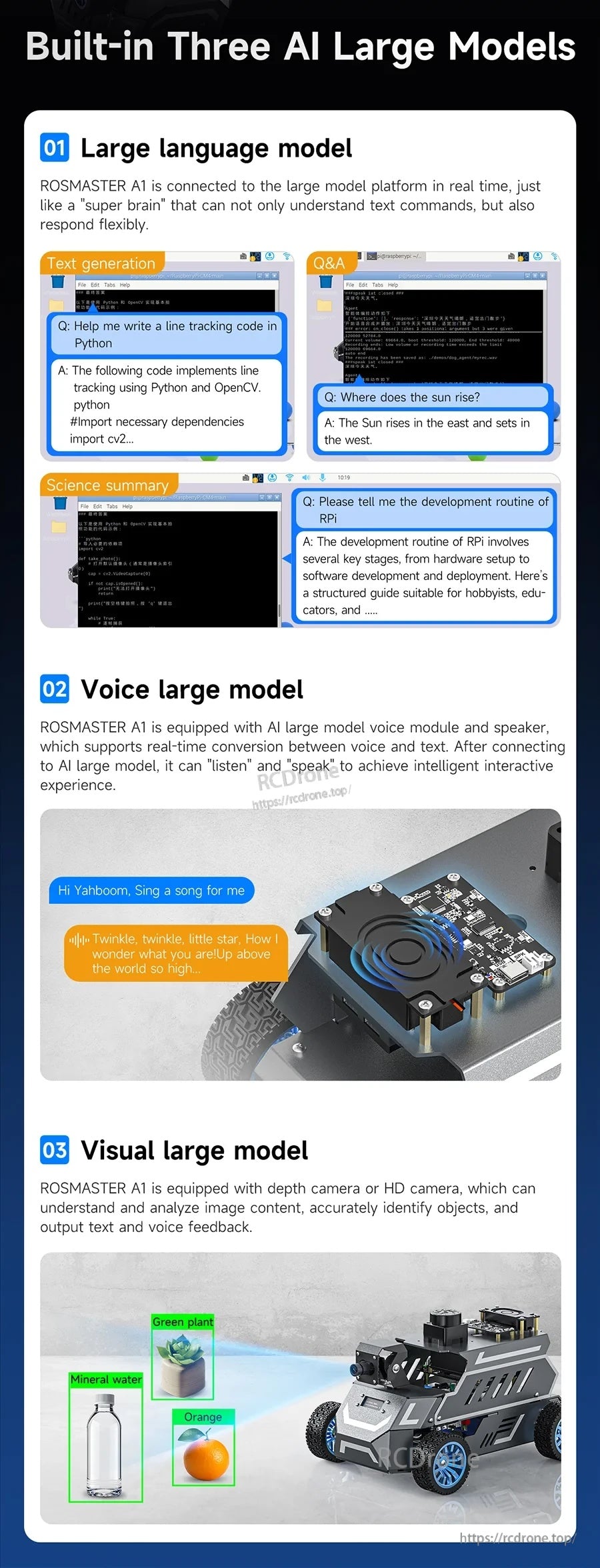
Tre modelli AI di grandi dimensioni integrati (come descritto):
- Modello linguistico di grandi dimensioni: connessione in tempo reale a una piattaforma di grandi modelli per la comprensione dei comandi testuali e risposte flessibili.
- Modello vocale di grandi dimensioni: modulo vocale AI di grandi dimensioni e altoparlante che supportano la conversione in tempo reale tra voce e testo (“ascolta” e “parla”).
- Modello visivo di grandi dimensioni: telecamera di profondità o telecamera HD per la comprensione delle immagini, identificazione degli oggetti e output di feedback testuale/vocale.
- Visione 3D di profondità (opzionale): distanza di profondità; misurazione del volume; riconoscimento della nuvola di punti 3D; mappatura 3D del mondo reale; rilevamento dei bordi in profondità.
- Funzioni TOF LiDAR: pianificazione della rete stradale; mappatura e navigazione; pianificazione del percorso; evitamento dinamico degli ostacoli; navigazione multi-punto; percezione omnidirezionale a 360°.
- Ecosistema di sviluppo ROS2: compatibile con Gazebo e RViz; supporta le funzioni di mappatura e navigazione SLAM, evitamento degli ostacoli, tracciamento e riconoscimento visivo.
- Stack software di visione AI (come elencato): Mediapipe, OpenCV, YOLOv11.
Specifiche
| Prodotto | ROSMASTER A1 |
| Piattaforma | Piattaforma per auto Ackerman modello AI / piattaforma per robot ROS2 |
| Dimensioni del telaio | 277.8 x 201.4 x 182.2 mm |
| Materiale del telaio | Lega di alluminio (corpo in lega di alluminio / telaio in lega di alluminio di grandi dimensioni) |
| Sterzo | Telaio sterzante Ackerman; servo digitale metallico da 20kg (servo metallico ad alta coppia da 20KG) |
| Motore di trasmissione | Motore encoder 520 ad alta coppia |
| Pneumatici | Pneumatico in gomma antiscivolo da 68mm |
| Cuscinetti | Cuscinetto ad alta precisione |
| Pacco batteria | Pacco batteria da 6000mAh |
| Controllo del robot | Scheda di controllo robot ROS / Scheda di espansione robot ROS (formulazione mostrata: scheda di controllo robot ROS; scheda di espansione robot multifunzione ROS) |
| Ambiente software | ROS2 HUMBLE |
| Simulazione/visualizzazione | Gazebo, RViz |
Configurazioni Versione (Differenze)
| Articolo | Kit Standard | Kit Superiore | Kit Ultimate |
|---|---|---|---|
| Controllo Master | Raspberry Pi 5; RDK X5; Jetson Nano B01 | Raspberry Pi 5; RDK X5; Jetson Nano B01; Jetson Orin Nano SUPER | Raspberry Pi 5; RDK X5; Jetson Nano B01; Jetson Orin Nano SUPER |
| Modulo Vocale | Includere | ||
| Fotocamera | Fotocamera PTZ 2MP HD | Fotocamera di profondità Nuwa-HP60C PTZ | Fotocamera di profondità Nuwa-HP60C PTZ |
| LiDAR | T-mini Plus LiDAR | T-mini Plus LiDAR | SLAM C1 LiDAR |
Suggerimenti per la Selezione della Configurazione del Robot ROS (come elencato)
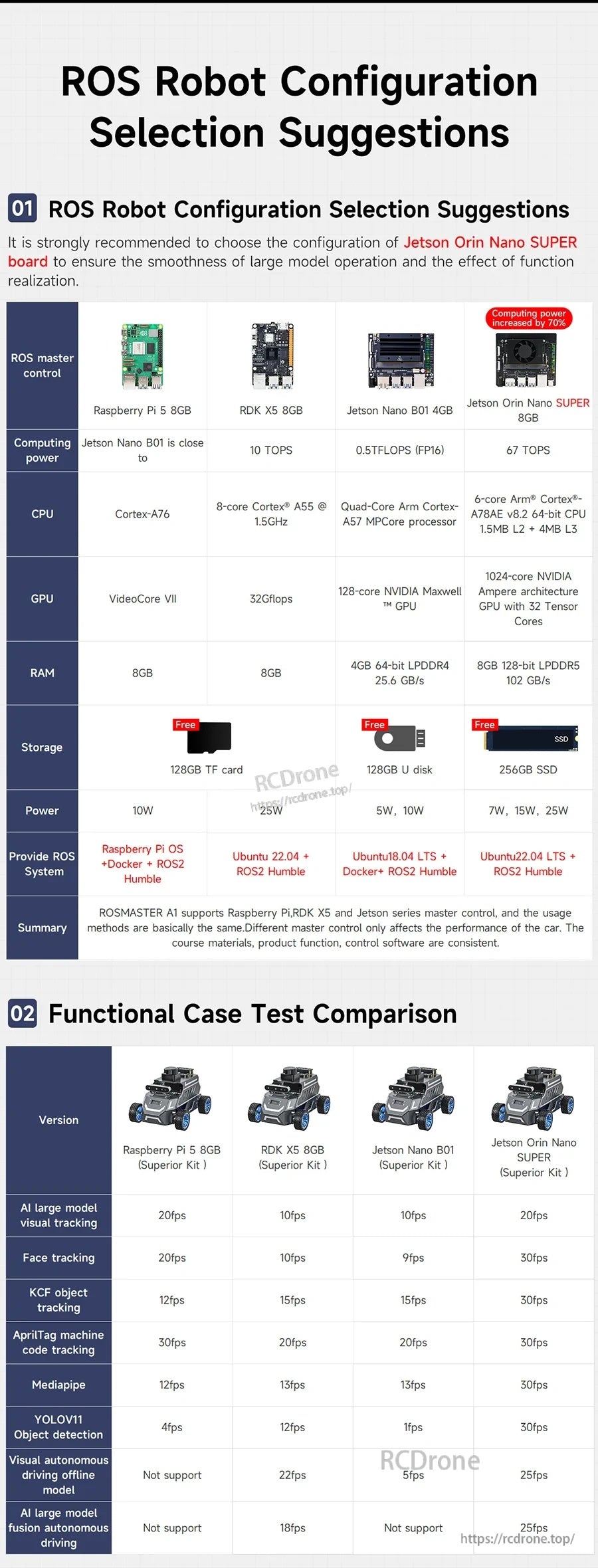
Si consiglia vivamente di scegliere la configurazione della scheda Jetson Orin Nano SUPER per garantire la fluidità dell'operazione di grandi modelli e l'efficacia della realizzazione delle funzioni. (Etichetta mostrata: “Potenza di calcolo aumentata del 70%”.)
| Controllo master ROS | Raspberry Pi 5 8GB | RDK X5 8GB | Jetson Nano B01 4GB | Jetson Orin Nano SUPER 8GB |
|---|---|---|---|---|
| Potenza di calcolo | Jetson Nano B01 è vicino a | 10 TOPS | 0.5TFLOPS (FP16) | 67 TOPS |
| CPU | Cortex-A76 | 8-core Cortex-A55 @ 1.5GHz | Processore Quad-Core Arm Cortex-A57 MPCore | CPU Arm Cortex-A78AE v8.2 a 6 core 64-bit; 1.5MB L2 + 4MB L3 |
| GPU | VideoCore VII | 32Gflops | 128-core NVIDIA Maxwell GPU | 1024-core NVIDIA Ampere architecture GPU with 32 Tensor Cores |
| RAM | 8GB | 8GB | 4GB 64-bit LPDDR4; 25.6 GB/s | 8GB 128-bit LPDDR5; 102 GB/s |
| Archiviazione | 128GB TF card (Gratis) | 128GB U disk (Gratis) | 256GB SSD (Gratis) | |
| Alimentazione | 10W | 25W | 5W, 10W | 7W, 15W, 25W |
| Fornire sistema ROS | Raspberry Pi OS + Docker + ROS2 Humble | Ubuntu 22.04 + ROS2 Humble | Ubuntu18.04 LTS + Docker+ ROS2 Humble | Ubuntu22.04 LTS + ROS2 Humble |
Testo riassuntivo mostrato: ROSMASTER A1 supporta Raspberry Pi, RDK X5 e la serie Jetson come controllo principale, e i metodi di utilizzo sono fondamentalmente gli stessi. Diversi controlli principali influenzano solo le prestazioni dell'auto. I materiali del corso, la funzione del prodotto e il software di controllo sono coerenti.
Confronto Test Funzionale Case (Kit Superiore)
| Funzione | Raspberry Pi 5 8GB | RDK X5 8GB | Jetson Nano B01 | Jetson Orin Nano SUPER |
|---|---|---|---|---|
| Tracciamento visivo di modelli AI di grandi dimensioni | 20fps | 10fps | 10fps | 20fps |
| Tracciamento del volto | 20fps | 10fps | 9fps | 30fps |
| Tracciamento oggetti KCF | 12fps | 15fps | 15fps | 30fps |
| Tracciamento codice macchina AprilTag | 30fps | 20fps | 20fps | 30fps |
| Mediapipe | 12fps | 13fps | 13fps | 30fps |
| Rilevamento oggetti YOLOV11 | 4fps | 12fps | 1fps | 30fps |
| Modello offline di guida autonoma visiva | Non supportato | 22fps | 5fps | 25fps |
| Fusione di modelli AI di grandi dimensioni per guida autonoma | Non supportato | 18fps | Non supportato | 25fps |
Funzioni ROS (In evidenza)
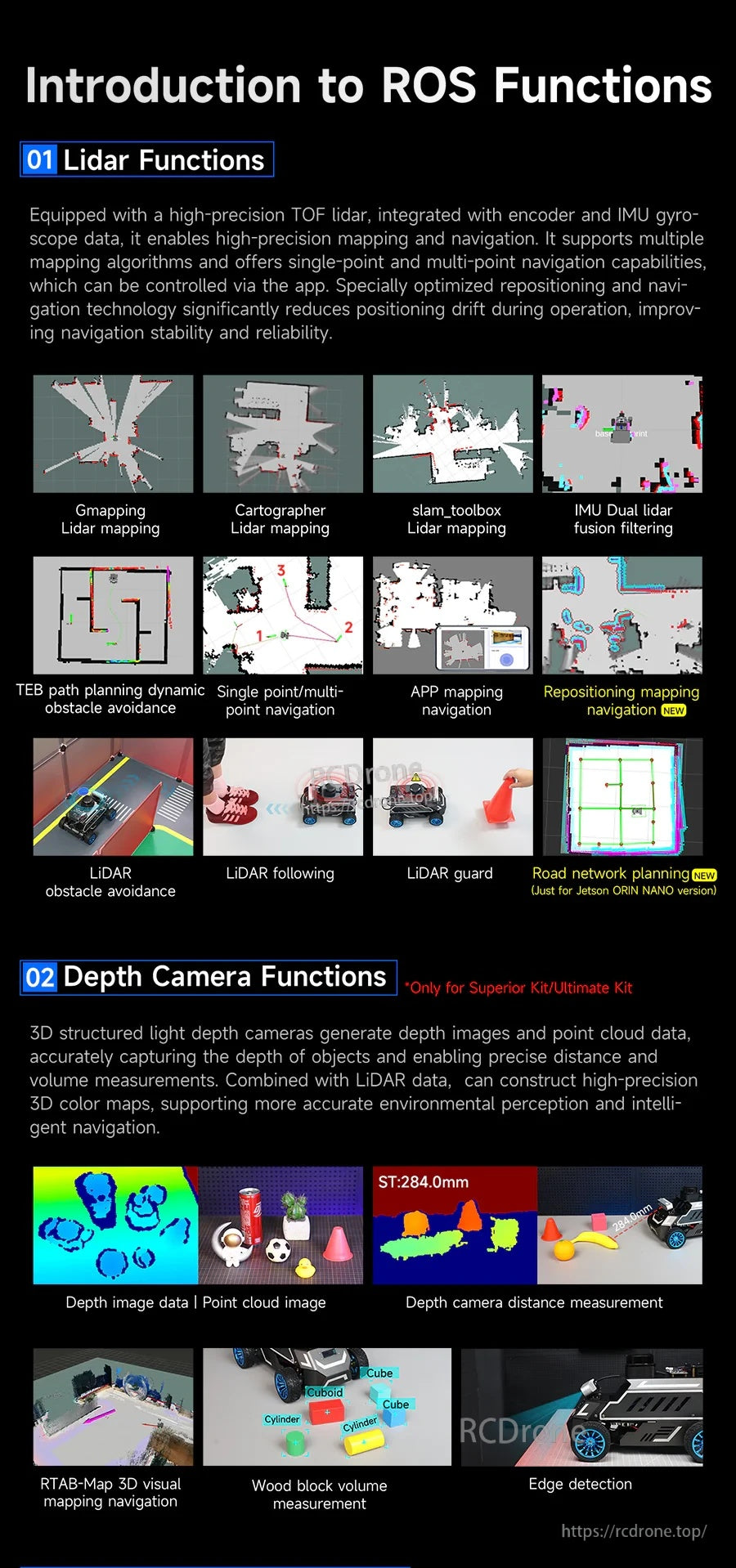
- Funzioni LiDAR: LiDAR TOF ad alta precisione integrato con dati di encoder e giroscopio IMU per mappatura e navigazione; supporta più algoritmi di mappatura e navigazione a punto singolo/multiplo; controllabile tramite app; riposizionamento e navigazione ottimizzati per ridurre la deriva di posizionamento e migliorare stabilità e affidabilità.
- Componenti di mappatura/navigazione supportati (come mostrato): Gmapping mappatura LiDAR; Cartographer mappatura LiDAR; slam_toolbox mappatura LiDAR; IMU fusione filtraggio duale LiDAR; Pianificazione del percorso TEB evitamento ostacoli dinamici; APP mappatura navigazione; riposizionamento mappatura navigazione.
- Pianificazione della rete stradale: etichettato come NUOVO e mostrato come “Solo per versione Jetson ORIN NANO”.
- Funzioni della fotocamera di profondità (Solo per Superior Kit/Ultimate Kit): La fotocamera di profondità a luce strutturata 3D produce immagini di profondità e dati di nuvole di punti; supporta la misurazione della distanza e del volume; può essere combinata con LiDAR per costruire mappe 3D a colori ad alta precisione per una migliore percezione e navigazione. Gli esempi mostrati includono RTAB-Map mappatura visiva 3D navigazione, misurazione del volume del blocco di legno e rilevamento dei bordi.
Note sulle Funzioni / Limitazioni (come indicato)
- Guida autonoma: La versione Raspberry Pi non supporta questa funzione.
- Pianificazione della rete stradale: Le versioni Raspberry Pi e Jetson NANO 4GB non supportano questa funzione.
- Navigazione mappa del percorso SLAM / applicazione mappa del percorso: mostrato con la nota “È necessario acquistare la mappa del percorso da soli”; la mappa del percorso non è inclusa.
- Distanza profonda Q&A: contrassegnato “Solo per Superior Kit”.
Applicazioni
- Insegnamento di ROS2, laboratori in aula e progetti di curriculum di robotica
- Esperimenti di mappatura e navigazione SLAM (flusso di lavoro Gazebo/RViz)
- Verifica degli algoritmi per veicoli autonomi su un telaio con sterzo Ackerman (pianificazione del percorso, tracciamento della traiettoria, controllo dello sterzo)
- Progetti di visione artificiale: rilevamento e tracciamento di oggetti, riconoscimento visivo e interazione visiva/vocale
- Navigazione multi-punto e gestione del percorso in stile rete stradale (supportato su configurazioni di controllo master specifiche come indicato)
Per la guida alla configurazione pre-vendita (selezione del kit Standard/Superior/Ultimate) o assistenza per l'integrazione con ROS2 HUMBLE, contattare [email protected] or visitare https://rcdrone.top/.
Manuali
Link al tutorial: ROSMASTER A1
Video
Dettagli
ROSMASTER A1 è una piattaforma robotica Ackerman ROS2 Humble progettata per la ricerca su SLAM, navigazione e AI incarnata.
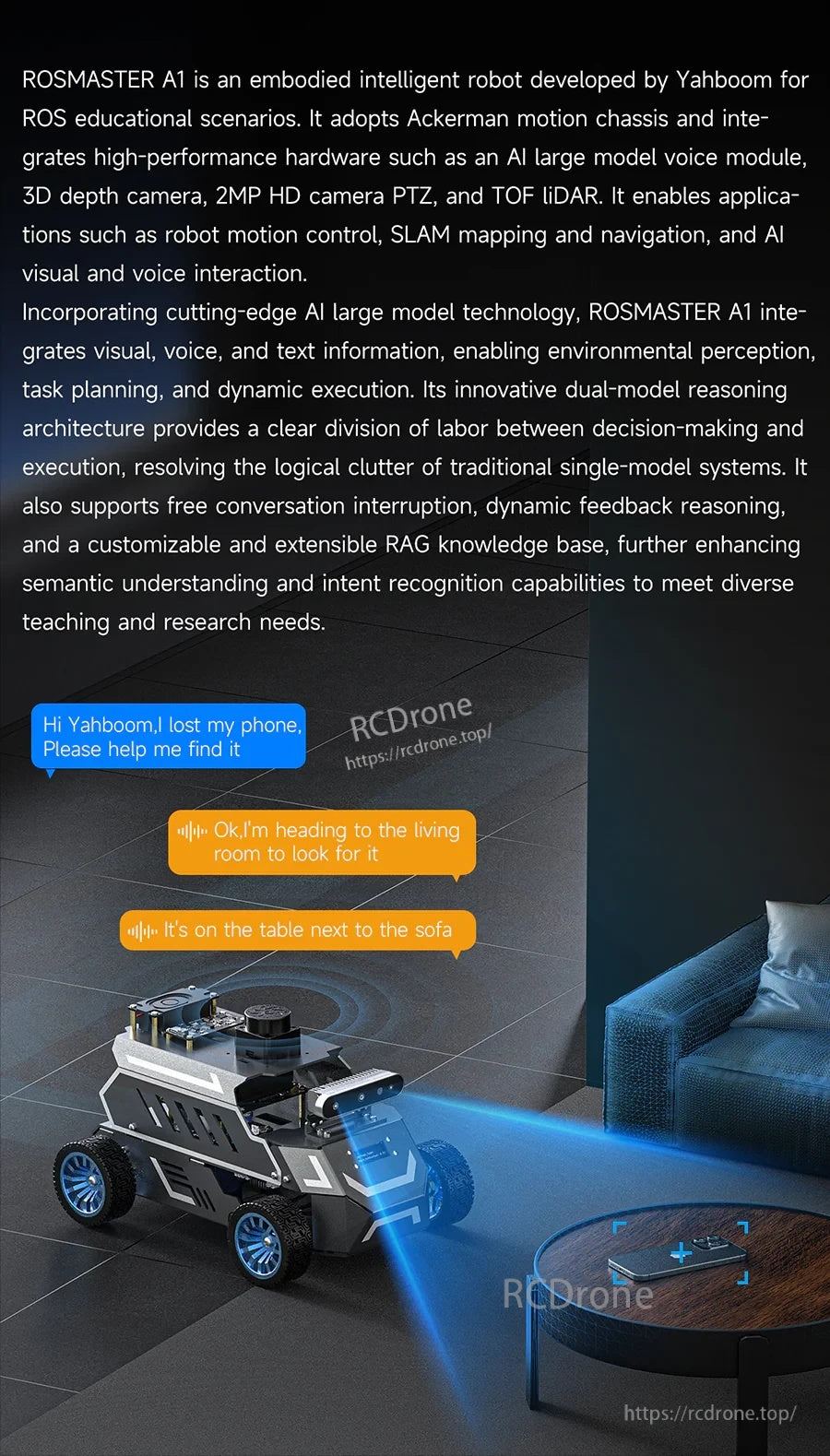
L'interazione multimodale combina comandi vocali con percezione visiva per compiti di navigazione a mani libere.

Opzioni hardware espandibili aggiungono visione di profondità e LiDAR TOF per supportare mappatura, evitamento ostacoli e percezione.
Scegli una configurazione del kit basata sulla piattaforma di calcolo e sui sensori necessari per il tuo carico di lavoro ROS2.
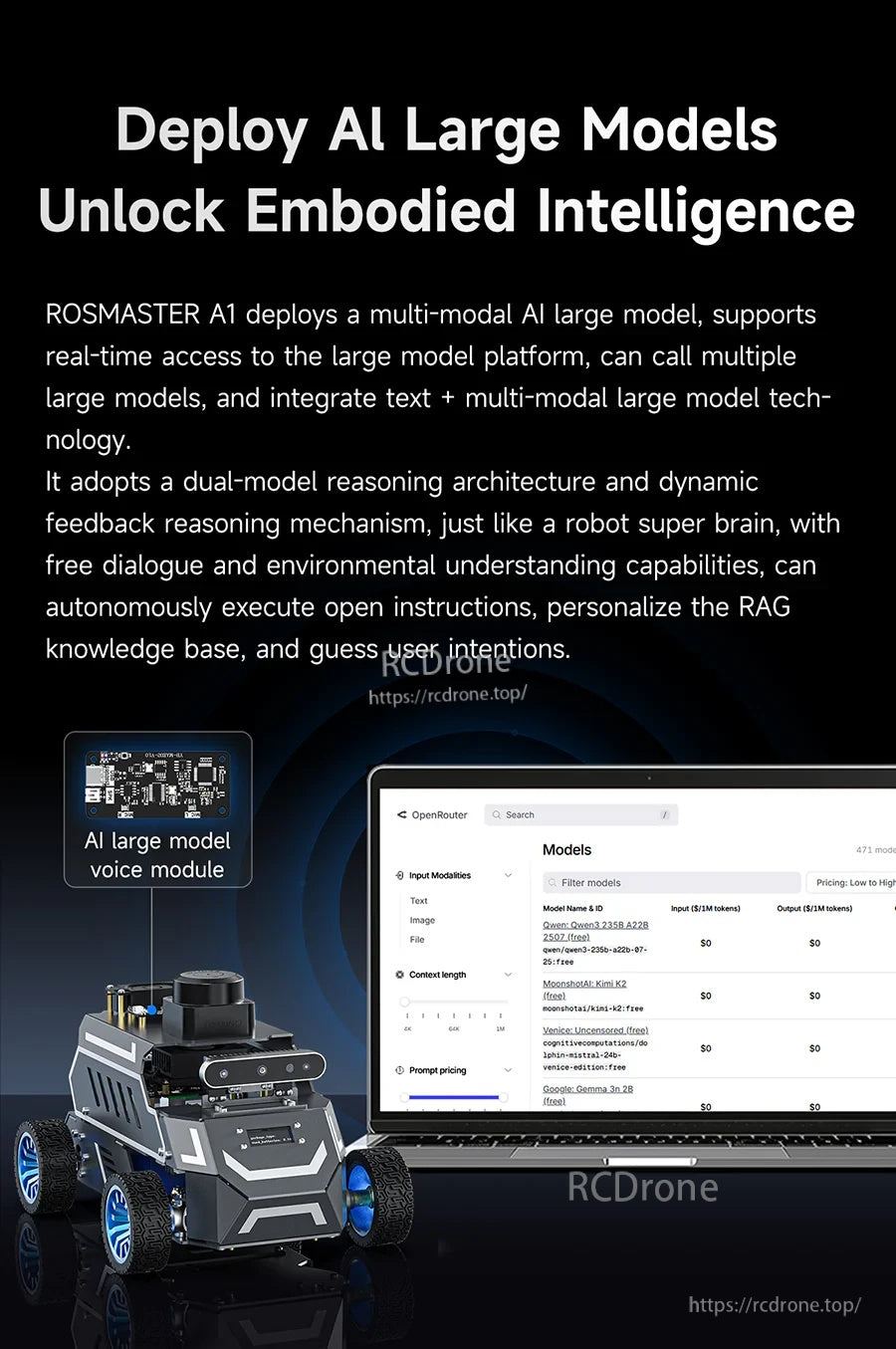
Connettiti a servizi di modelli di grandi dimensioni e integra flussi di lavoro vocali, testuali e visivi per progetti di intelligenza incarnata.
Tre modalità—testo, voce e visione—supportano un'interazione uomo-robot più ricca e una migliore comprensione dei compiti.
Una geometria di sterzo Ackerman simile a quella di un veicolo si abbina a un servomotore ad alta coppia e a un motore con encoder per un controllo preciso.
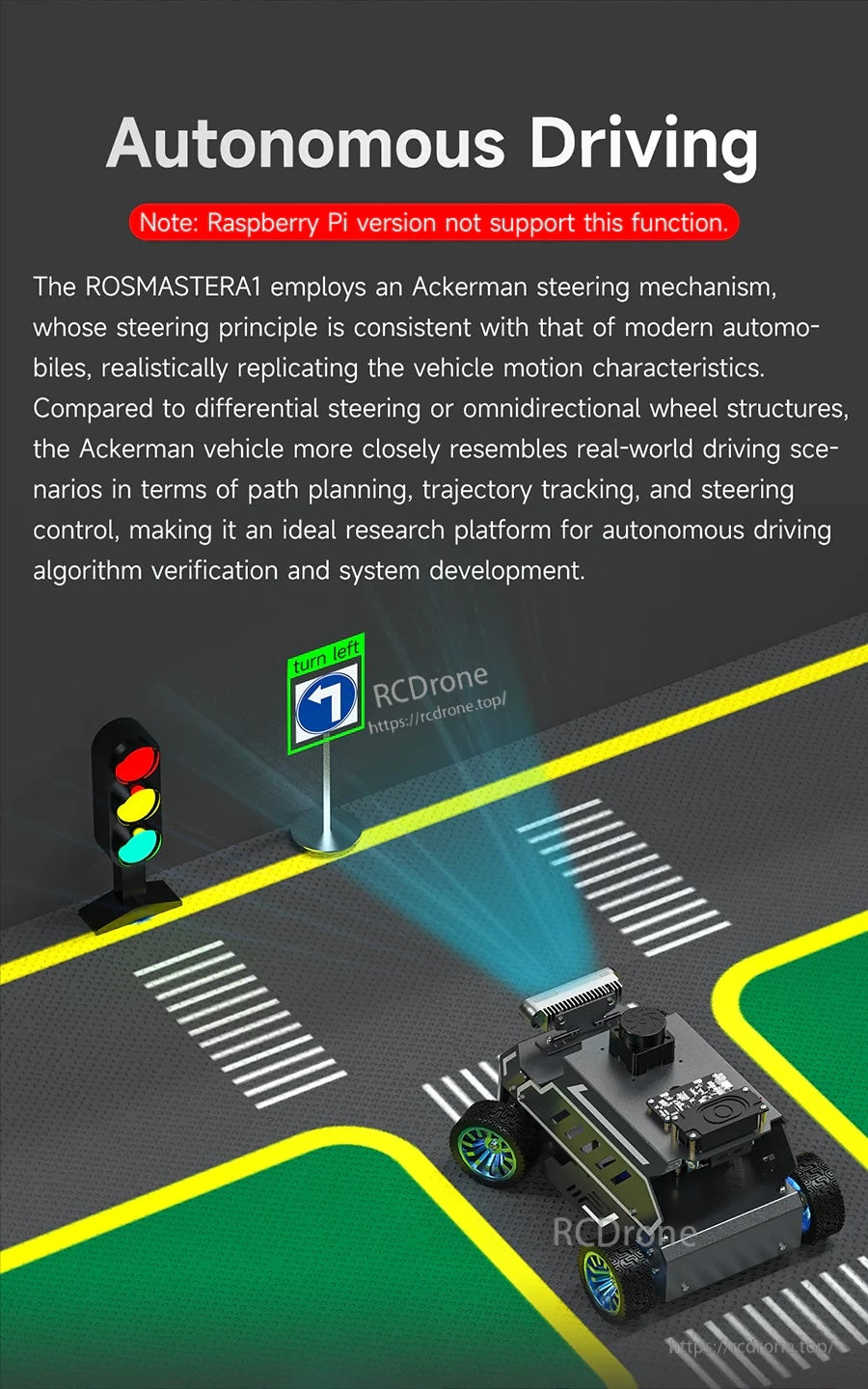
Lo sterzo Ackerman aiuta a replicare il comportamento reale delle auto per il tracciamento delle corsie e la verifica degli algoritmi di controllo.

Esempi di compiti di autonomia includono il rilevamento dei segnali, il mantenimento della corsia, i comportamenti di parcheggio e la logica decisionale del percorso.
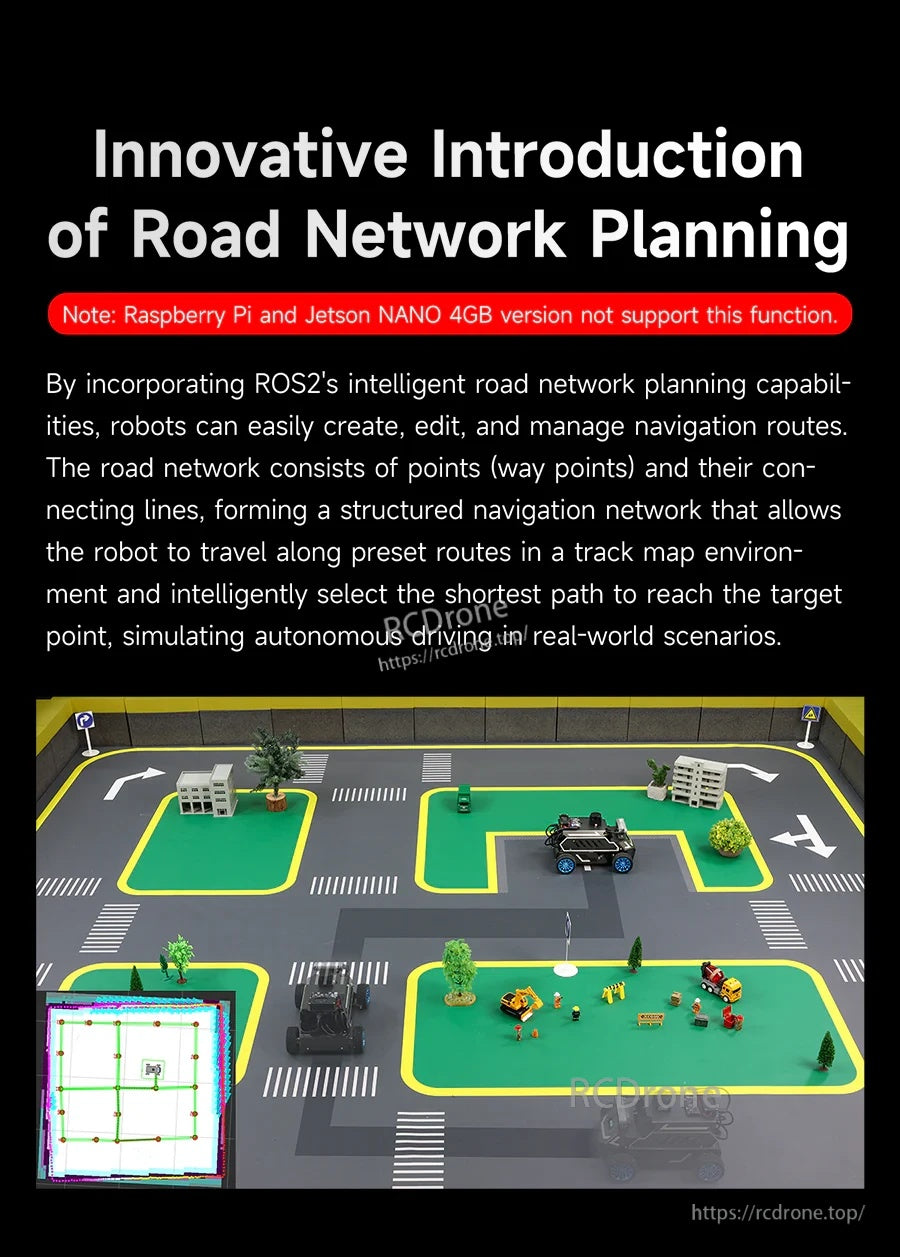
La pianificazione della rete stradale supporta percorsi di navigazione strutturati per ambienti in stile pista e viaggi a waypoint.
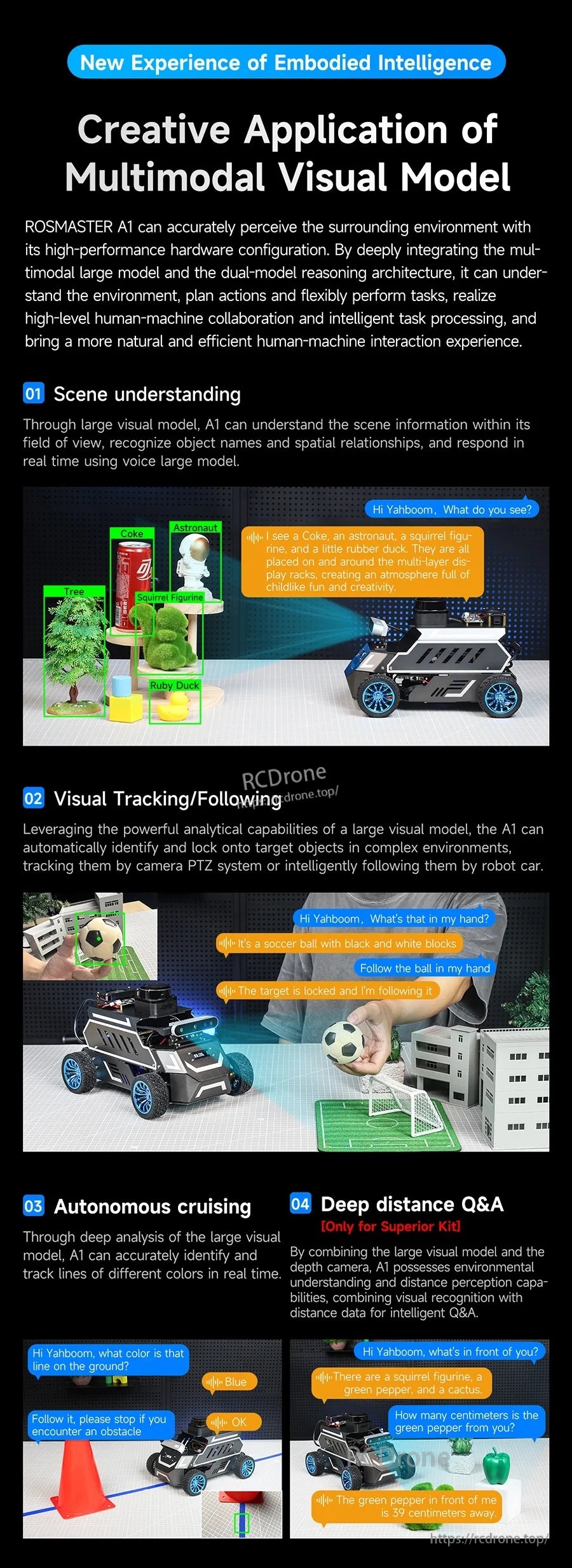
Casi d'uso di livello superiore combinano percezione e dialogo per demo interattive, tracciamento e risposta a domande.
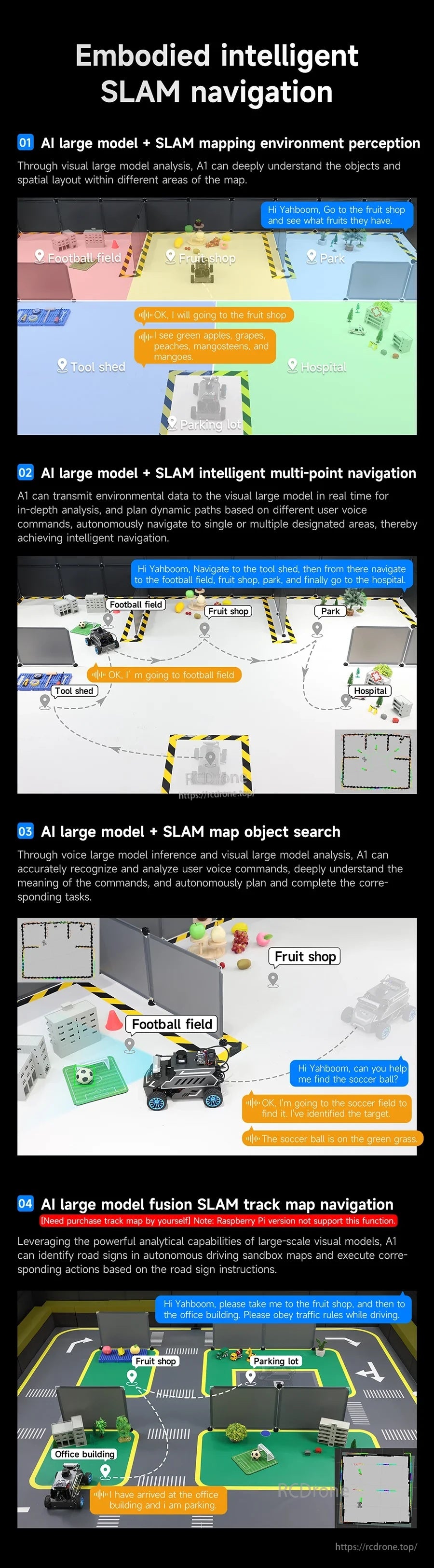
I flussi di lavoro SLAM coprono la mappatura, la navigazione multi-punto e la ricerca basata su mappe per esperimenti di autonomia indoor.
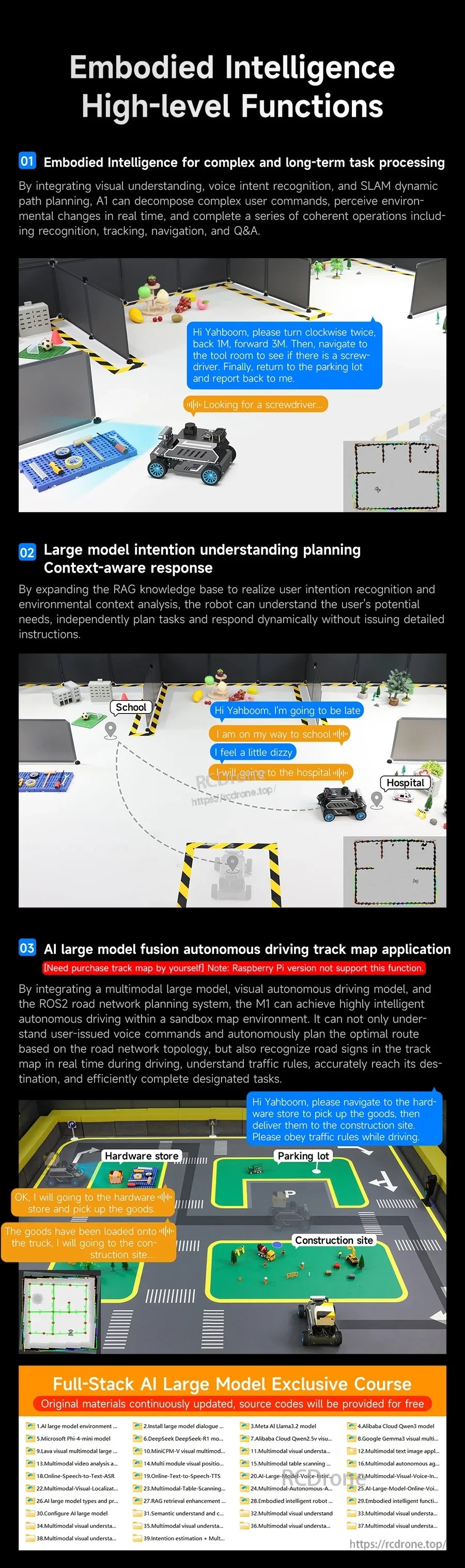
Comportamenti avanzati si basano sulla comprensione dell'ambiente e sull'interpretazione dei comandi per eseguire obiettivi di navigazione.
La guida del controller aiuta a abbinare le prestazioni di calcolo e le interfacce al tuo stack di sensori e alle funzionalità ROS2.
La mappatura LiDAR e il rilevamento della profondità consentono la percezione 2D/3D, la misurazione della distanza e la pianificazione della navigazione.
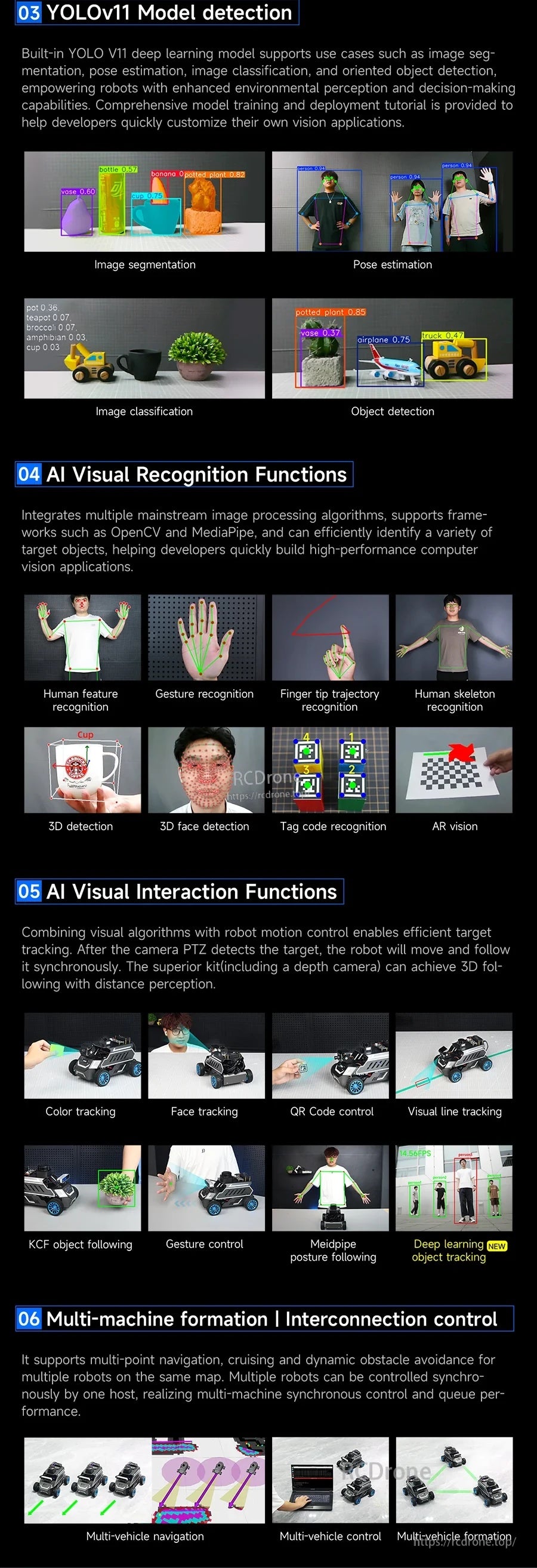
Un toolkit di visione artificiale supporta il rilevamento degli oggetti, i compiti di riconoscimento e i comportamenti interattivi basati sulla visione.
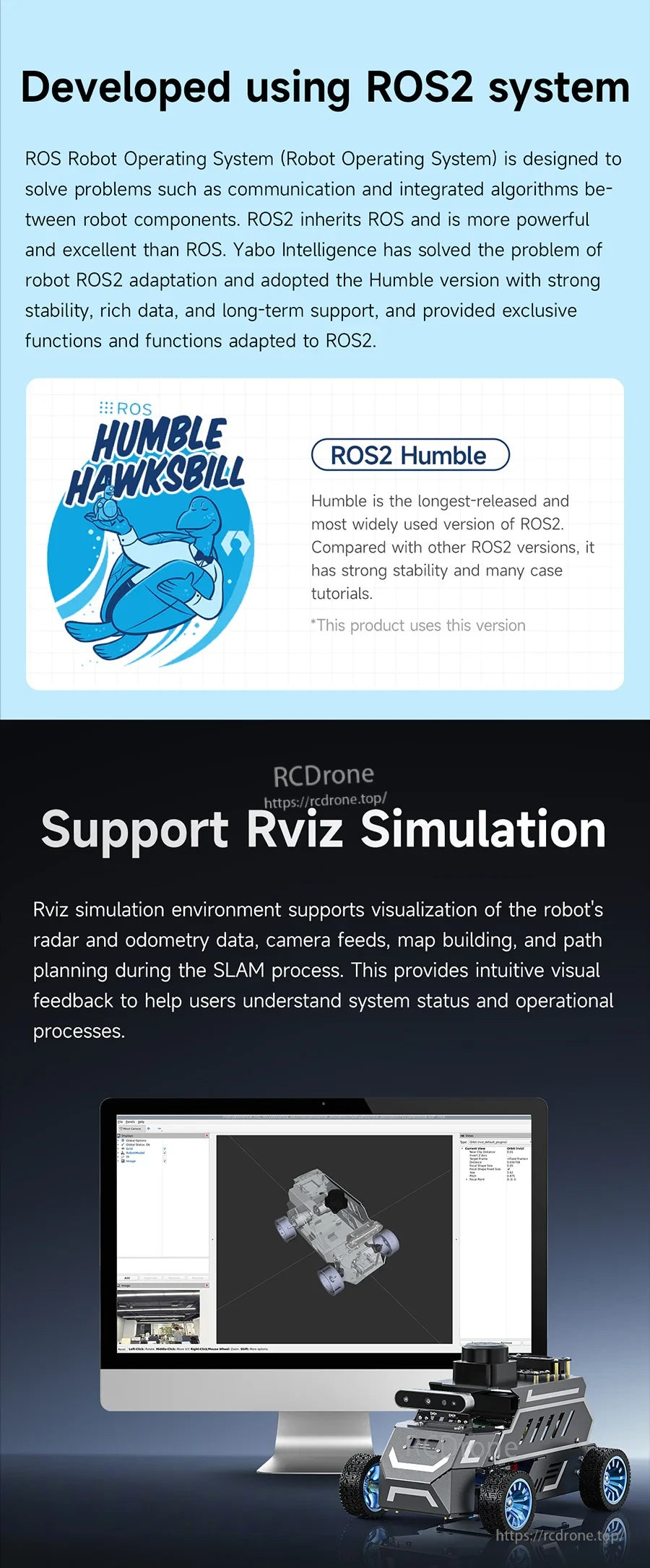
La compatibilità con ROS2 Humble e il supporto alla simulazione RViz accelerano lo sviluppo, il test e la visualizzazione.
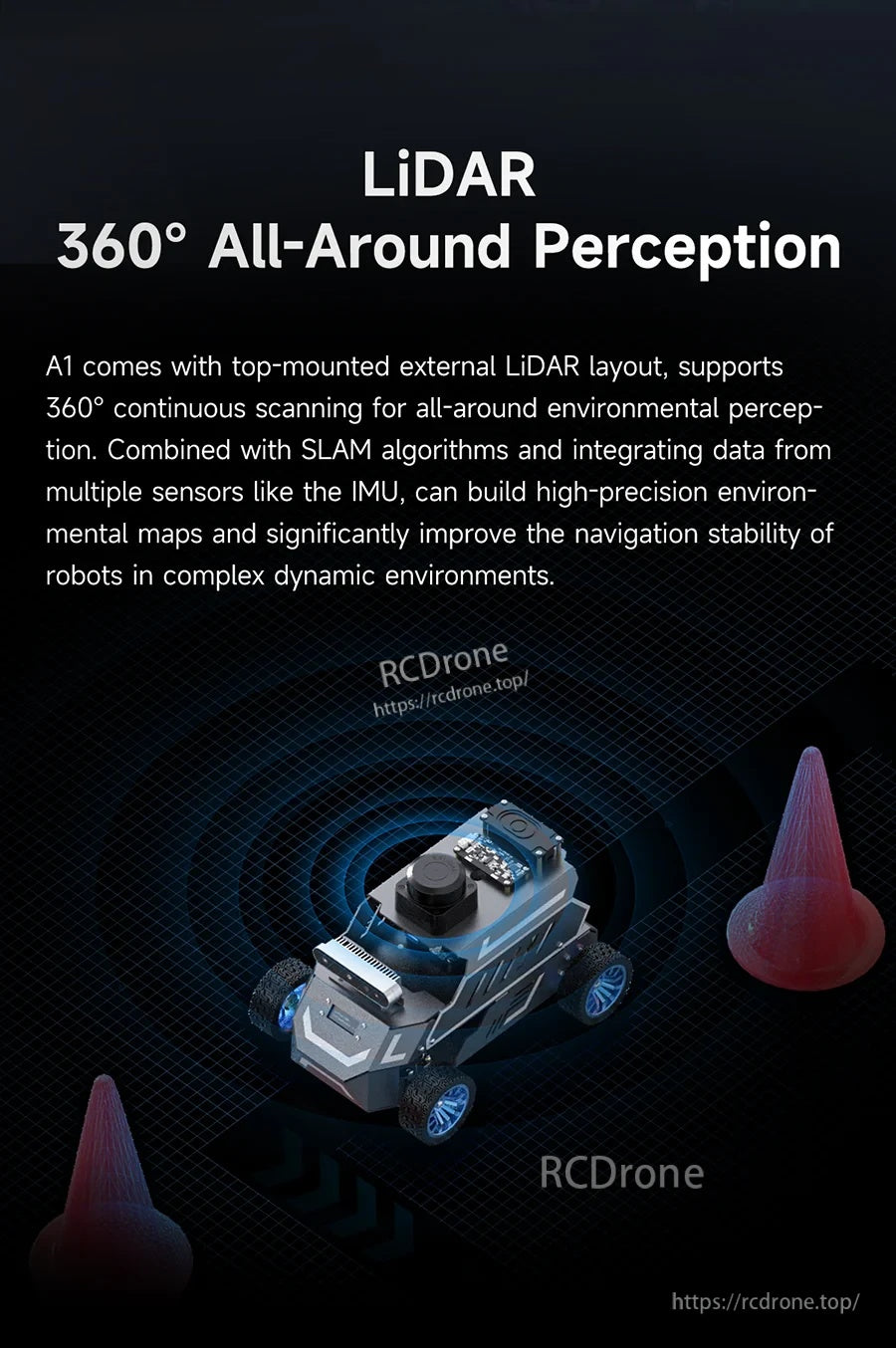
La percezione LiDAR a 360° migliora l'affidabilità della mappatura e la consapevolezza degli ostacoli in ambienti dinamici.

Il ROSMASTER A1 supporta il controllo remoto multipiattaforma tramite un'app di mappatura iOS/Android, un'interfaccia per computer o un controller wireless USB standard.
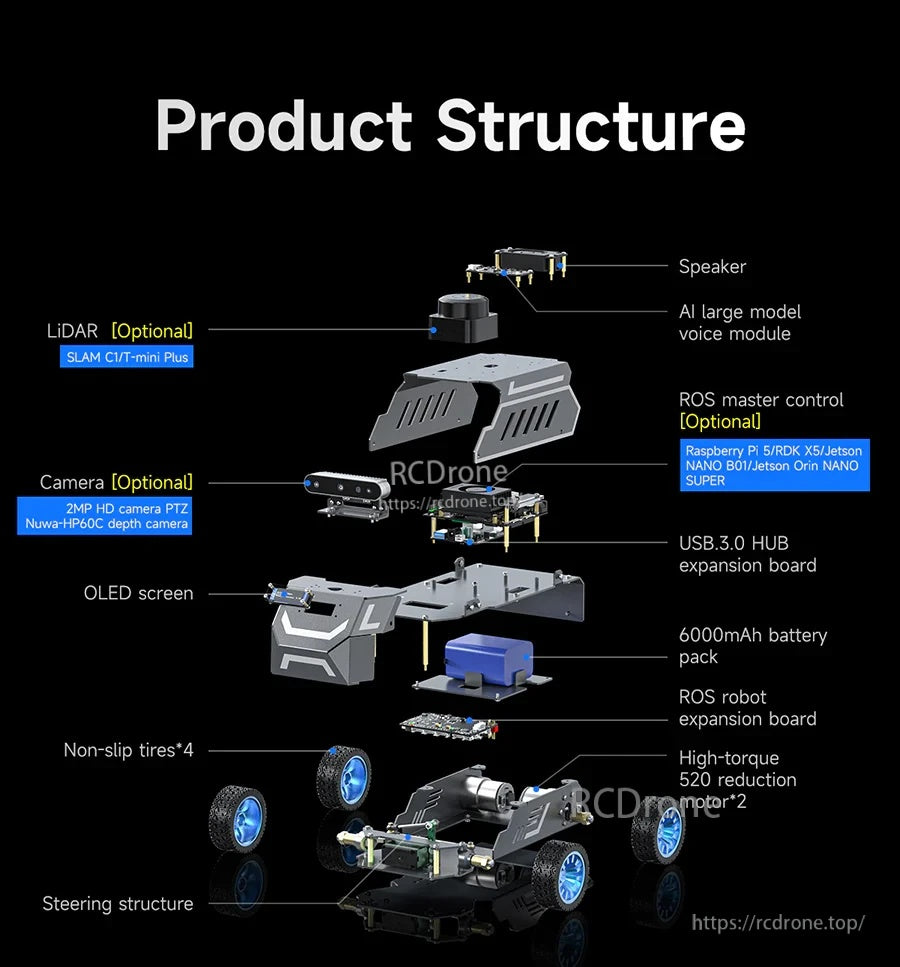
Il ROSMASTER A1 utilizza un telaio stratificato con un pacco batteria da 6000mAh, espansione hub USB 3.0 e moduli opzionali LiDAR o fotocamera per costruzioni flessibili.
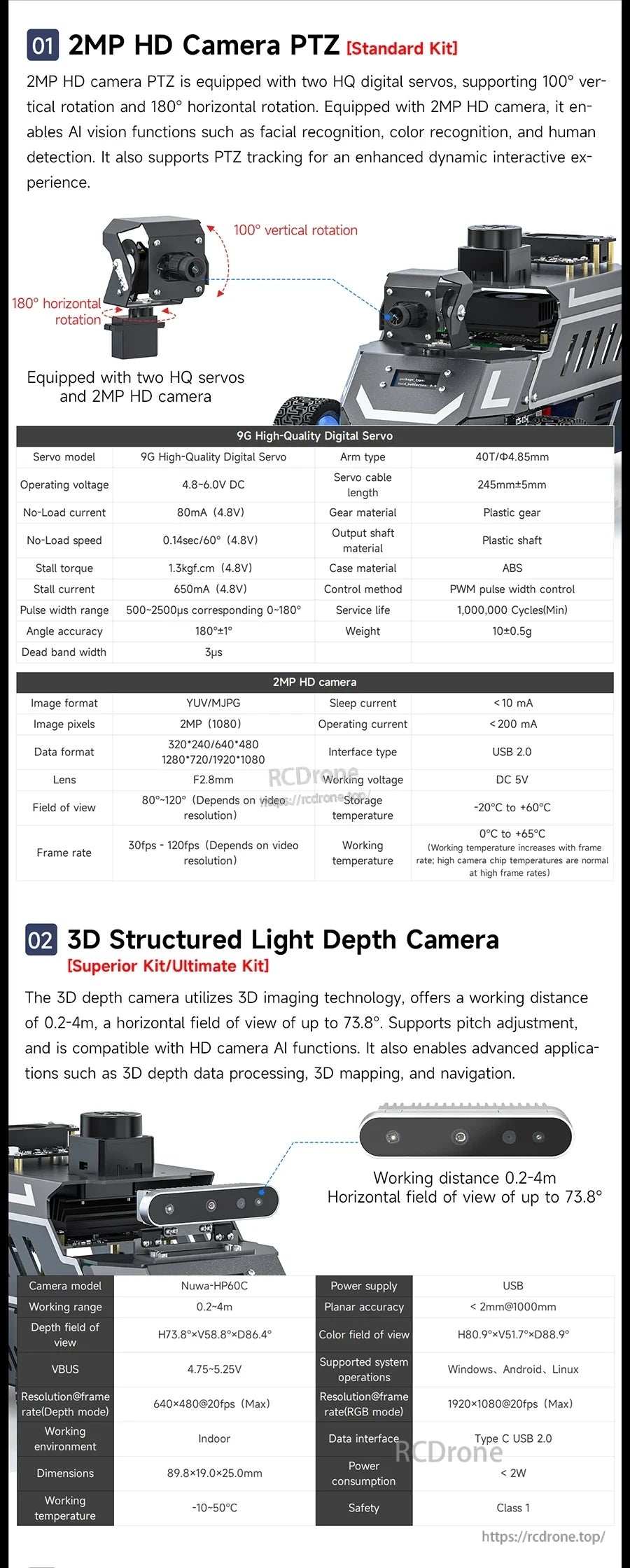
Yahboom ROSMASTER A1 supporta una fotocamera HD PTZ da 2MP con rotazione orizzontale di 360° e verticale di 180° o una fotocamera a profondità di luce strutturata 3D con un raggio di 0,2–4 m.
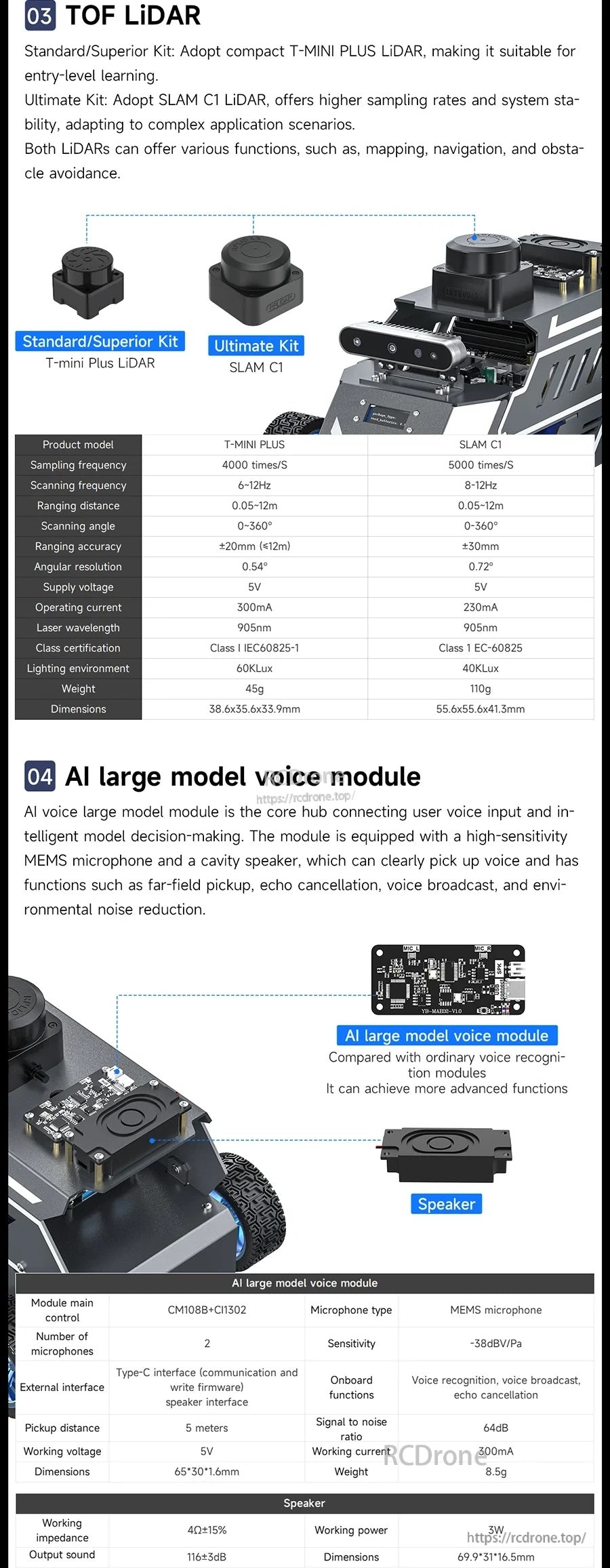
Il robot Yahboom ROSMASTER A1 ROS2 integra un LiDAR TOF sulla parte superiore e un modulo vocale AI con microfono e altoparlante per la navigazione e l'interazione vocale.
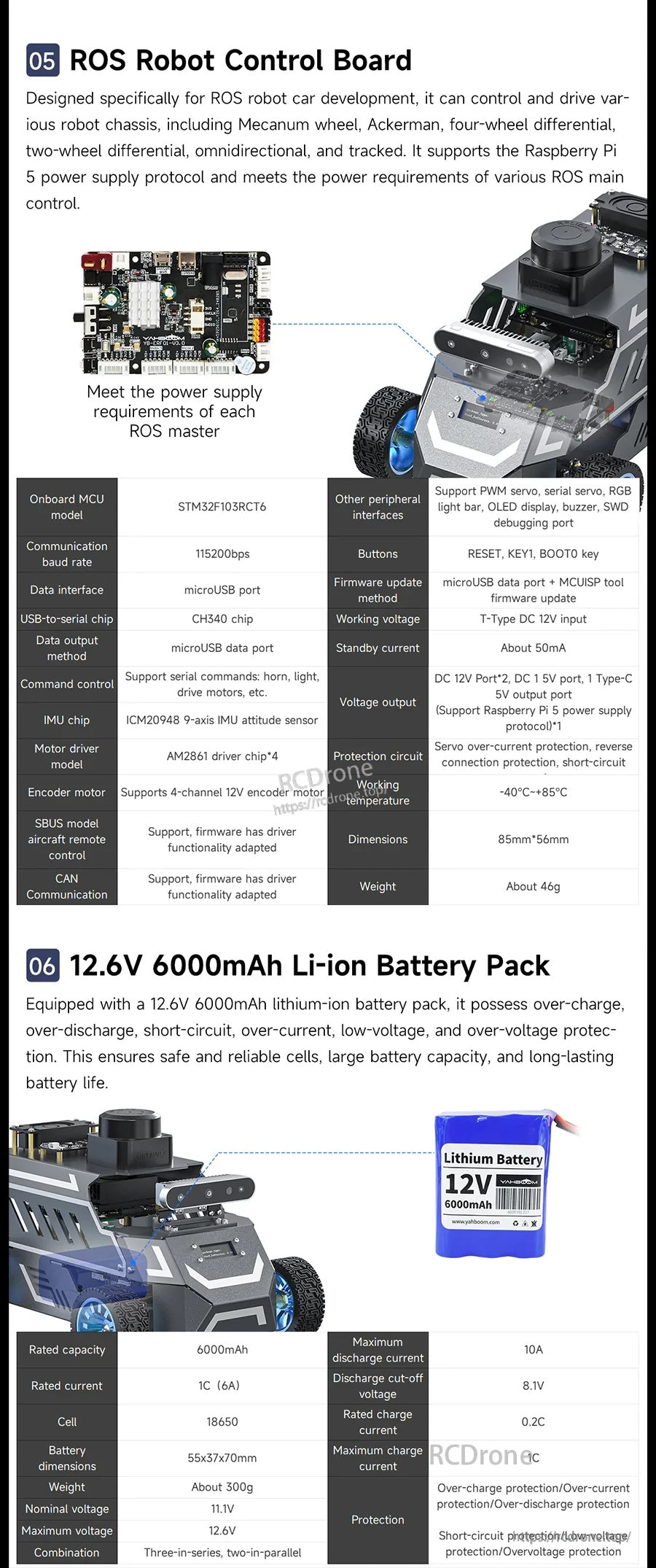
Il kit robot ROSMASTER A1 ROS2 abbina una scheda di controllo robot ROS a un pacco batteria Li-ion da 12,6V 6000mAh per alimentare la costruzione.
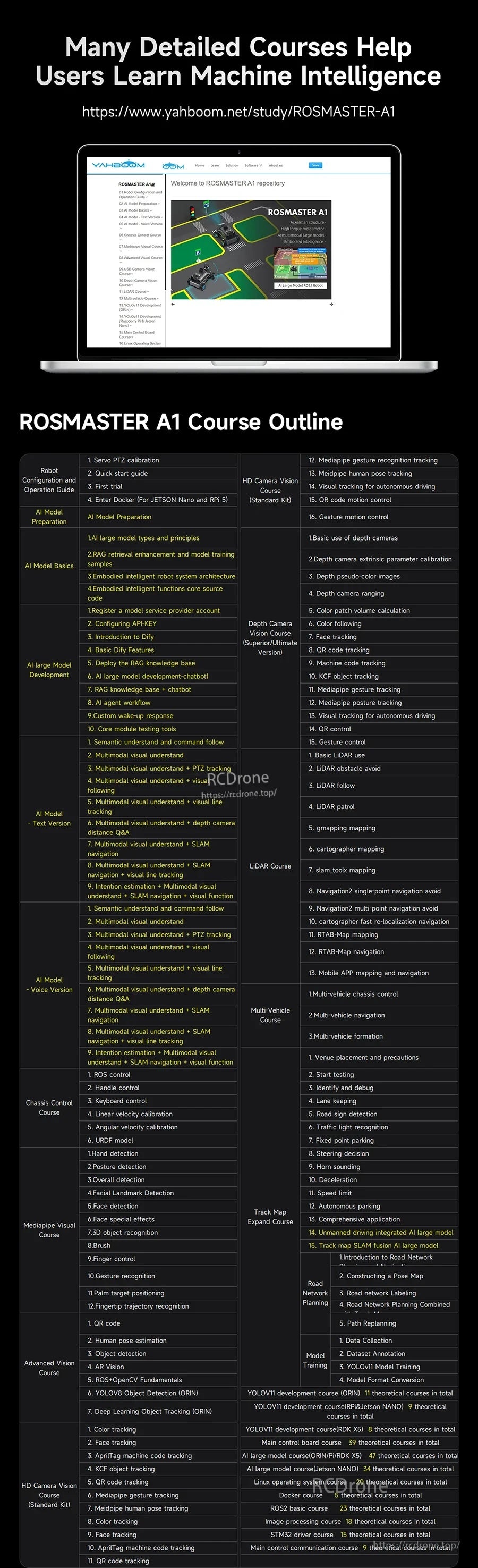
Il programma del corso ROSMASTER A1 delinea passo dopo passo gli argomenti di apprendimento ROS2, dalla configurazione e controllo di base alla mappatura e navigazione.
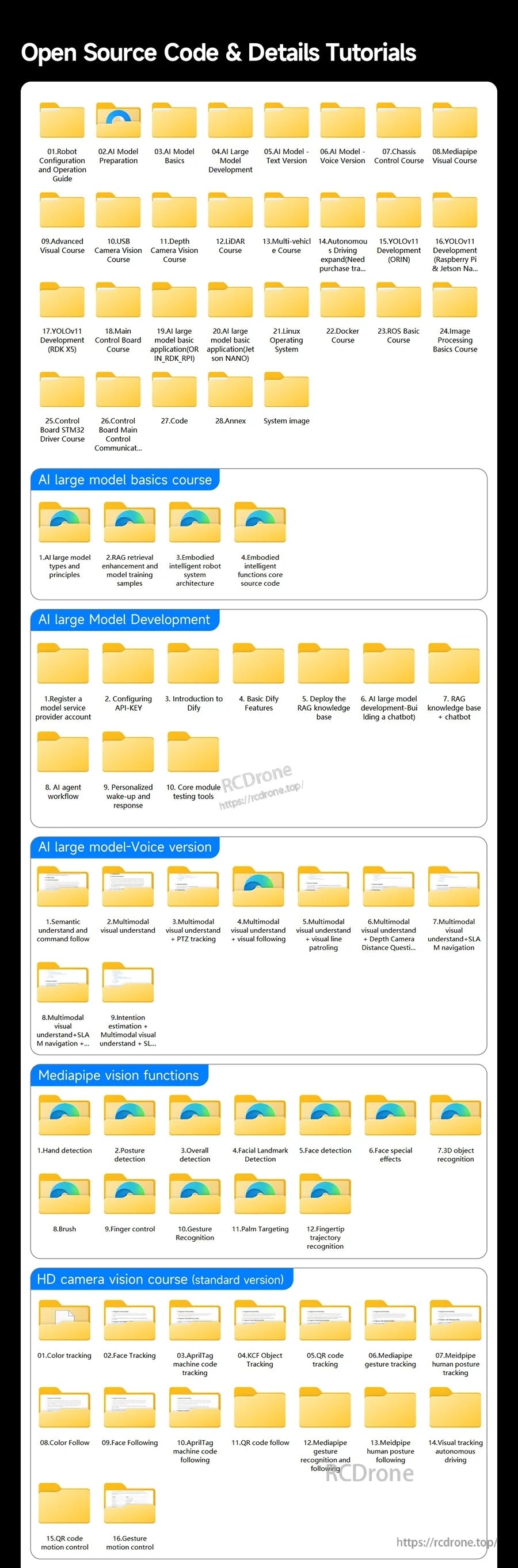
Il codice open-source e le cartelle tutorial passo-passo ti aiutano a iniziare con la configurazione, la programmazione e le dimostrazioni di ROS2.
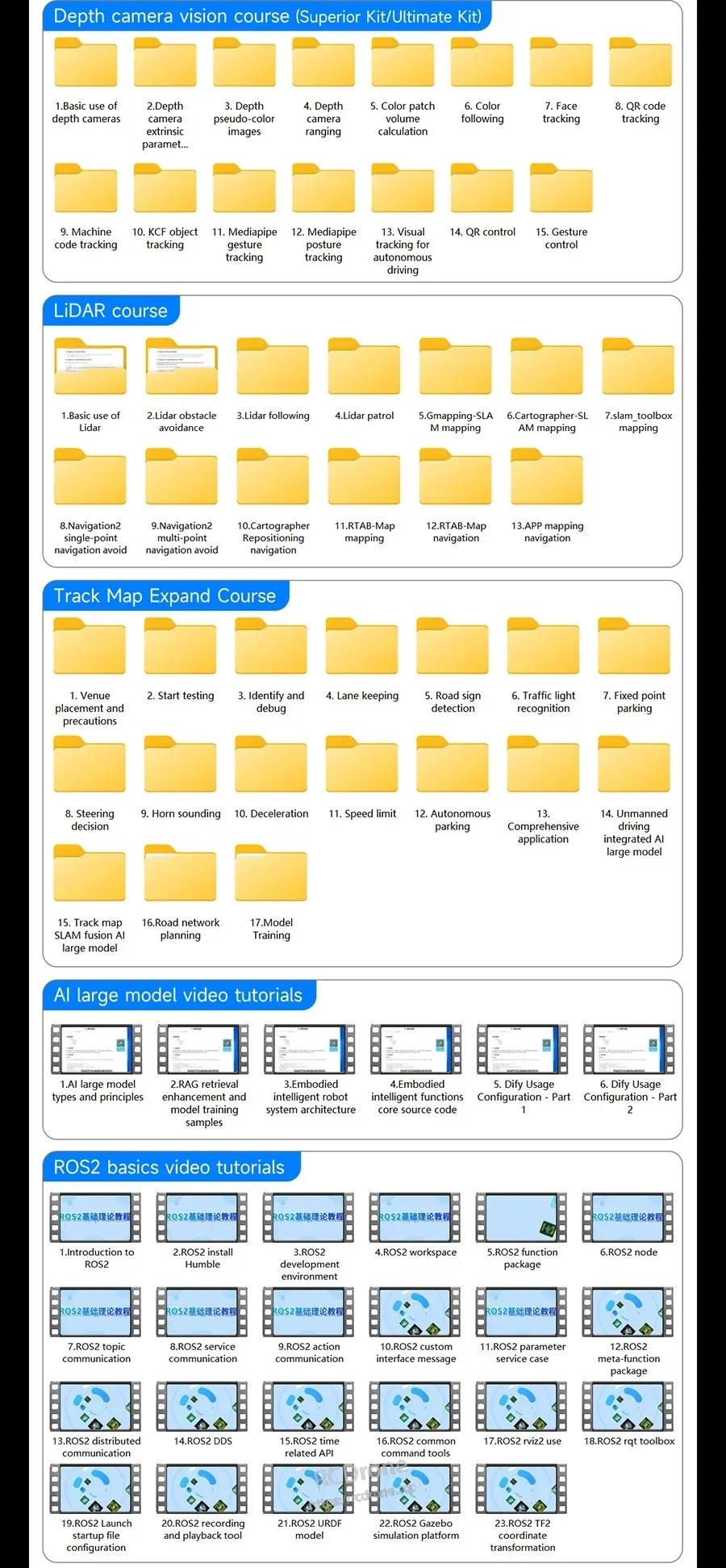
Le risorse di apprendimento ROSMASTER A1 coprono la visione della fotocamera di profondità, la configurazione del LiDAR, l'espansione della mappatura/tracciamento e le basi di ROS2 in moduli tutorial organizzati.
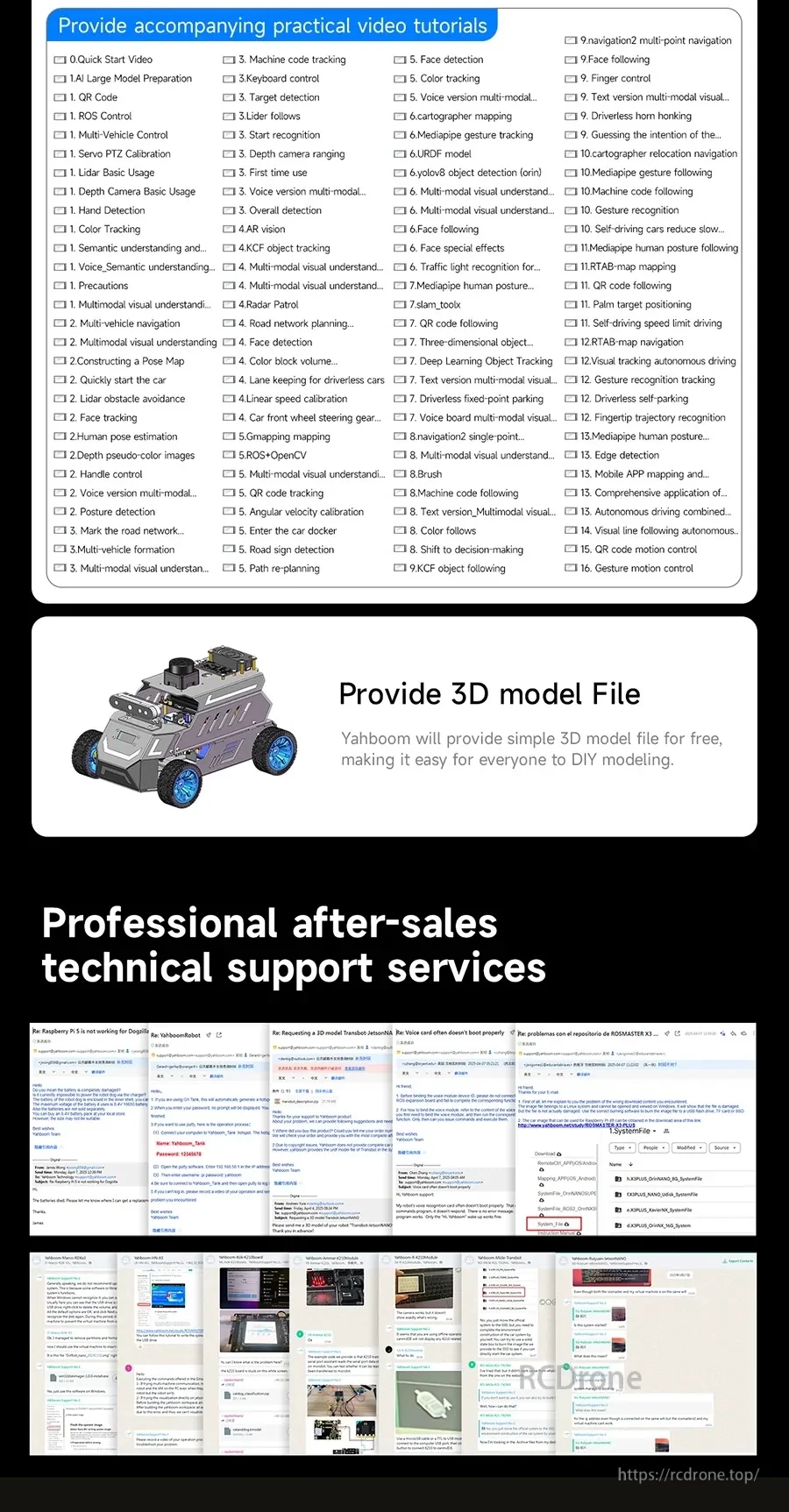
Yahboom ROSMASTER A1 include tutorial video pratici, file di modelli 3D scaricabili e supporto tecnico post-vendita per aiutare con l'installazione e l'apprendimento.

ROSMASTER A1 utilizza un telaio di sterzo Ackermann con ruote in gomma da 65 mm e supporta opzioni di telecamera RGBD e computer a bordo come Raspberry Pi 5 o Jetson.
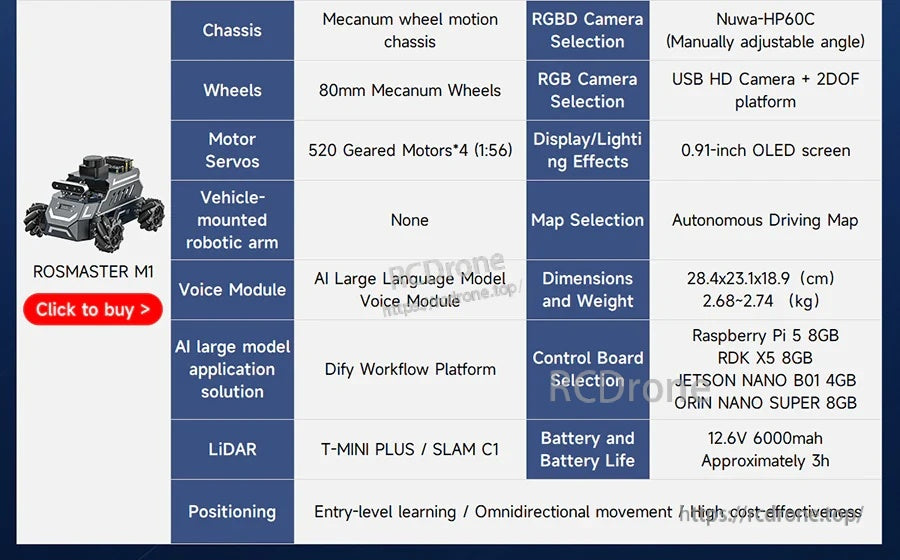
Le opzioni di configurazione di ROSMASTER A1 coprono l'hardware del telaio mecanum, le selezioni di telecamera RGBD e LiDAR, le schede di controllo e i dettagli della batteria.
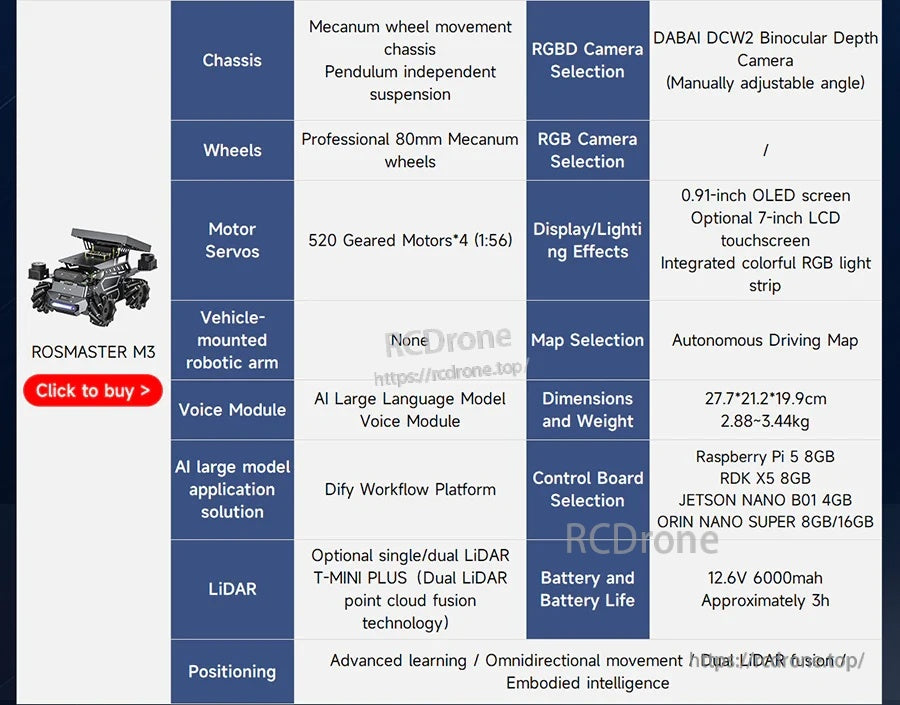
ROSMASTER A1 supporta un telaio con ruote mecanum con telecamera RGBD opzionale, LiDAR e scelte di schede di controllo multiple tra cui Raspberry Pi e Jetson.
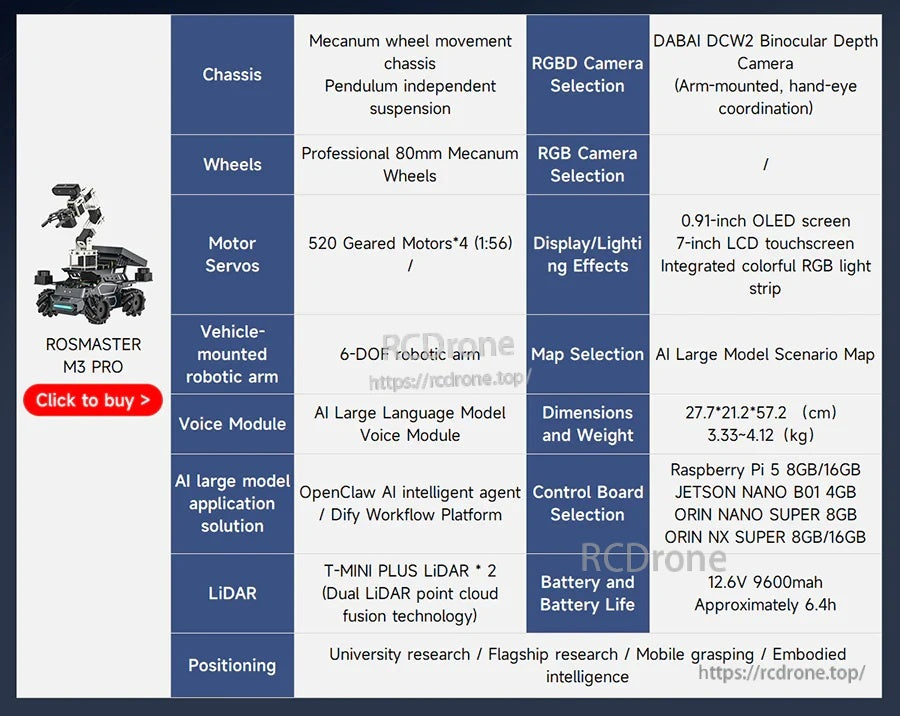
La piattaforma robotica ROSMASTER combina un telaio con ruote mecanum con opzioni come una telecamera RGBD e moduli di mappatura LiDAR per lo sviluppo ROS2.
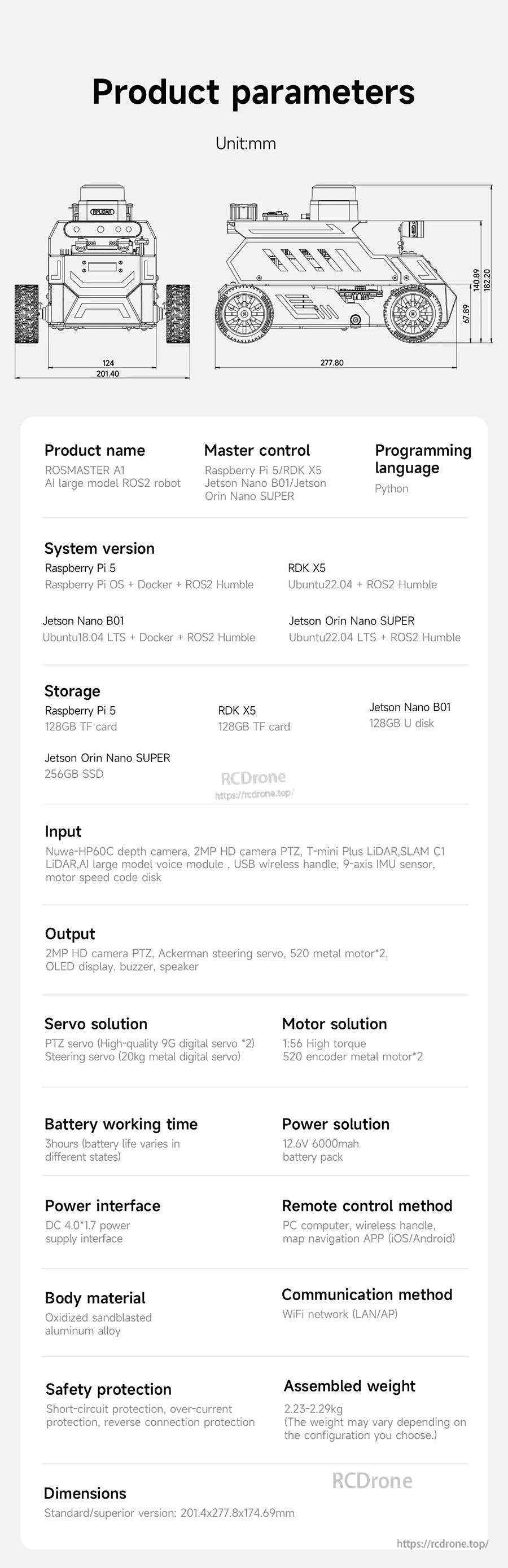
Le specifiche di ROSMASTER A1 delineano dettagli chiave come le opzioni di versione del sistema, lo storage, il tempo di funzionamento della batteria, le interfacce e le dimensioni complessive.
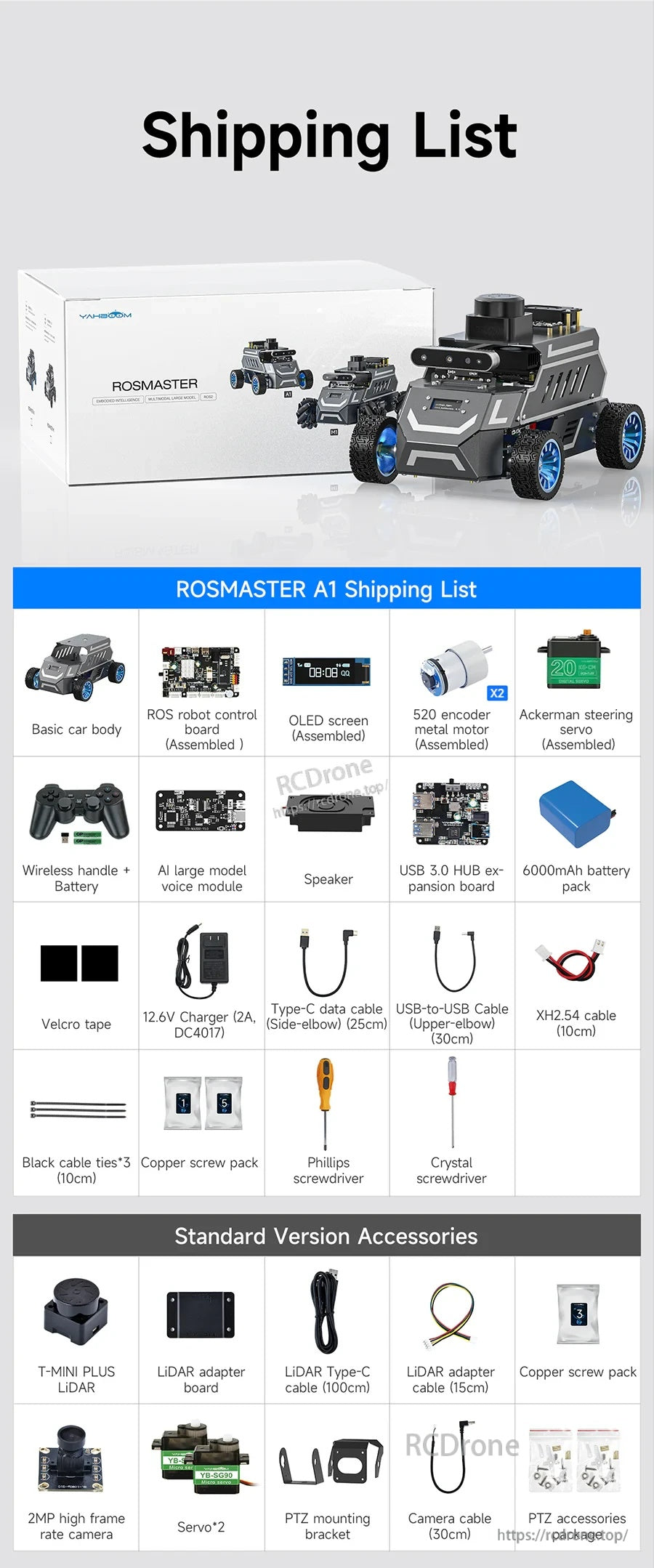
Il kit ROSMASTER A1 include il telaio del robot car e accessori chiave come la scheda di espansione del controllo, il display OLED, i motori encoder, la batteria, il manico wireless e i cavi di connessione per l'installazione.

I pacchetti di accessori ROSMASTER A1 elencano le opzioni LiDAR incluse, i moduli della fotocamera, le schede adattatrici, le staffe di montaggio, i cavi e i pacchetti di viti per le diverse versioni.
Related Collections






























