




Yahboom TT Motore DC con Encoder Hall 6V 1:45 355rpm Albero 5mm per Auto Intelligente Fai-da-te PID
Yahboom TT Motore DC con Encoder Hall 6V 1:45 355rpm Albero 5mm per Auto Intelligente Fai-da-te PID
Yahboom
Impossibile caricare la disponibilità di ritiro
Panoramica
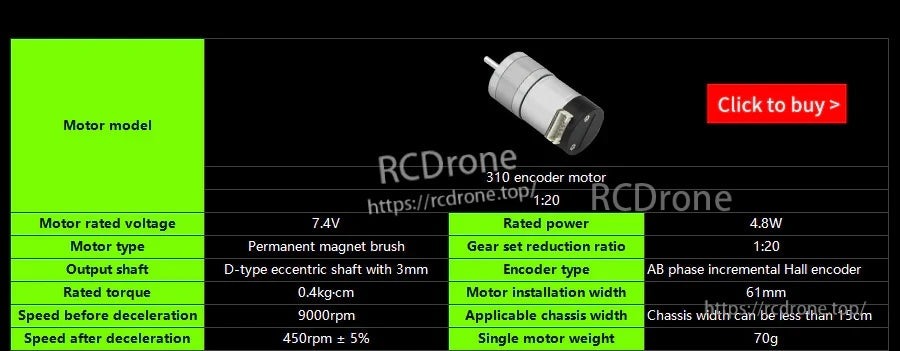
Questo motore a corrente continua Yahboom TT con encoder è progettato per costruzioni di auto intelligenti fai-da-te che necessitano di feedback di velocità a ciclo chiuso. Utilizza un encoder con sensore Hall ad alta precisione per la misurazione della velocità e la rilevazione della direzione (uscita a impulsi a due fasi AB), con prestazioni di velocità stabili, forte anti-interferenza e supporto per il controllo PID in configurazioni tipiche di controllo MCU + driver del motore.
Caratteristiche principali
- Misurazione della velocità con sensore Hall ad alta precisione; l'uscita dell'encoder di fase AB supporta il giudizio della direzione (Avanti/Ritorno).
- Encoder Hall ad alta precisione a 13 linee; il segnale dell'encoder è descritto come shaping pull-up integrato, consentendo la lettura diretta da parte della MCU.
- Struttura a albero singolo in metallo / albero in metallo; design del motore a spazzole in rame noto per il basso rumore e il basso calore.
- Si consiglia di utilizzare con un supporto per motore per l'installazione dell'auto intelligente.
- Architettura di controllo tipica: MCU (STM32 / 51 MCU / Arduino) + driver del motore (TB6612FNG, modulo L298N, ecc.) con feedback di velocità (segnale a impulsi).
Specifiche
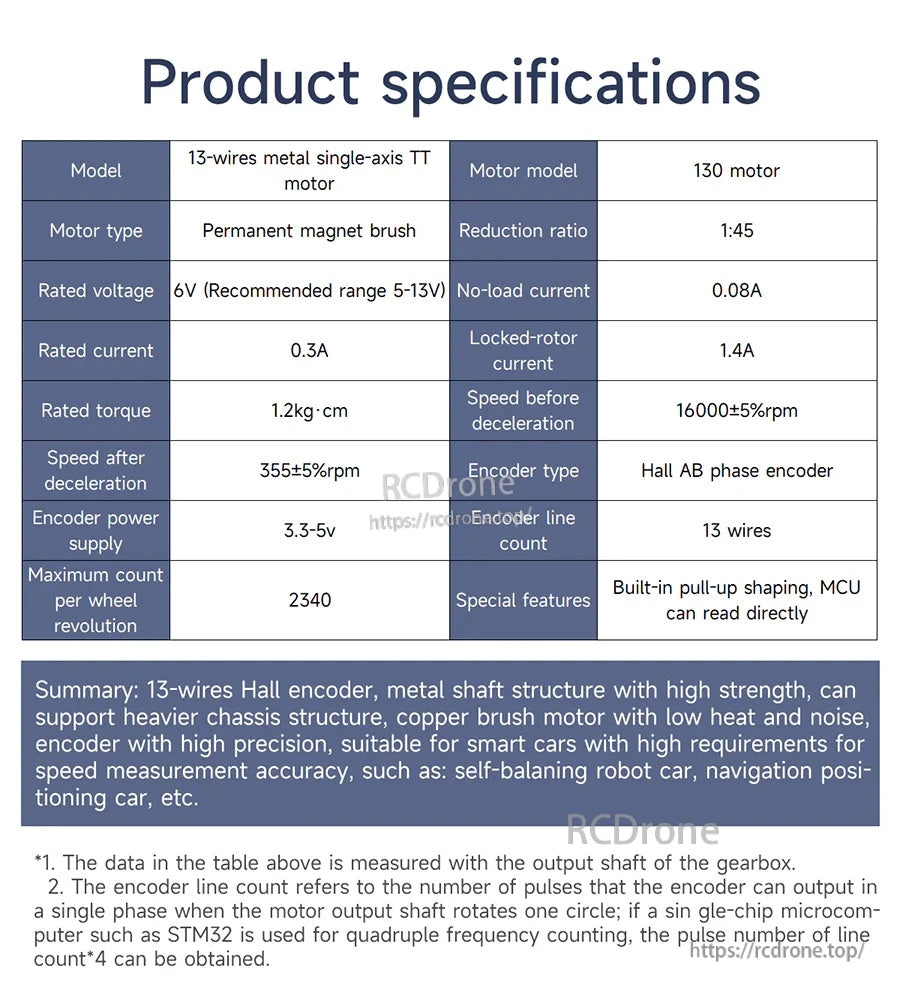
| Modello | Motore TT metallico a singolo asse con 13 fili |
| Modello del motore | Motore 130 |
| Tipo di motore | Spazzola a magnete permanente |
| Tensione nominale | 6V (intervallo raccomandato 5-13V) |
| Corrente nominale | 0.3A |
| Corrente a vuoto | 0.08A |
| Corrente di rotore bloccato | 1.4A |
| Rapporto di riduzione | 1:45 |
| Momento torcentale nominale | 1.2kg·cm |
| Velocità prima della decelerazione | 16000 +5% rpm |
| Velocità dopo la decelerazione | 355 rpm ± 5% |
| Potenza nominale | 1.8W |
| Albero di uscita | Diametro 5mm albero piatto doppio |
| Tipo di encoder | Encoder Hall di fase AB (encoder Hall incrementale di fase AB) |
| Alimentazione dell'encoder | 3.3-5v |
| Conteggio linee dell'encoder | 13 |
| Conteggio massimo per rivoluzione della ruota | 2340 |
| Larghezza di installazione del motore | 35.99mm |
| Larghezza del telaio applicabile | La larghezza del telaio può essere inferiore a 15cm |
| Peso del motore singolo | 41.3g |
| Caratteristiche speciali | Forma di sollevamento integrata, l'MCU può leggere direttamente |
Applicazioni
- Auto con ruote Mecanum
- Auto bilanciata
- Auto per navigazione e posizionamento
- Progetti di auto intelligenti con requisiti di competizione
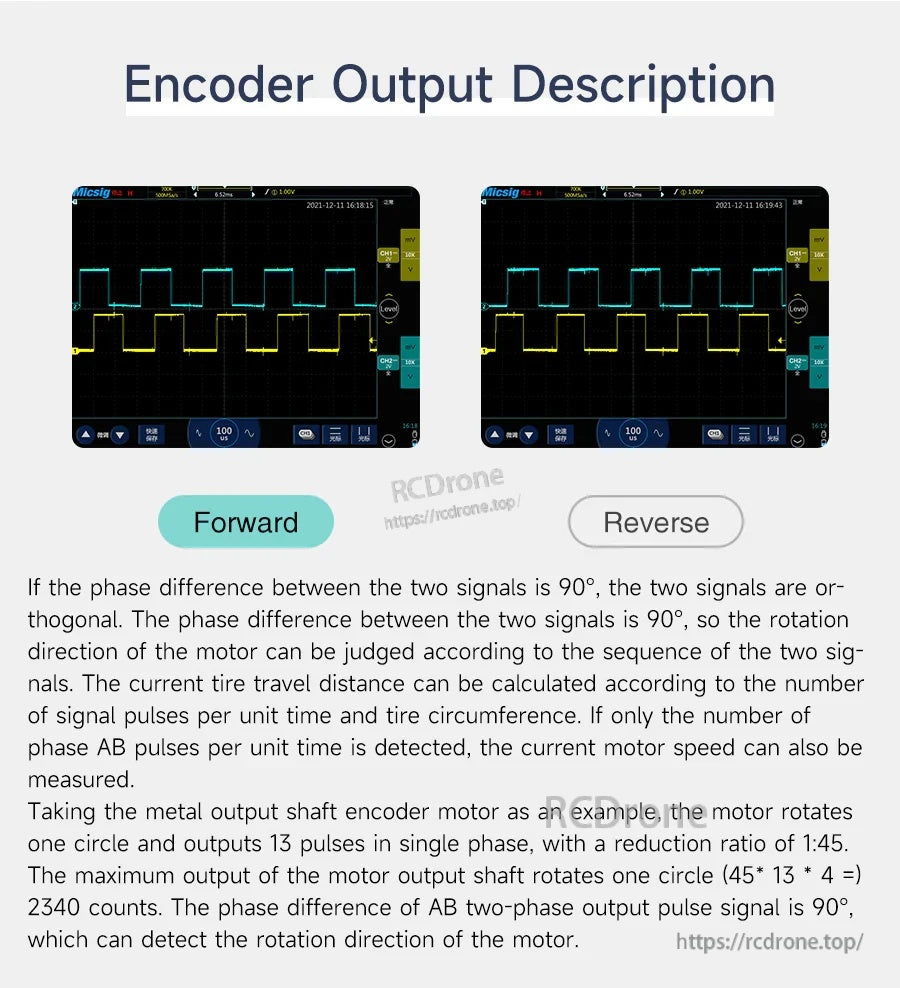
Note sull'uscita dell'encoder
- I segnali a impulsi a due fasi AB hanno una differenza di fase di 90°; la direzione di rotazione può essere giudicata dalla sequenza del segnale.
- La distanza può essere calcolata dal conteggio degli impulsi e dalla circonferenza della gomma; la velocità può essere misurata dagli impulsi AB per unità di tempo.
- Esempio fornito: con rapporto di riduzione 1:45 e 13 impulsi per singola fase per rotazione del motore, il conteggio della frequenza quadrupla produce 45 × 13 × 4 = 2340 conteggi per rivoluzione della ruota.
Per documentazione, codice del driver e materiali di supporto per tutorial, contattare https://rcdrone.top/ o inviare un'email a [email protected].
Dettagli

Aggiungi feedback di velocità a circuito chiuso alle auto smart fai-da-te con un motore a ingranaggi TT che include un encoder Hall a fase AB per il controllo PID.

Scegli il giusto rapporto di riduzione e la tensione per il tuo telaio in base al grafico di confronto dei motori.

Il modello 6V 1:45 mira a una velocità stabile e controllabile di circa 355 rpm per la taratura PID e il movimento preciso.

Altre varianti di tensione e rapporto di trasmissione sono elencate per progetti che necessitano di diverse gamme di velocità o coppia.
Formati di motore alternativi sono disponibili per costruzioni compatte e diverse dimensioni dell'albero.

Un encoder Hall a 13 linee fornisce impulsi a due fasi AB per la misurazione della velocità e la rilevazione della direzione.
Progettato per prestazioni di velocità stabili e feedback affidabile in ambienti rumorosi di auto robot.
Specifiche chiave a colpo d'occhio: funzionamento a 6V, riduttore 1:45, albero doppio piatto da 5 mm e fino a 2340 conteggi per rivoluzione della ruota (decodifica quad).
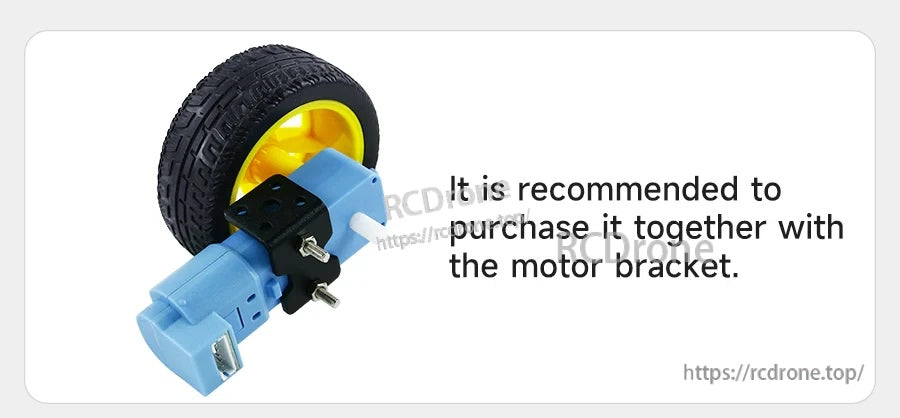
Abbinare il motore a un supporto semplifica il montaggio del telaio e migliora l'allineamento per le costruzioni del sistema di trasmissione.

Gomme in gomma da 65 mm possono essere utilizzate per costruire un set di ruote motrici pratiche per piattaforme automobilistiche.

Le ruote Mecanum sono una combinazione comune per il feedback dell'encoder quando si costruiscono auto robotiche ologonali.

Adatto per progetti di auto intelligenti come piattaforme mecanum, auto in equilibrio e costruzioni di navigazione/posizionamento.
Segnali di fase AB con una differenza di fase di 90° supportano il giudizio della direzione e il calcolo della velocità dai conteggi dei impulsi.
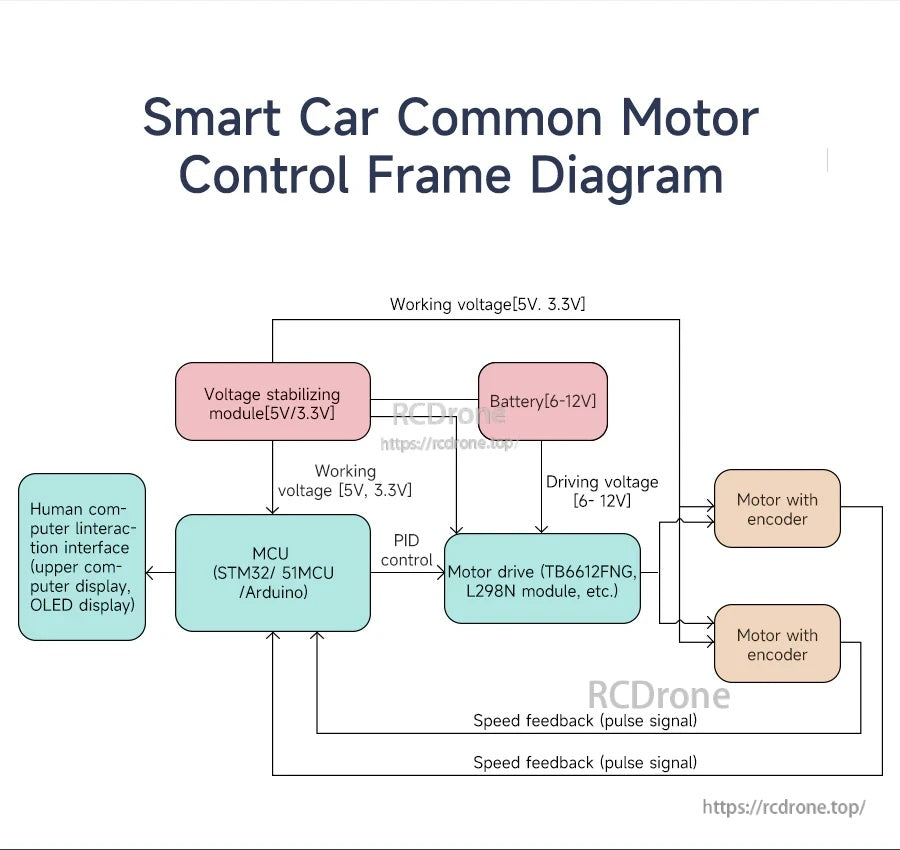
Una configurazione tipica utilizza un MCU con un driver per motore per chiudere il circuito utilizzando il feedback dei impulsi dell'encoder.

Opzioni di driver per motore e scheda di espansione compatibili sono disponibili per il controllo basato su encoder.

Un modulo driver per encoder a 4 canali può aiutare ad espandere le costruzioni di telai multi-motore.
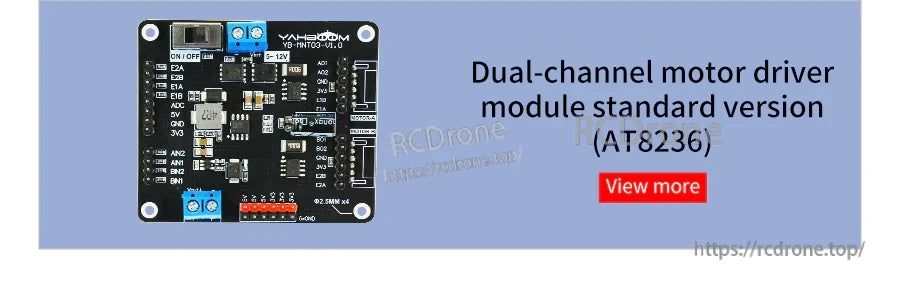
Un modulo driver a doppio canale supporta i comuni sistemi di trasmissione per auto intelligenti a due motori con feedback dell'encoder.

Risorse di tutorial e codice di esempio sono fornite per aiutare a integrare il feedback dell'encoder nel tuo programma di controllo.
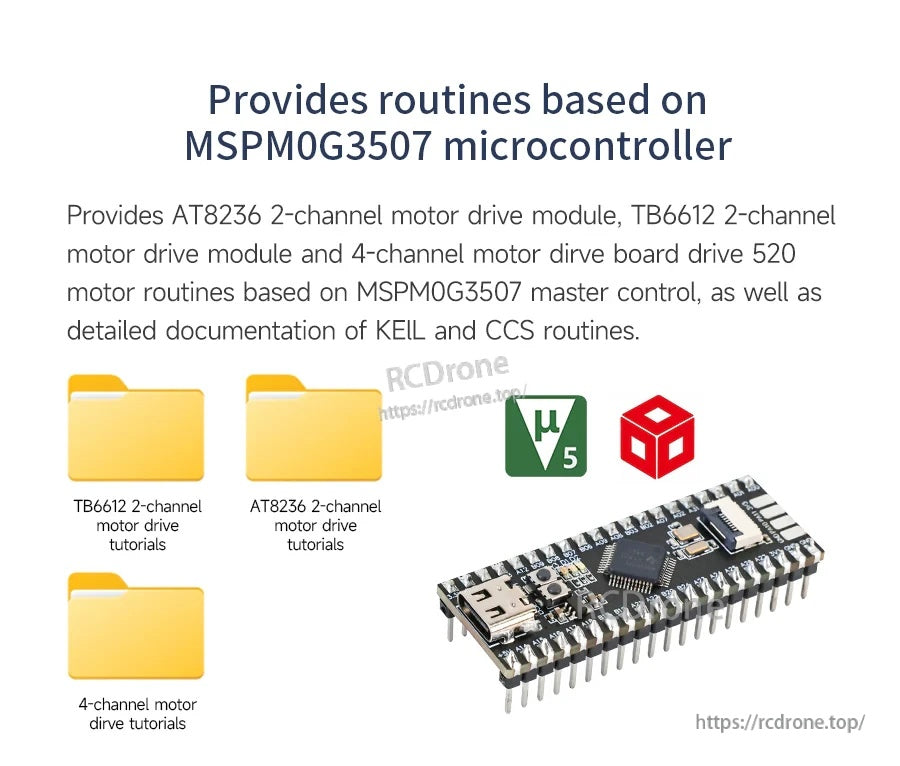
Le routine e la documentazione basate su MSPM0G3507 supportano i comuni moduli driver per motori, con link per progetti KEIL e CCS.
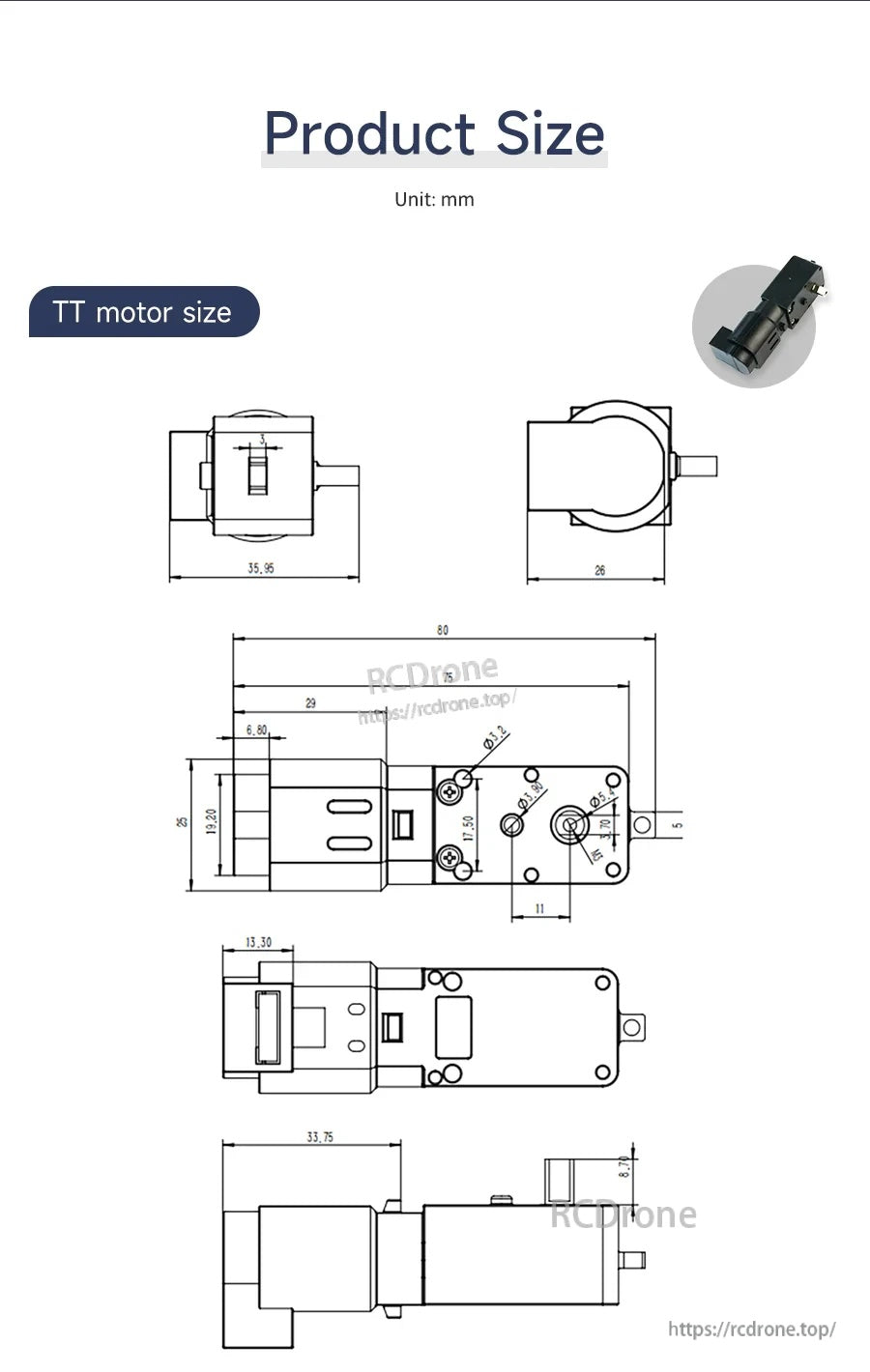
Il profilo dimensionato in mm del motore a ingranaggi DC TT ti aiuta a verificare l'adattamento, la posizione dell'albero e la distanza dei fori di montaggio per un telaio di auto intelligente.
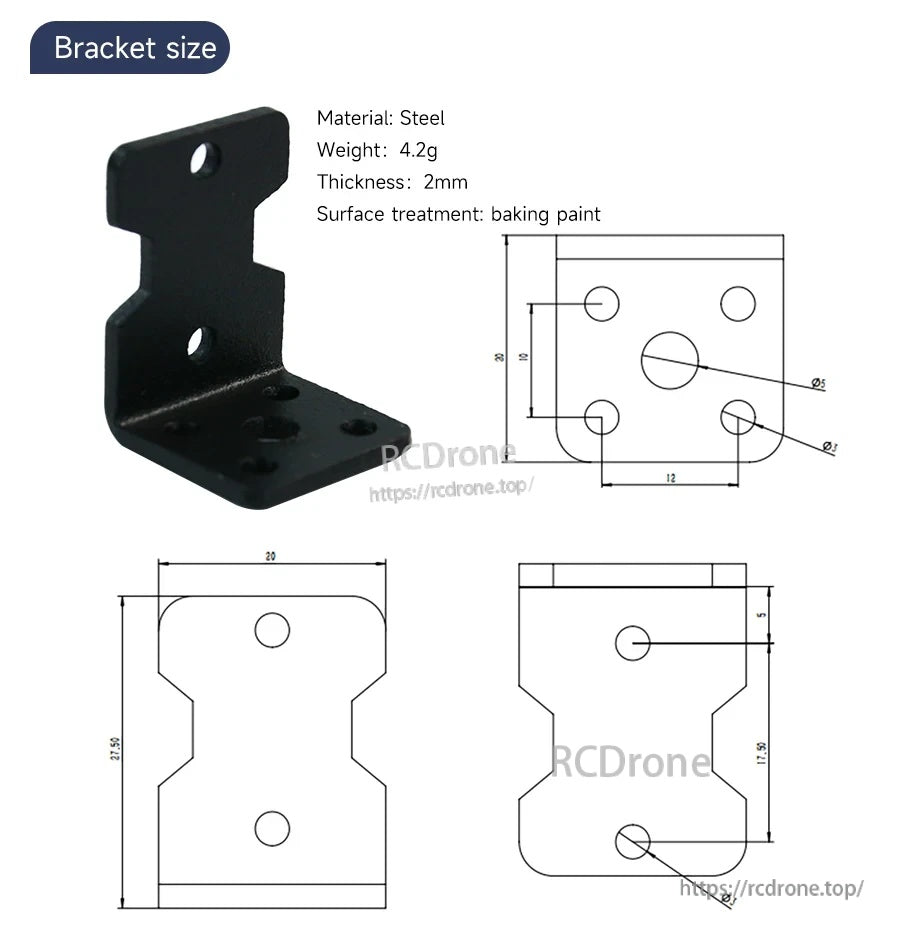
Il supporto di montaggio in acciaio a forma di L include una base con più fori e uno spessore di 2 mm per un montaggio hardware robusto.
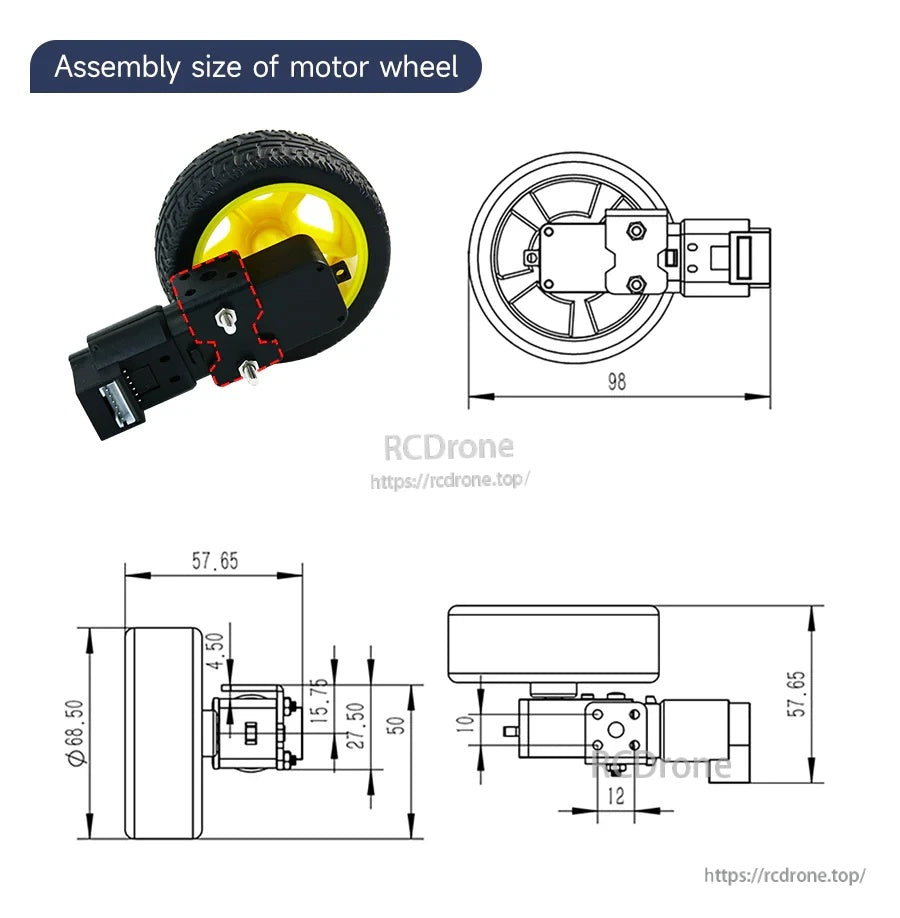
Il motore a ingranaggi DC TT e l'assemblaggio della ruota includono un disegno dimensionale dettagliato per aiutare a pianificare il montaggio e il passaggio del telaio.
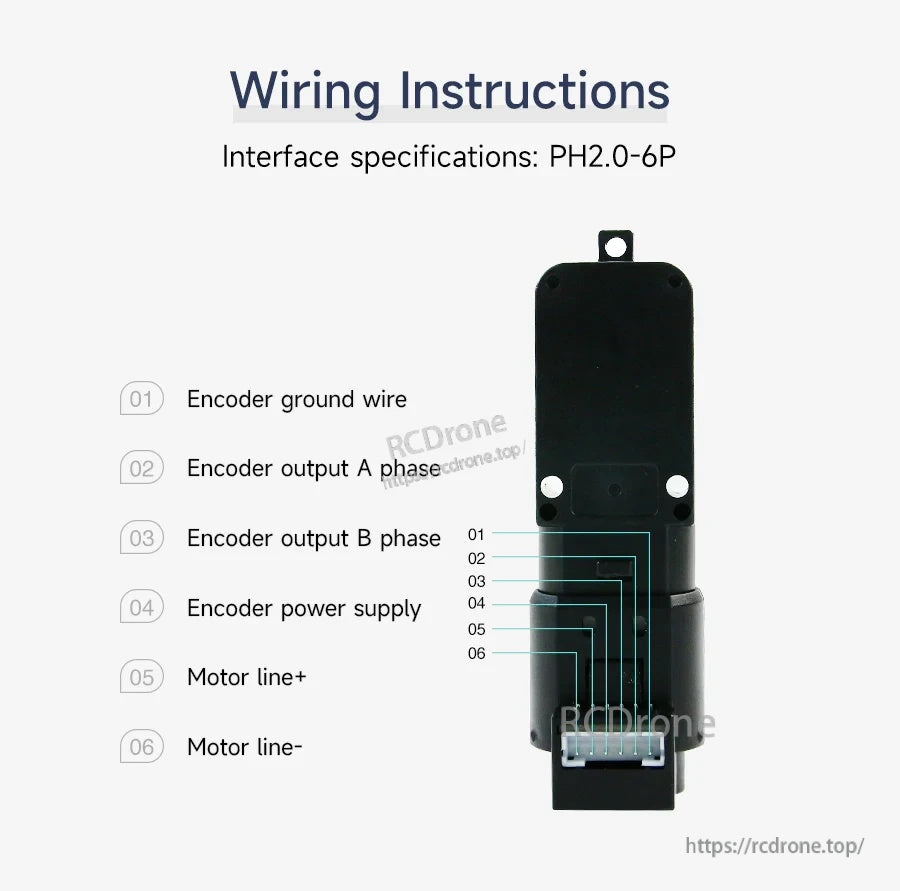
Il PH2.0-6P connettore pinout etichette encoder terra, uscite A/B, alimentazione e linee motore +/− per un cablaggio semplice.

Il motore a ingranaggi TT con encoder hall viene fornito con un supporto di montaggio e una ruota per un'assemblaggio rapido di auto smart fai-da-te.
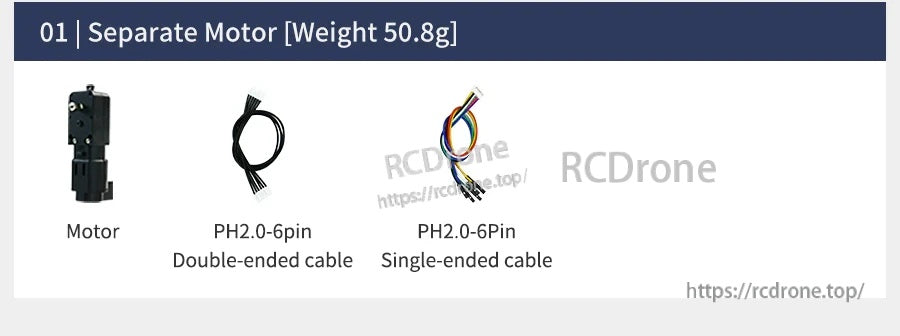
Il motore a ingranaggi DC TT viene fornito con cavi PH2.0 a 6 pin a singolo e doppio terminale per un cablaggio semplice dell'encoder.
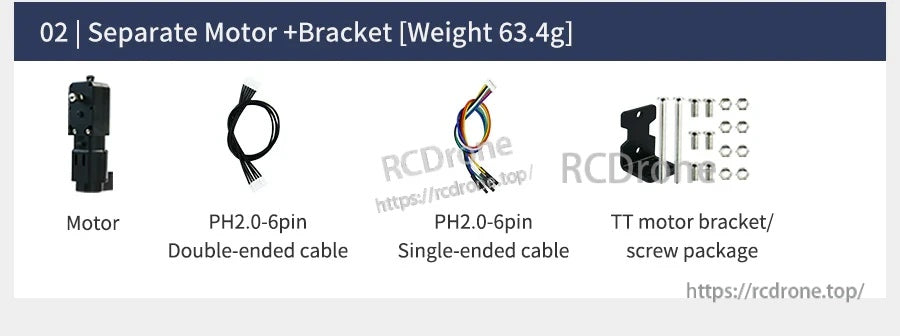
Il kit motore a ingranaggi DC TT include cavi PH2.0 a 6 pin a doppio e singolo terminale, oltre a un supporto per motore e hardware a vite per il montaggio.

Il kit motore a ingranaggi DC TT include il motore, supporto di montaggio con viti, pneumatico della ruota e cavi PH2.0 a 6 pin per un'assemblaggio rapido di auto smart fai-da-te.
Related Collections






