Sensore Lidar YDLIDAR X3 Pro, Raggio TOF 8m, ROS1/ROS2, UART, Scansione 360°, 4000/s
Sensore Lidar YDLIDAR X3 Pro, Raggio TOF 8m, ROS1/ROS2, UART, Scansione 360°, 4000/s
Yahboom
Impossibile caricare la disponibilità di ritiro
Panoramica
Il YDLIDAR X3 Pro è un sensore Lidar a 360° progettato per la mappatura e navigazione robotica ROS. Utilizza tecnologia di misurazione trigonometric (triangolazione laser) e comunicazione seriale asincrona standard (UART), fornendo un raggio di misurazione di 8m per la maggior parte degli scenari d'uso interni. Il modulo include un driver per motore con regolazione della velocità del motore e supporta l'aggiustamento automatico della frequenza di scansione.
Caratteristiche principali
- Supporta ROS1 e ROS2; compatibile con sistemi ROS e fornisce SDK e supporto tecnico.
- Frequenza di campionamento: 4000 volte/s (4000 campioni al secondo).
- Frequenza di scansione: 5Hz~10Hz regolabile (può regolare autonomamente tramite la regolazione della velocità del motore).
- Scansione laser omni-direzionale a 360° (il nucleo di misurazione ruota in senso orario).
- Resistenza alla luce ambientale: 40Klux (interno/esterno).
- Fornisce software per PC Windows.
- Supporta piattaforme di sviluppo tra cui Raspberry Pi, serie RDK, schede NVIDIA Jetson e PC/IPC.
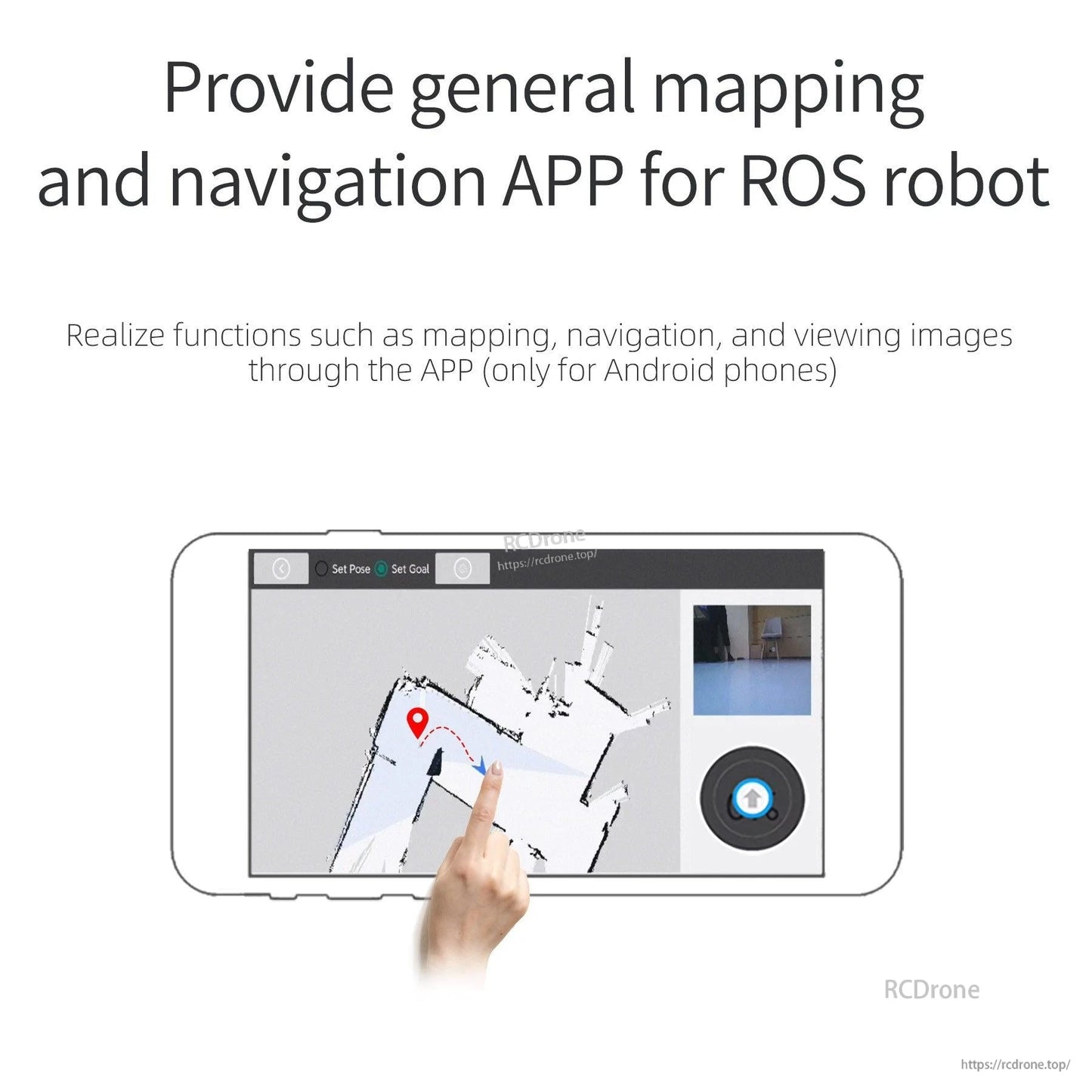
- Fornisce un'app generale di mappatura e navigazione per robot ROS (solo telefoni Android), con funzioni come mappatura, navigazione e visualizzazione di immagini tramite l'app.
Specifiche
| Modello | YDLIDAR X3 Pro |
| Raggio di misurazione | 8m |
| Intervallo di misurazione (Min) | 0.12m |
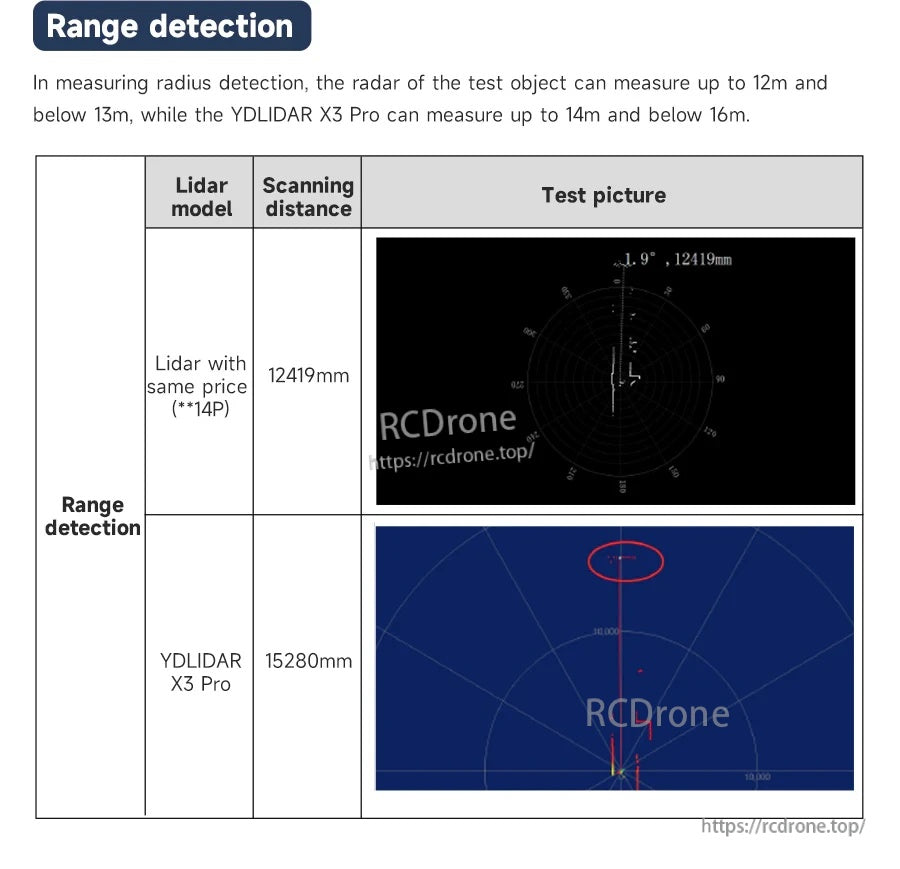
| Test di sovraccarico | Fino a 14m fino a 16m |
| Risoluzione angolare | 0.6° (5Hz) |
| Frequenza di scansione | 5Hz~10Hz Regolabile |
| Frequenza di campionamento | 4000 volte/s |
| Intensità della luce ambientale | 40KLux (Esterno) |
| Angolo di scansione | 360° |
| Principio di misurazione | Misurazione trigonometrica |
| Interfaccia di comunicazione | Porta seriale asincrona standard (UART) |
| Dimensioni complessive | 95*68.9*40.5mm |
| Peso | 135g |
| Piastra adattatore porta seriale | Con custodia |
| Supporto Windows | Fornire software per PC Windows |
| Supporto ROS | ROS1 e ROS2 |
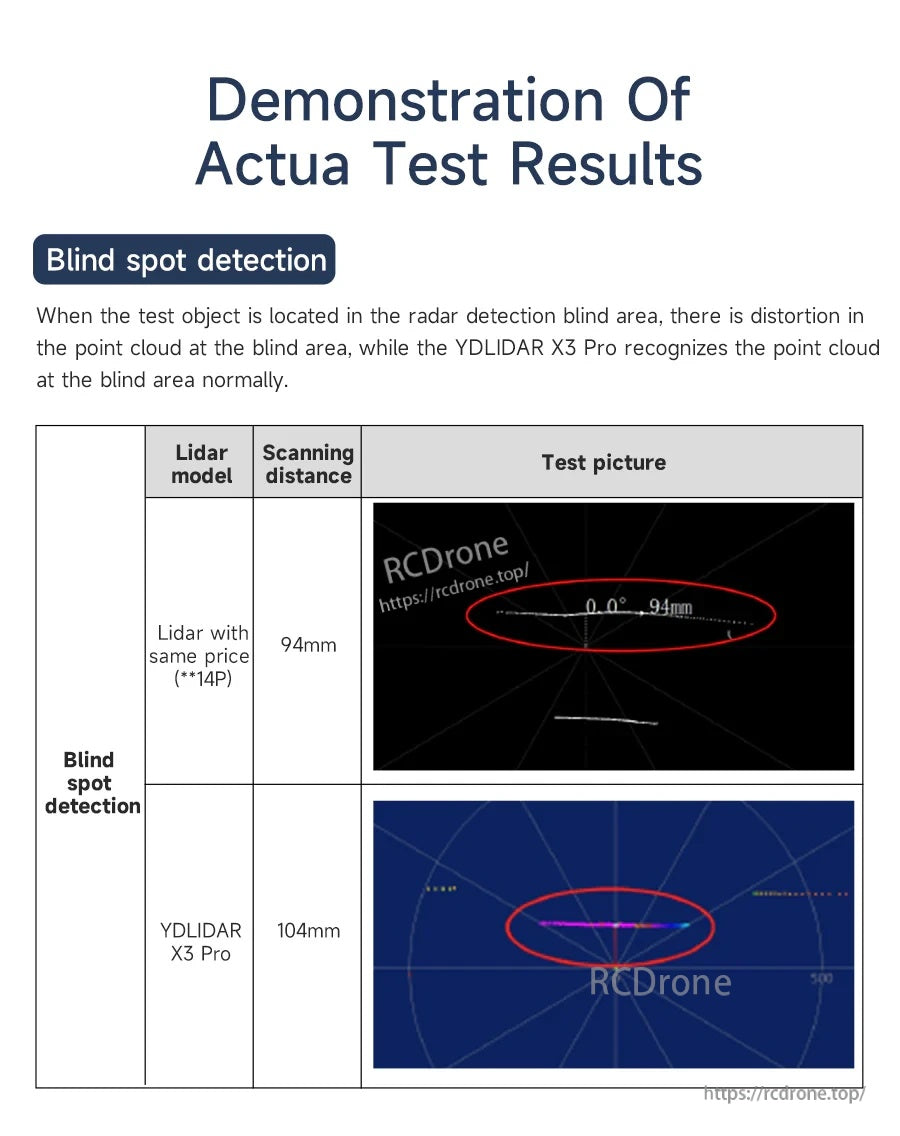
| Misurazione del punto cieco | Il riconoscimento della nuvola di punti è normale |
| Misurazione di precisione a 6m | Bassa ampiezza di jitter nella nuvola di punti |
Applicazioni
- Mappatura e navigazione indoor per robot mobili
- Visualizzazione ROS e flussi di lavoro SLAM (rviz, mappatura e navigazione)
- Evitamento ostacoli e progetti di posizionamento/navigazione sincrona
- Robot educativi ROS e sviluppo hardware open source
- Mappatura UAV e evitamento ostacoli (come sensore di distanza)
Software & Tutorial
- Materiale didattico relativo a ROS1/ROS2 (include metodi di test lidar e metodi di test di mappatura)
- File di avvio preconfigurato per una configurazione più rapida nell'ambiente ROS
- Codice sorgente open source e un'app solo per Android per mappatura/navigazione e visualizzazione delle immagini
- Software per PC Windows
Per assistenza nella selezione del prodotto o supporto post-vendita, contattare [email protected] or visita https://rcdrone.top/ .
Note
- La rilevazione delle aree cieche e la rilevazione di precisione degli oggetti target sono pannelli bianchi con il 80% di riflettività.
- Gli oggetti target per la rilevazione del raggio sono pareti bianche con il 92% di riflettività.
Dettagli

Il sensore Lidar YDLIDAR X3 Pro offre scansione a 360° per mappatura e navigazione ROS, con rotazione regolabile da 5 a 10Hz.
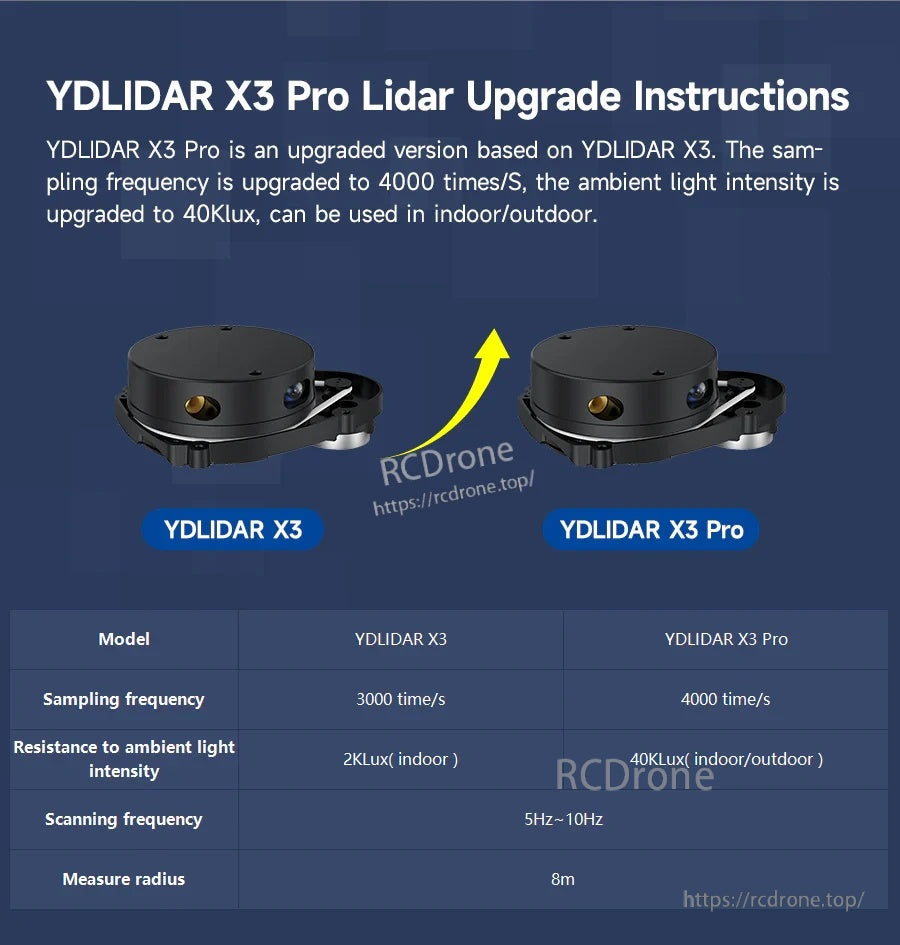
Rispetto al YDLIDAR X3, la versione Pro aumenta il campionamento a 4000 volte/s e migliora la resistenza alla luce ambientale a 40Klux.
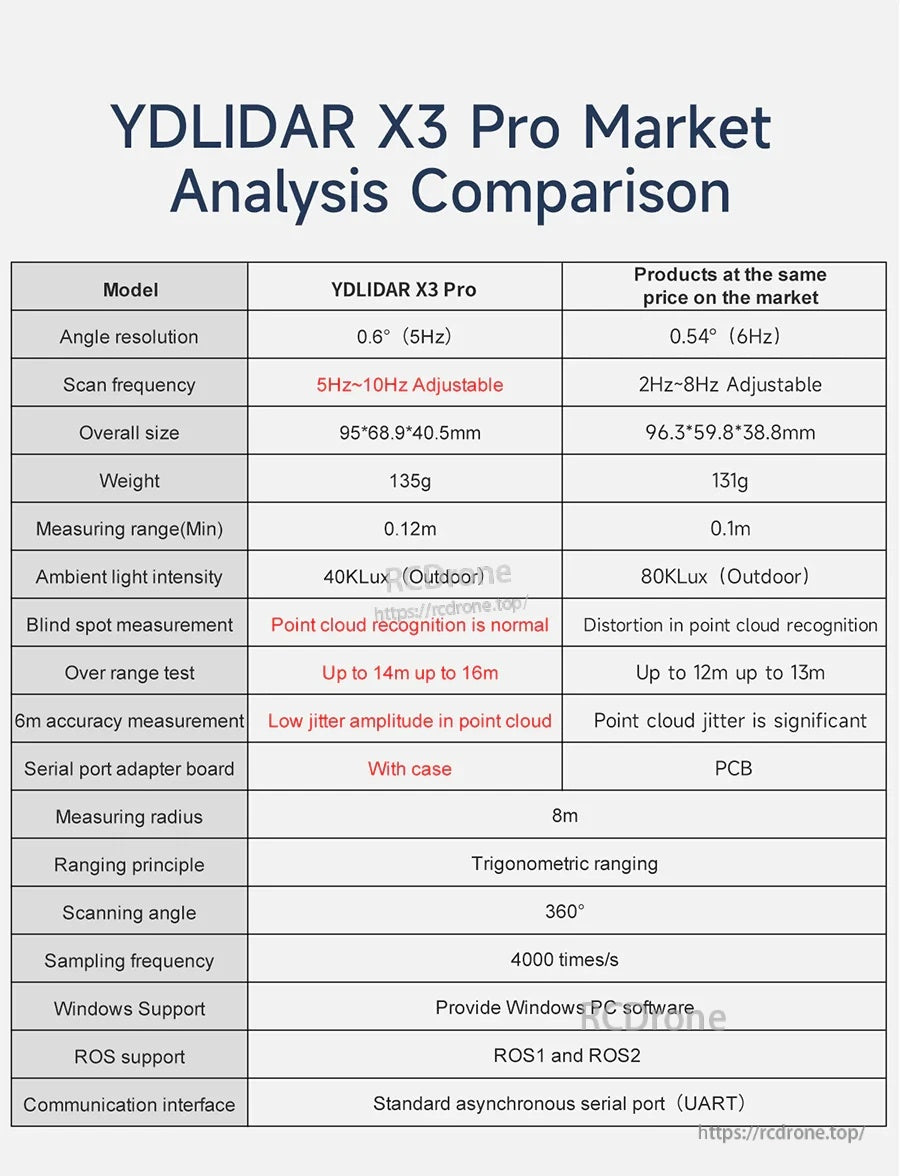
Un confronto focalizzato sulle specifiche evidenzia i parametri del X3 Pro come risoluzione angolare, raggio di misurazione e compatibilità ROS/UART.
I risultati della rilevazione della distanza illustrano ritorni a lungo raggio estesi in test controllati.
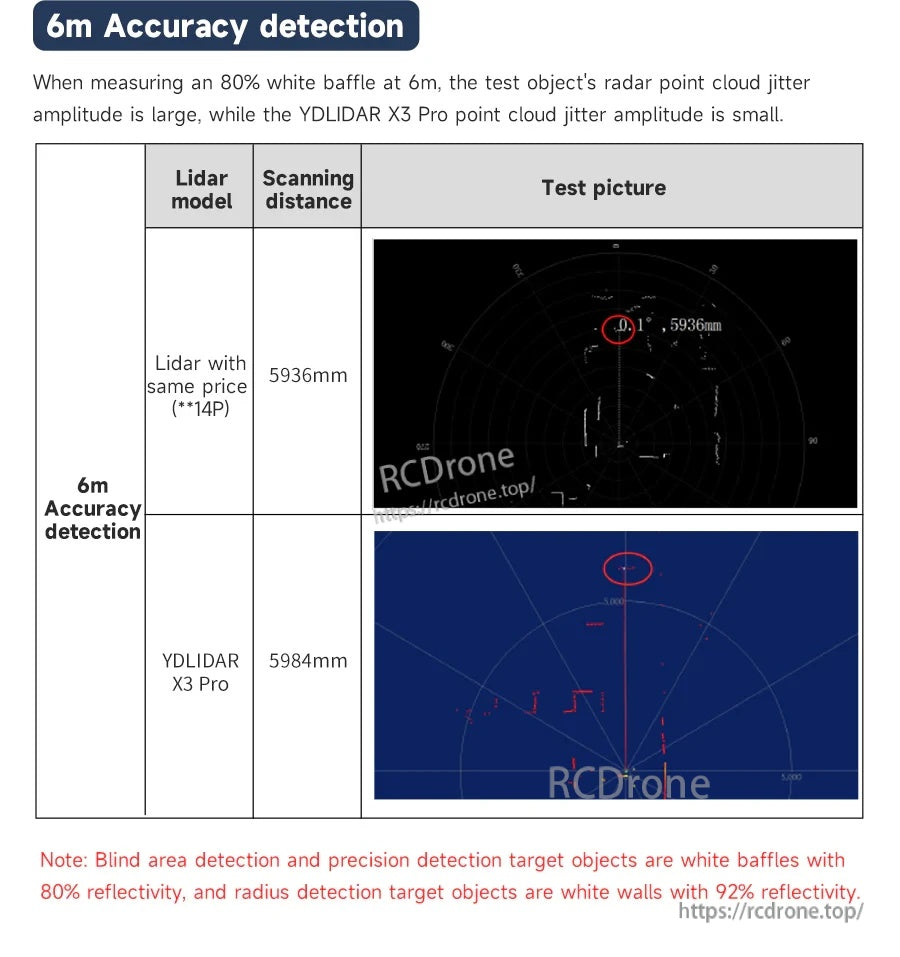
A 6m, un jitter della nuvola di punti più basso aiuta a mantenere le mappe stabili durante la navigazione e l'evitamento degli ostacoli.

La misurazione della distanza tramite triangolazione laser è utilizzata per misurare la distanza e costruire una mappa di contorno 2D dell'ambiente.
Un raggio di misurazione di 8m si adatta alla maggior parte delle implementazioni di mappatura e navigazione indoor.

La frequenza di scansione può essere regolata da 5Hz a 10Hz con regolazione della velocità del motore integrata.

Un tasso di 4000 campioni al secondo supporta la cattura di dati di mappatura reattivi.

La scansione omni-direzionale a 360° completa aiuta a rilevare l'ambiente per la navigazione e la mappatura dei contorni.

La compatibilità con ROS1 e ROS2 è supportata con accesso SDK e assistenza tecnica per l'integrazione.

Funziona con piattaforme robotiche comuni tra cui Raspberry Pi, NVIDIA Jetson, schede della serie RDK e PC/IPC.
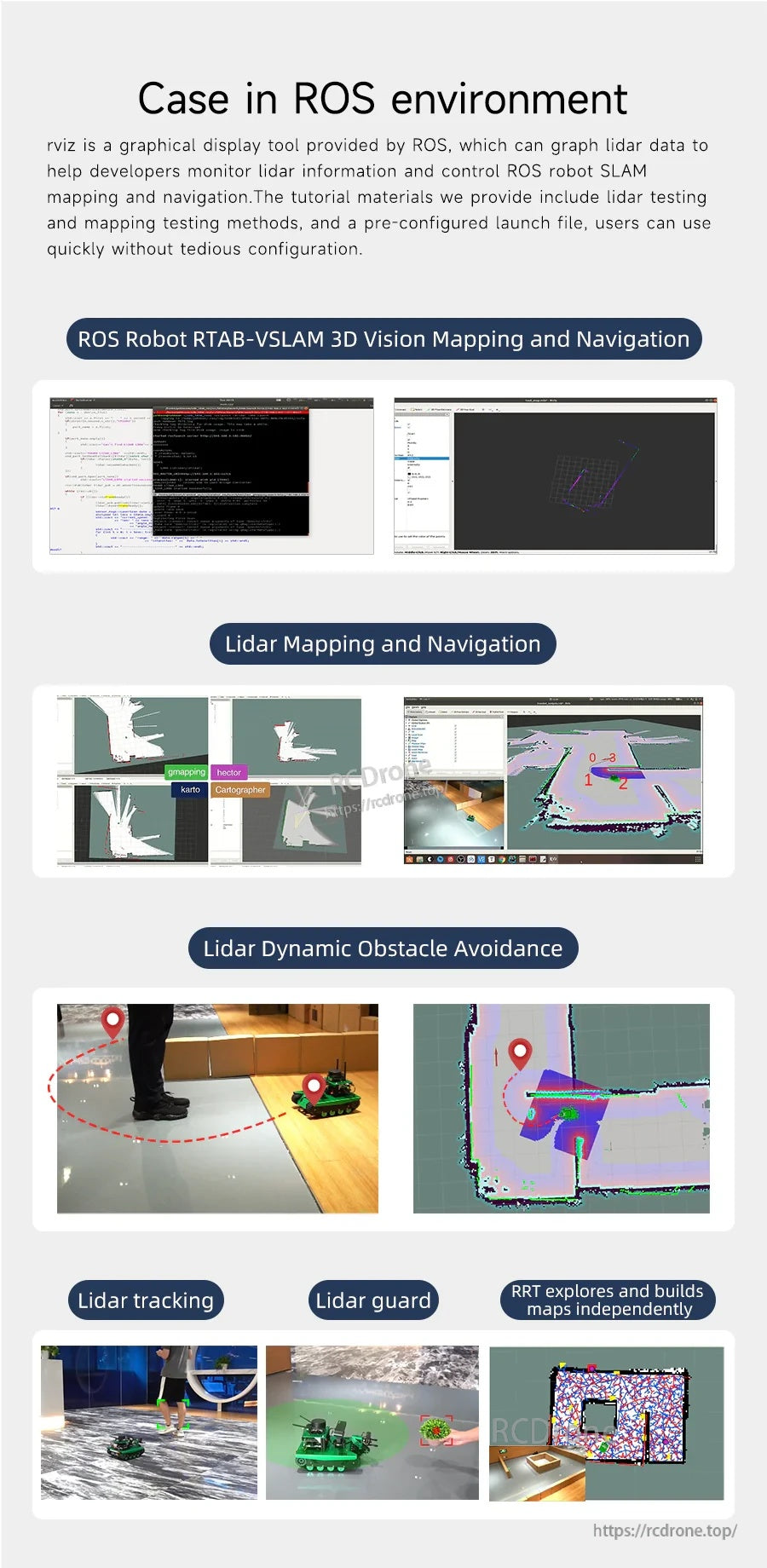
I flussi di lavoro tipici di ROS includono visualizzazione rviz, stack di mappatura/navigazione e evitamento dinamico degli ostacoli.
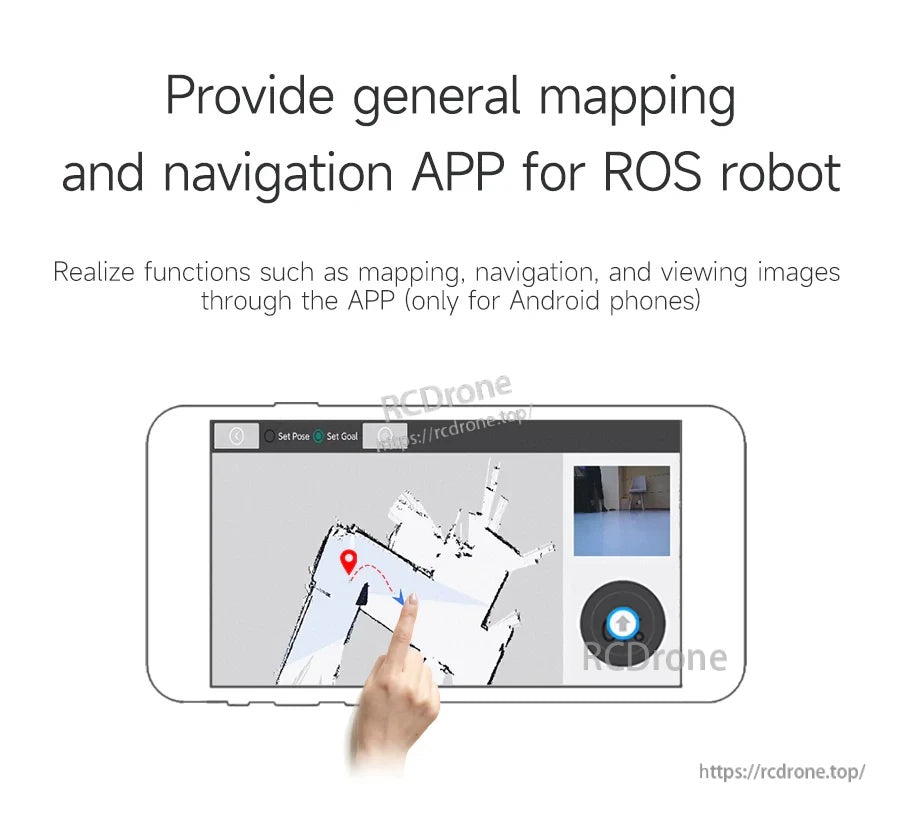
È disponibile un'app solo per Android per mappatura generale, navigazione e visualizzazione di immagini su un robot ROS.
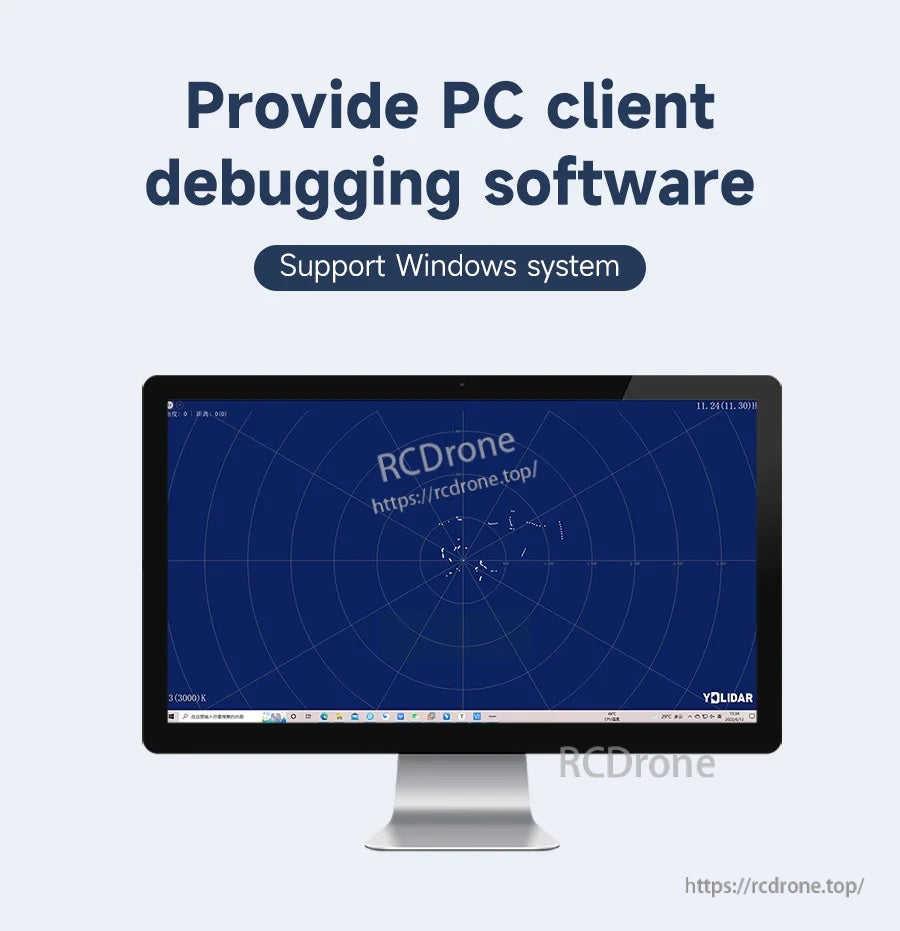
Il software per PC Windows è fornito per debugging, visualizzazione e test di base del lidar.

Adatto per robot educativi, progetti di robotica open-source, misurazione UAV e compiti di scansione ambientale.

La connessione USB consente un rapido setup plug-and-play, e il corpo compatto si adatta a costruzioni di robot con spazio limitato.
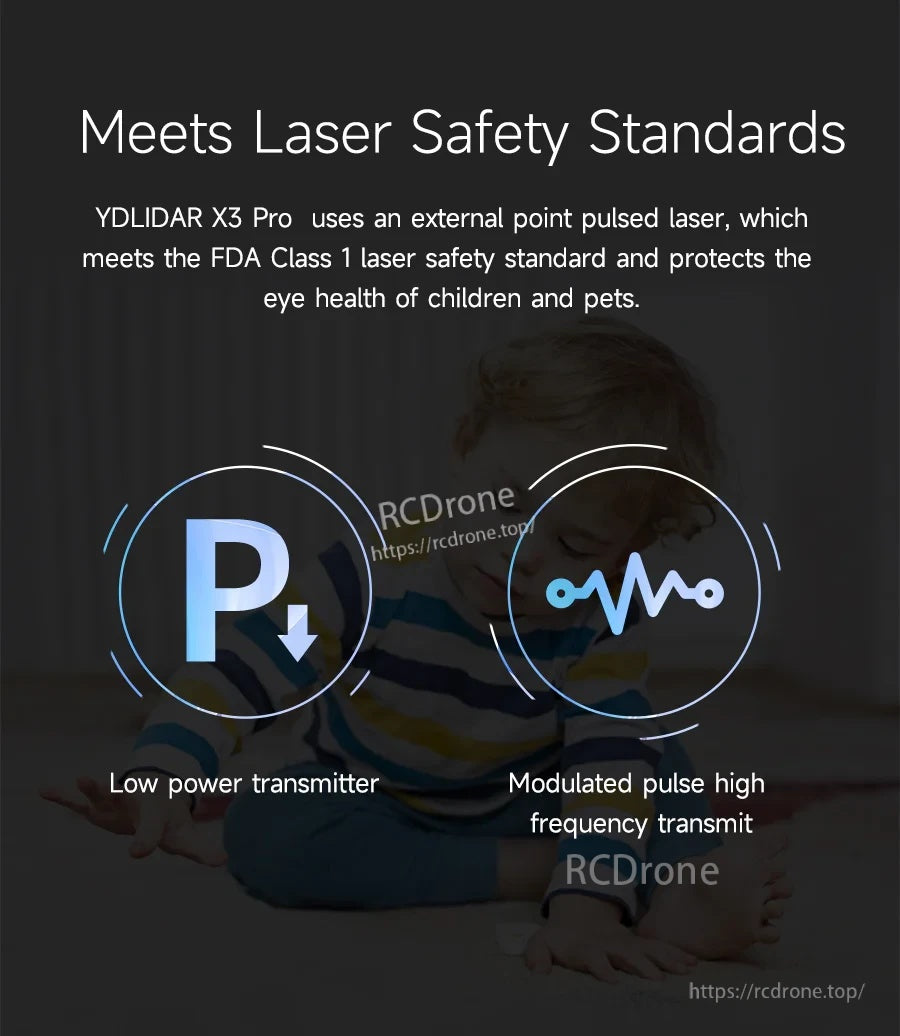
YDLIDAR X3 Pro utilizza un laser a impulsi esterno che soddisfa lo standard di sicurezza laser di Classe 1 della FDA.
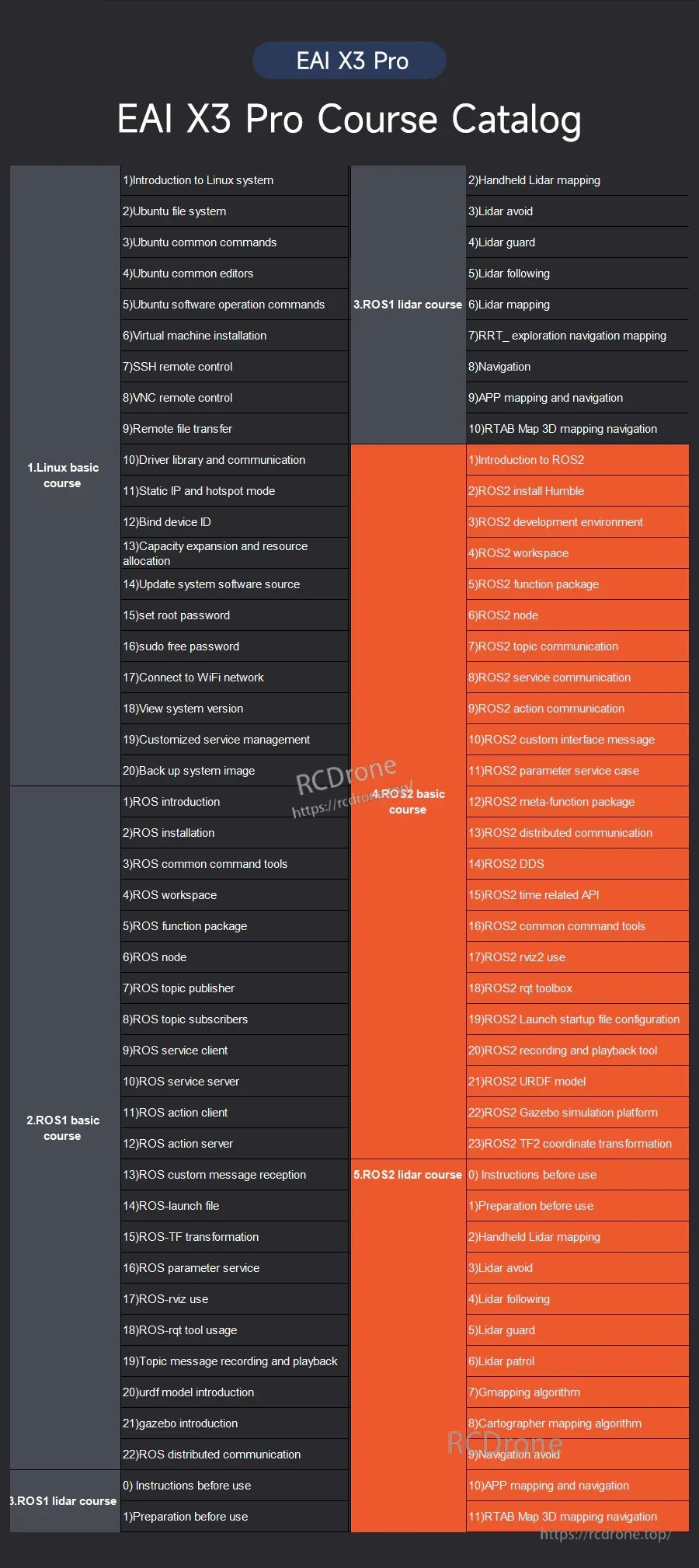
Il catalogo dei corsi EAI X3 Pro delinea moduli di apprendimento per mappatura, SLAM, navigazione e sviluppo ROS2.

Il kit YDLIDAR X3 Pro include il sensore lidar, una scheda adattatore per porta seriale e cavi Type-C e aggiuntivi per collegarsi al tuo sistema.
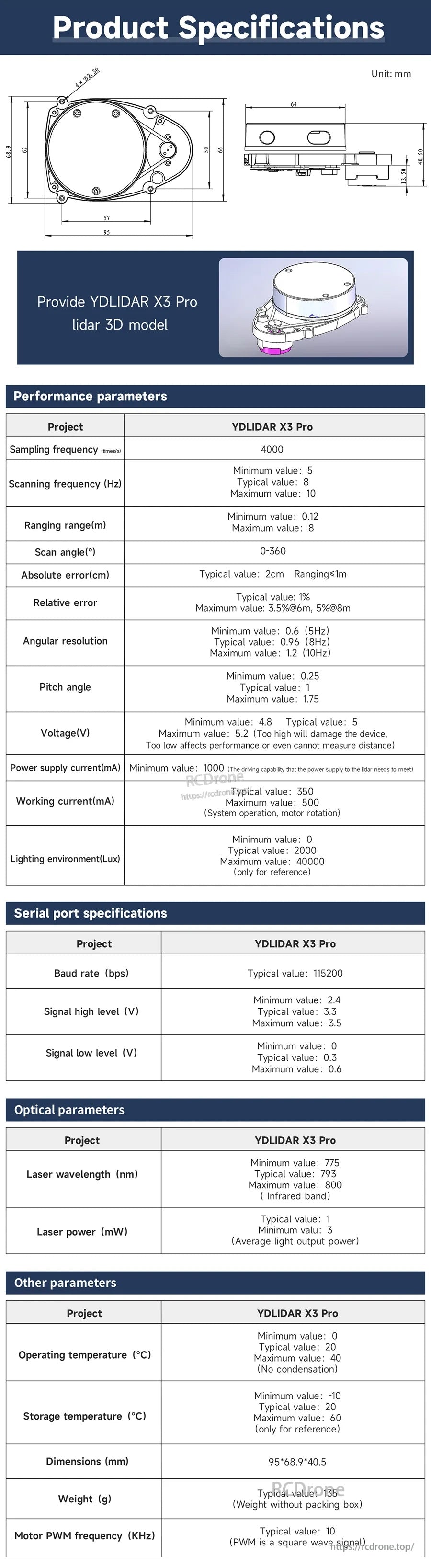
Le specifiche e i disegni meccanici del YDLIDAR X3 Pro aiutano a pianificare lo spazio di montaggio e l'integrazione nel tuo setup robotico.
Related Collections