






ZeroOne X6 Pro Autopilota Controller di Volo FMU v6X STM32H753, Triplo IMU, Ethernet 100M, PWM 3.3V/5V
ZeroOne X6 Pro Autopilota Controller di Volo FMU v6X STM32H753, Triplo IMU, Ethernet 100M, PWM 3.3V/5V
ZeroOne
Impossibile caricare la disponibilità di ritiro
Panoramica
Il ZeroOne X6 Pro è un controller di volo autopilotato basato sull'architettura open-source FMU v6X (Standard di connettore Pixhawk DS-009), progettato per ambienti ad alta vibrazione e supporta i firmware ArduPilot e PX4. Integra sensori di grado industriale, assorbimento degli urti integrato, ridondanza tripla IMU, compensazione della temperatura IMU e un'interfaccia Ethernet da 100 Mbit per una connettività ampliata.
Caratteristiche principali
- Standard hardware open-source FMU v6X (compatibilità con lo standard del connettore Pixhawk DS-009 mostrata)
- Processore: STM32H753; processore di crittografia/hash integrato (come dichiarato); frequenza principale aumentata a 480MHz; 2M FLASH; 1M RAM
- Sensori di grado industriale con alta resistenza alle vibrazioni, basso rumore e bassa deriva termica (come dichiarato)
- Ridondanza tripla IMU e architettura di ridondanza multi-sensore (come dichiarato)
- Compensazione della temperatura IMU (potenza di riscaldamento aumentata del 100%, come dichiarato)
- Capacità di pilotaggio PWM con 3.3V/5V supporto per il livello/tensione PWM
- Caratteristiche di protezione: protezione da sovracorrente/sovratensione; protezione da limitazione della corrente del ricevitore; protezione ESD per le porte; filtro EMI per l'alimentazione
- Interfaccia Ethernet 100 Mbit (ETH x1) per collegare computer/periferiche esterne (le piattaforme di esempio includono Raspberry Pi e kit di sviluppo della serie Nvidia Jetson)
- Supporto DroneCAN tramite interfacce di alimentazione (2 interfacce di alimentazione DroneCAN elencate)
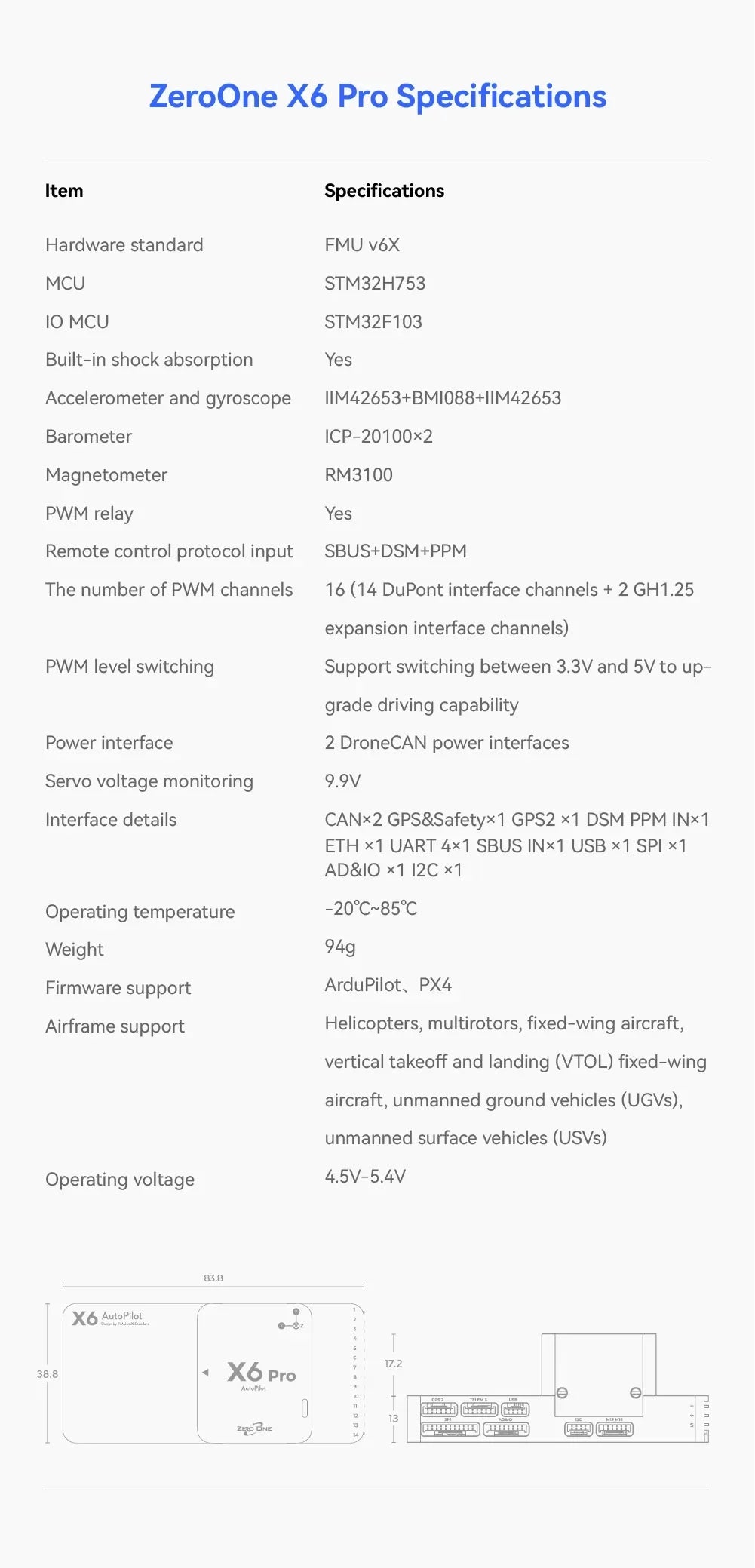
Specifiche
| Standard hardware | FMU v6X |
| MCU | STM32H753 |
| IO MCU | STM32F103 |
| Frequenza CPU (come indicato) | 480MHz |
| Memoria (come indicato) | 1M RAM |
| Flash (come indicato) | 2M FLASH | Assorbimento degli urti incorporato | Sì |
| Accelerometro e giroscopio (scheda tecnica) | IIM42653 + BMI088 + IIM42653 |
| Giroscopio menzionato nei materiali | ICM45686 (menzionato nel testo delle caratteristiche); IIM42653 (riferito nella nota del codice ArduPilot e nella scheda tecnica) |
| Barometro | ICP-20100 x2 |
| Magnetometro | RM3100 |
| Relè PWM | Sì |
| Ingresso protocollo di controllo remoto | SBUS + DSM + PPM |
| Numero di canali PWM | 16 (14 canali interfaccia DuPont + 2 GH1.25 canali di interfaccia di espansione) |
| Commutazione del livello PWM | Supporta la commutazione tra 3.3V e 5V per migliorare la capacità di pilotaggio |
| Interfaccia di alimentazione | 2 interfacce di alimentazione DroneCAN |
| Monitoraggio della tensione del servo | 9.9V |
| Dettagli dell'interfaccia | CAN x2; GPS&Sicurezza x1; GPS2 x1; DSM PPM IN x1; ETH x1; UART 4 x1; SBUS IN x1; USB x1; SPI x1; AD&IO x1; I2C x1 |
| Temperatura di funzionamento | -20°C~85°C |
| Tensione di funzionamento | 4.5V~5.4V |
| Peso | 94g |
| Supporto firmware | ArduPilot, PX4 |
| Supporto per fusoliere | Elicotteri; multirotori; aerei a decollo e atterraggio verticale (VTOL); aerei a decollo fisso; veicoli terrestri senza pilota (UGV); veicoli di superficie senza pilota (USV) |
| Dimensioni esterne (come mostrato) | 83.8 mm; 38.8 mm; 17.2 mm; 13 mm |
Sensori di grado industriale (valori del grafico mostrati)
| Giroscopio | ||
| Intervallo (°/s) (maggiore è meglio) | Sensore X6 Pro: 4000 | ADIS16470: 2000; ICM20649: 4000; ICM20689: 2000 |
| Rumore RMS (°/s/sqrt(Hz)) (minore è meglio) | Sensore X6 Pro: 0.005 | ADIS16470: 0.008; ICM20649: 0.0175; ICM20689: 0.006 |
| Sensibilità incrociata (%) (maggiore è meglio) | Sensore X6 Pro: 1.25 | ADIS16470: 0.1; ICM20649: 2; ICM20689: 2 |
| Deriva della temperatura di sensibilità (°/s/°C) (minore è meglio) | Sensore X6 Pro: 0.005 | ADIS16470: 0.25; ICM20649: 2; ICM20689: 1.5 |
| Accelerometro | ||
| Intervallo (g) (maggiore è meglio) | Sensore X6 Pro: 32 | ADIS16470: 40; ICM20649: 30; ICM20689: 16 |
| Rumore RMS (mg) (minore è meglio) | Sensore X6 Pro: 0.7 | ADIS16470: 2.3; ICM20649: 2.85; ICM20689: 1.5 |
| Sensibilità incrociata (%) (minore è meglio) | Sensore X6 Pro: 1 | ADIS16470: 0.1; ICM20649: 2; ICM20689: 2 |
| Deriva della temperatura di sensibilità (%/°C) (minore è meglio) | Sensore X6 Pro: 0.005 | ADIS16470: 0.002; ICM20649: 0.026; ICM20689: 1 |
Applicazioni
- Elicotteri
- Multi-cottero
- Aerei a ala fissa
- Aerei a ala fissa VTOL
- UGV
- USV
Manuali
Servizio clienti: [email protected] (o visita https://rcdrone.top/).
Dettagli
Il controller di volo ZeroOne X6 Pro presenta sensori di grado industriale, alta precisione, basso rumore e forte capacità di pilotaggio PWM. Progettato per aerei a grande carico, utilizza un'architettura FMU open-source v6X con compatibilità Pixhawk.
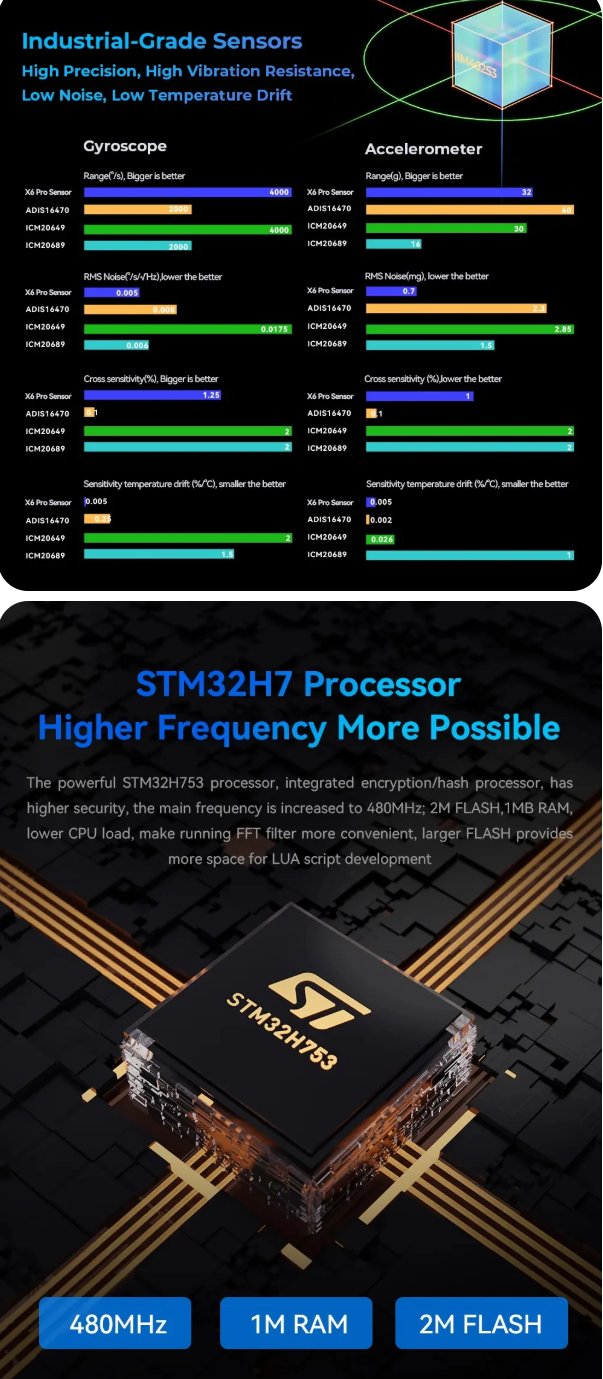
ZeroOne X6 Pro utilizza sensori di grado industriale con alta precisione, basso rumore e resistenza alle vibrazioni.Funziona con un processore STM32H753 da 480MHz con 1MB di RAM, 2MB di FLASH, sicurezza avanzata, filtraggio FFT e supporto per scripting LUA.
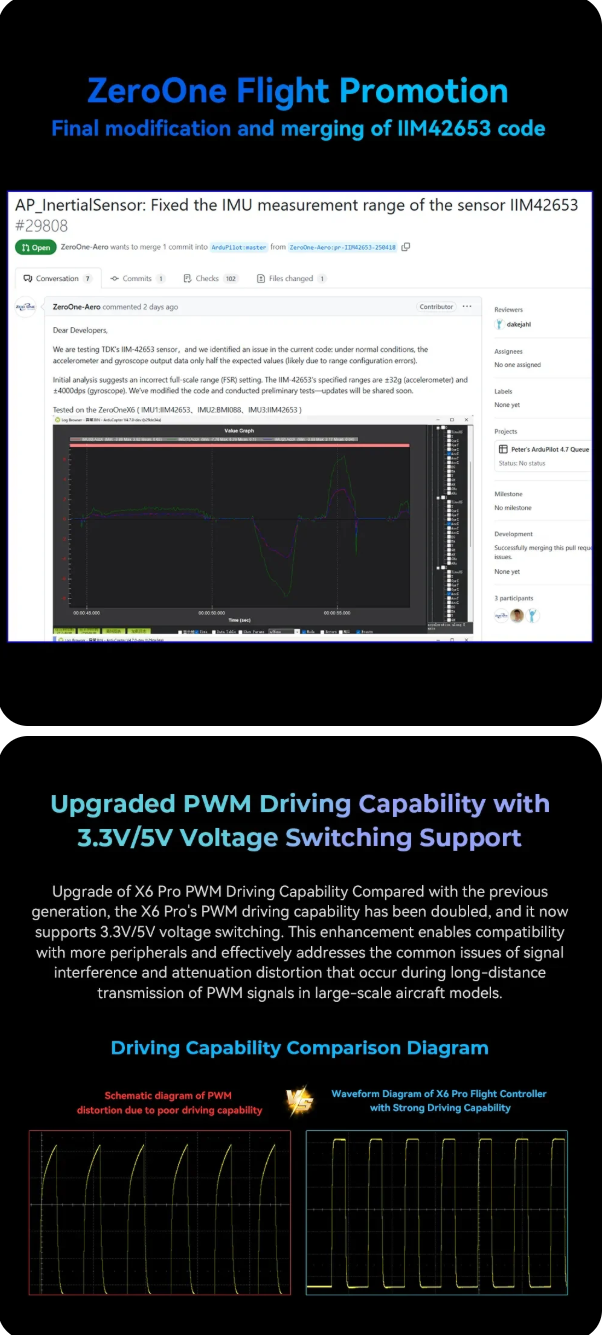
ZeroOne X6 Pro migliora la guida PWM con commutazione a 3.3V/5V, capacità di raddoppio per ridurre la distorsione del segnale. La correzione della gamma del sensore IMU per IIM42653 garantisce misurazioni accurate, migliorando la stabilità di volo e la compatibilità periferica.
ZeroOne X6 Pro offre protezione completa: sovracorrente, sovratensione, ESD e filtraggio EMI. Supportato da oltre 15 anni di esperienza UAV, il team professionale garantisce affidabilità, test automatizzati e supporto tecnico efficiente per prestazioni ottimali del drone.

ZeroOne X6 Pro ha una spugna assorbente per gli urti per stabilità, riduce vibrazioni e rumore, e include un'interfaccia Ethernet da 100M per SLAM, tracciamento visivo e funzioni avanzate del drone con integrazione Raspberry Pi o Jetson.
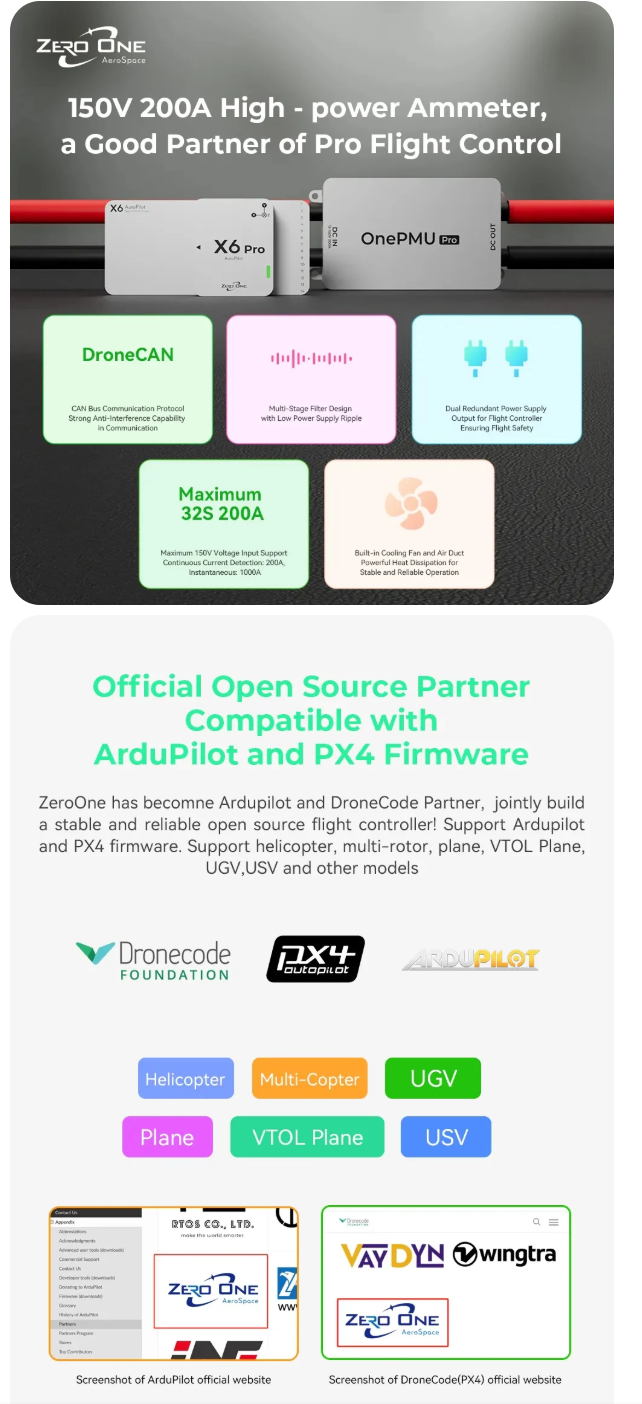
ZeroOne X6 Pro supporta 150V 200A, compatibile con ArduPilot e PX4. Caratteristiche DroneCAN, alimentazione duale, ventola di raffreddamento, e adatto per elicotteri, multi-copter, aerei, VTOL, modelli UGV, USV per il controllo di volo professionale.
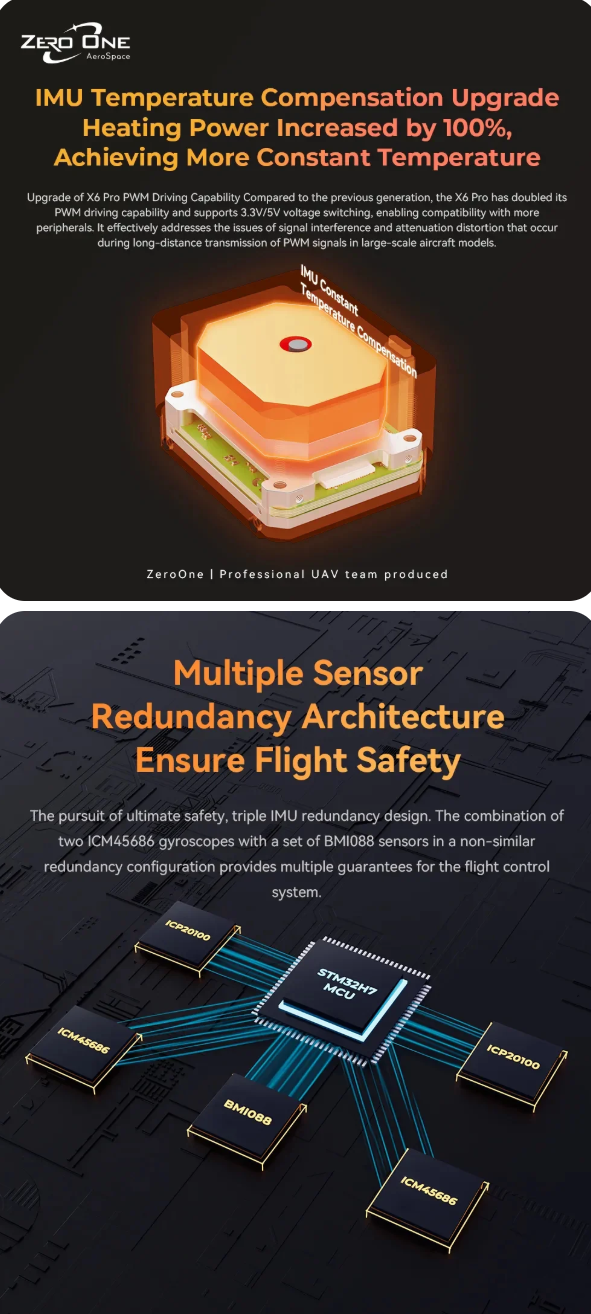
ZeroOne X6 Pro migliora la compensazione della temperatura IMU, raddoppia la potenza di riscaldamento e garantisce la sicurezza di volo tramite ridondanza tripla IMU con sensori ICM45686 e BMI088 collegati a MCU STM32H7.
ZeroOne X6 Pro presenta FMU v6X, MCU STM32, 16 canali PWM, alimentazione duale DroneCAN, monitoraggio servo a 9.9V, operatività da -20°C a 85°C, peso di 94g, e supporta ArduPilot/PX4 per elicotteri, multirotori, VTOL, UGV e USV.
Related Collections






