ジャンパー Xiake800 VTOL - 固定翼 Y3 垂直離陸 800 ミリメートル全幅 FPV 航空機ロングフライト飛行機キャリア RC モデル
ジャンパー Xiake800 VTOL - 固定翼 Y3 垂直離陸 800 ミリメートル全幅 FPV 航空機ロングフライト飛行機キャリア RC モデル
RCDrone
受取状況を読み込めませんでした
ジャンパー Xiake800 VTOL 仕様
ビデオ キャプチャ解像度: その他
タイプ: 飛行機
組み立て状態: ほぼ準備完了
遠隔距離: 5km
リモコン: はい
推奨年齢: 14+y
電源: 電気
パッケージ内容: リモコン
原産地: 中国本土
オペレーター スキル レベル: 中級
モデル番号: XIAKE800 800mm 翼幅
素材: フォーム
屋内/屋外使用: 屋外
飛行時間: 30分
機能: 自動復帰
寸法: 51cm-99cm
コントローラモード: MODE2
コントローラー バッテリー: 推奨 4 秒 1500 ~ 2200 mah 30C
制御チャネル: 12 チャネル以上
カメラ マウント タイプ: その他
ブランド名: uuustore
航空写真: いいえ
仕様:
ブランド: Jumper
モデル: XiaKe800
モデル: Y3 垂直離陸翼
翼長: 800mm
プロペラ: 6238
モーター: 2205.5
電気的調整: 30A
フライト制御: PIX に基づく
BEC: デュアル電圧出力
受信機: ELRS3。0
FPV インターフェース: HD/アナログ
GPS: ワンクリックリターン
ステアリングギア: 全金属歯
バッテリー: 推奨 4 秒 1500-2200mah 30C
耐久時間: 30 分
離陸重量: 650-1000g
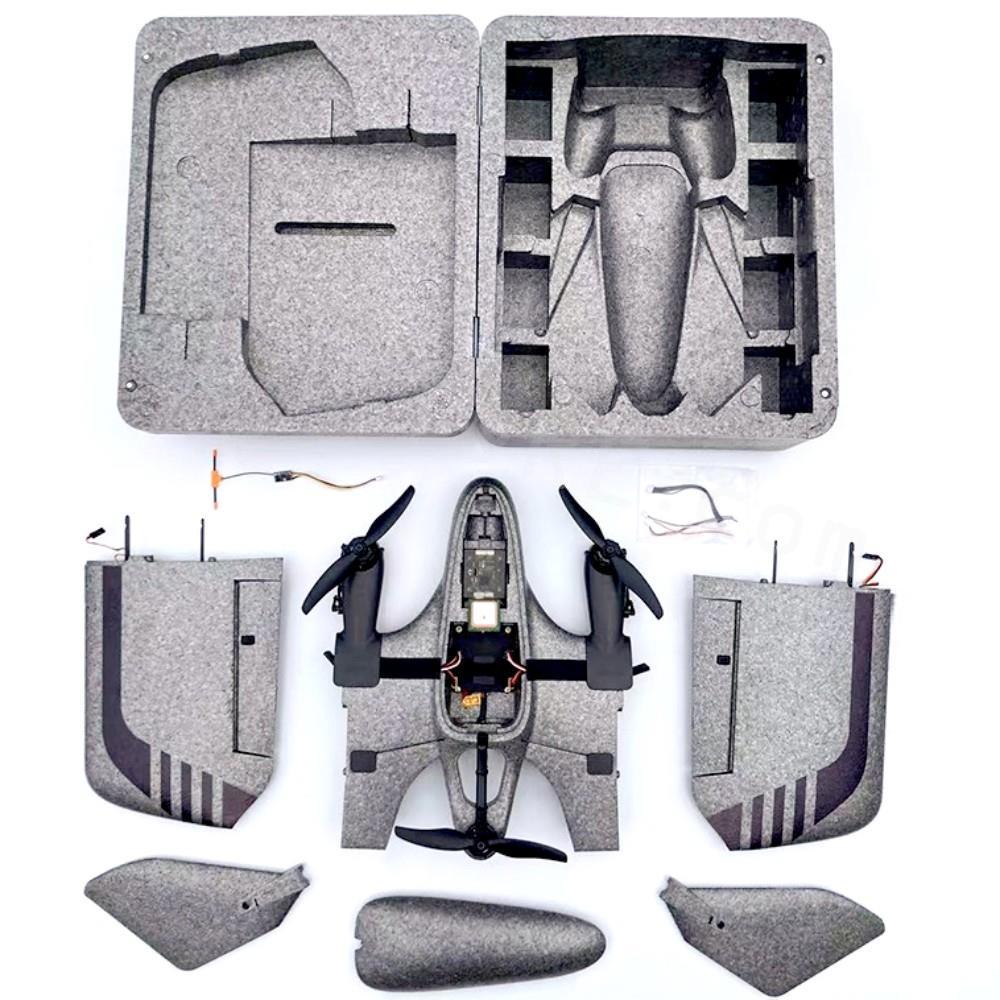
PNP パッケージが含まれています:
(本体 EPP+プラスチック部品、飛行制御、電気エンジン、電気レギュレーター、ステアリングギア、GPS モジュール ブロック、プロペラ)
プロモーション期間: 追加ELRS または D16 CRSF インターフェイスおよび梱包箱
PNP 構成 * 1、
T-PRO-ELRS -SEリモコン*1、
注: Tattu 4s 2200 45c バッテリー、ただしパッケージには含まれません
XIAKE800 UAV 飛行に関する注意事項
飛行制御の工場出荷時設定
パターン:
1.垂直自己安定化モード: 姿勢安定化のみ。スロットル、リフティング、ローリング、ヘディングはすべて手動で制御されます
2.自己安定飛行モード A: 姿勢安定のみ。スロットル、リフティング、ローリングはすべて手動で制御されます
3.クルーズモード: アクセルレバー中間位置、高度およびコース維持;
4.帰還モード: 固定翼帰還、高度 100 メートル、着陸せずに離陸点上でホバリングに戻ります
飛行パラメータ プロンプト:
1.最低高度警告: デフォルトは 20m です。航空機の高度が 20m 未満の場合、「高度が低すぎます」というメッセージがブロードキャストされます
2.バッテリー電力ブロードキャスト: 航空機搭載バッテリーの電力のパーセンテージをリアルタイムでブロードキャストします
3.モード切り替えブロードキャスト: モードを切り替えるときに、現在のフライト モードを要求します
4。 GPS ロックのアナウンス: GPS がロックされている場合、「GPS 3D ロックです」とアナウンスされます。
飛行プロセスの注意事項:
1. 「垂直自動安定モード」離陸: アクセルを急激に踏まず、機体を水平姿勢に調整します。リアルタイム。
2. 「垂直自動安定化モード」から「自動安定化モード飛行モード A」への変換: 最初の飛行では、変換高さが 30 メートル以上、スロットル レバーの中間位置、スイッチ、およびフライトコントロールは変換を自動的に制御し、このプロセス中にスティックを叩くことは禁止されています。航空機の変換プロセス中に、モーターの速度が大幅に増加します (音を聞いてください)。変換後、リモコンはモーター速度の制御を再開します(このとき、アクセルの中間位置に応じて音が大きく下がります)。尾部モーターの回転が停止し、機首がコックアップし、機体は水平飛行状態に戻ります。変換が完了しました (このプロセスには 2 ~ 3 秒かかります)。
3. 「自己安定モード フライト モード A」から「巡航モード」に切り替える: 高度を調整し、機首方位後に「巡航モード」に切り替えると、航空機は高度および方位保持状態 (アクセル 50%) に入ります
4. 「帰還モード」:機体高度を自動で100mに調整して帰還します。変更する必要がある場合は、他のモードに切り替えてください。
5.着陸のために「垂直自己安定化モード」に切り替える:着陸点より上の高度まで飛行し(高度は高すぎない)、スロットルを中央に戻し、スイッチを切り替えると、機体はすぐに「垂直自己安定化モード」に変わります。
6.着陸時の注意:ホバリング高度が高すぎると、燃料回収時や着陸時にモーター出力が低下し、機体の安定性調整能力が弱まり、風の影響が著しく大きくなります。提案: 水平飛行から垂直飛行に切り替えた後も、固定翼を使用して飛行してください (プッシュロッドにより高度が下がり、このときスロットルは低くても構いません)。高度と速度が低下するにつれて、徐々にスロットルを押し上げます (垂直飛行中に失速することは不可能であることに注意してください)。
警告: 航空機が空中にあるときはスロットルをロックしないでください (航空機のロックが解除されるたびに新しいリターン ポイントが保存されます)


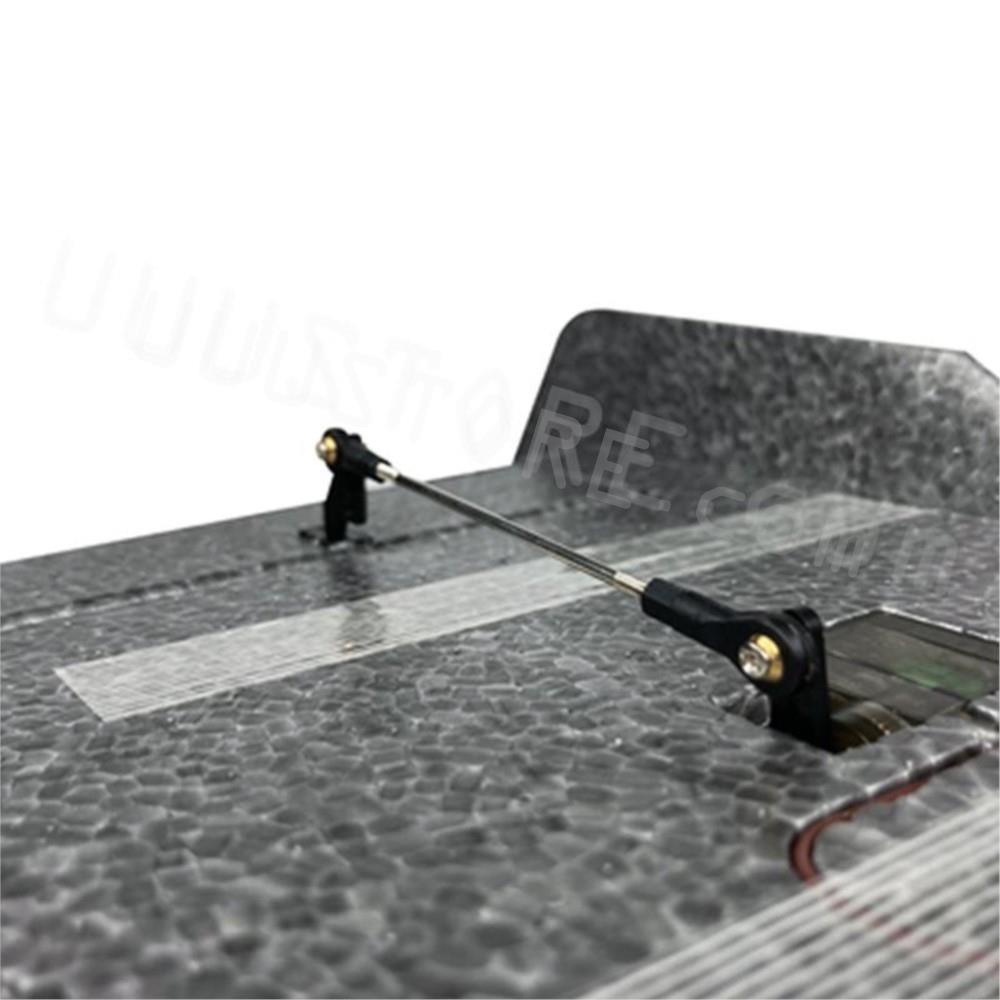
垂直離陸および着陸により、従来の固定翼航空機に伴う離着陸時の困難が解消されます。この設計は、ステアリングギアのフォースアームを可能な限り短くするために採用されたドライブモードのリフト機構を備えており、それによってダイレクトドライブステアリングによって引き起こされるジッターと自励現象を完全に排除するため、リフトオフに必要な現場要件を軽減します。ギア。
XIAKE8OO には、PIX ベースの高いフライト コントローラーと BEC が搭載されています。エンジン ルームの配線レイアウトをシンプルかつ信頼性の高い BEC 出力に、それぞれ SV (飛行制御用) と 9V (FPV 用) を出力します。

XIAKE8O には安全でコンパクトな収納ボックスがあり、バックル式の機体部品収納により輸送がより安全になります。 8 つの独立したバッテリー保管位置により、一日中飛行できます。
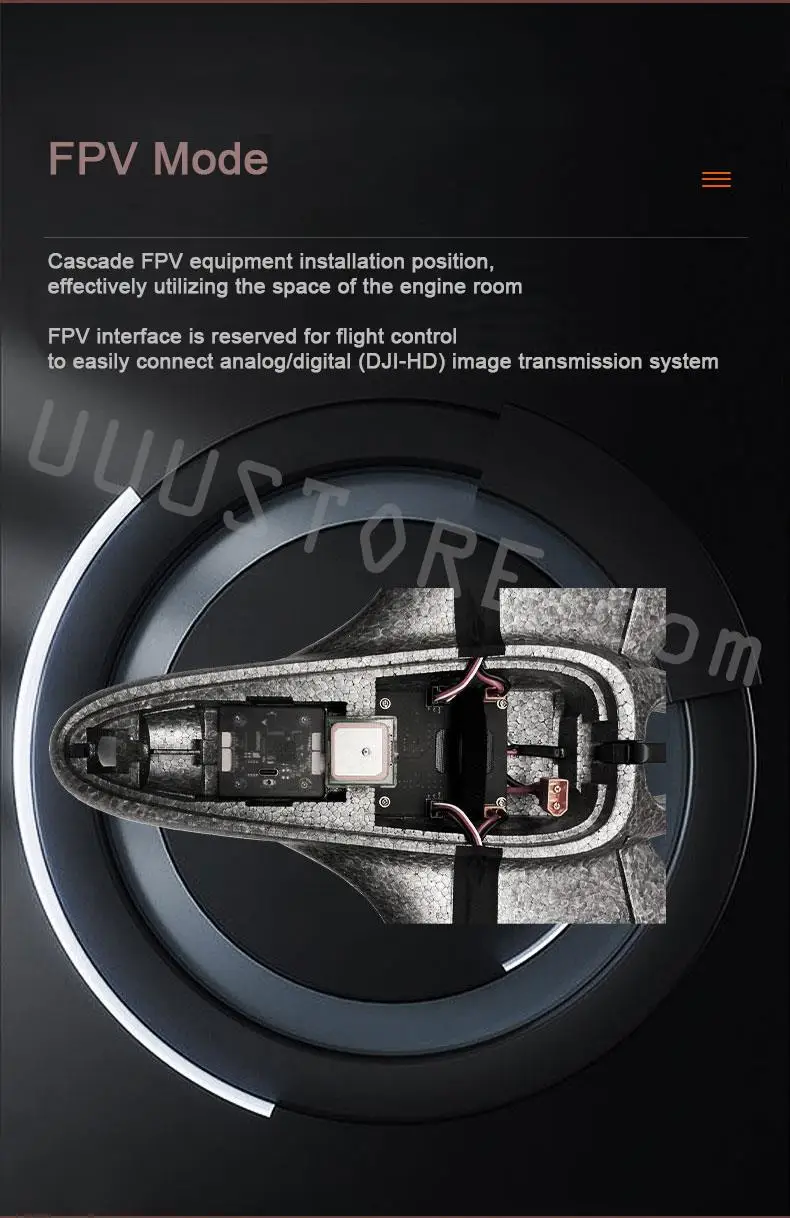
カスケード FPV インターフェイスは、フライト コントローラーに簡単に接続できるように設計されており、アナログおよびデジタル (DJI HD など) 画像送信とのシームレスな統合が可能です。

XIAKE8OO の革新的な迅速な分解構造により、持ち運びや輸送が容易になります。翼は伝統的なデュポン インターフェイスを採用しており、翼が振動しても引き続き使用できます。

XIAKE800 飛行制御配線図 (PNP および RTF バージョン、配線とデバッグには配送前に完了しています)