



Pixhawk PX4 M9N GPS 付き - PIX 2.4.8 32 ビット フライト コントローラー オートパイロット安全スイッチ ブザー付き PPM I2C RC クアッドコプター Ardupilot
Pixhawk PX4 M9N GPS 付き - PIX 2.4.8 32 ビット フライト コントローラー オートパイロット安全スイッチ ブザー付き PPM I2C RC クアッドコプター Ardupilot
RCDrone
通常価格
$206.75 USD
通常価格
セール価格
$206.75 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
Pixhawk PX4 M9N GPS仕様
ブランド名: RCドローン
懸念される化学物質:なし
電気ですか:バッテリーなし
起源:中国本土
材料:プラスチック
プラスチックタイプ:パソコン
推奨年齢: 14歳以上
RCパーツとアクセサリー:ジャイロ
サイズ: 80mm×48mm×15mm
車種別:飛行機
使用:乗り物とリモコン玩具
アップグレードパーツ/アクセサリ:フレーム
リモートコントロール周辺機器/デバイス:リモートコントローラー
ツール用品:ツール
量: 1個
技術的パラメータ: KV1100
モデル番号: M9N GPS
四輪駆動の属性:アセンブリ
ホイールベース:底板
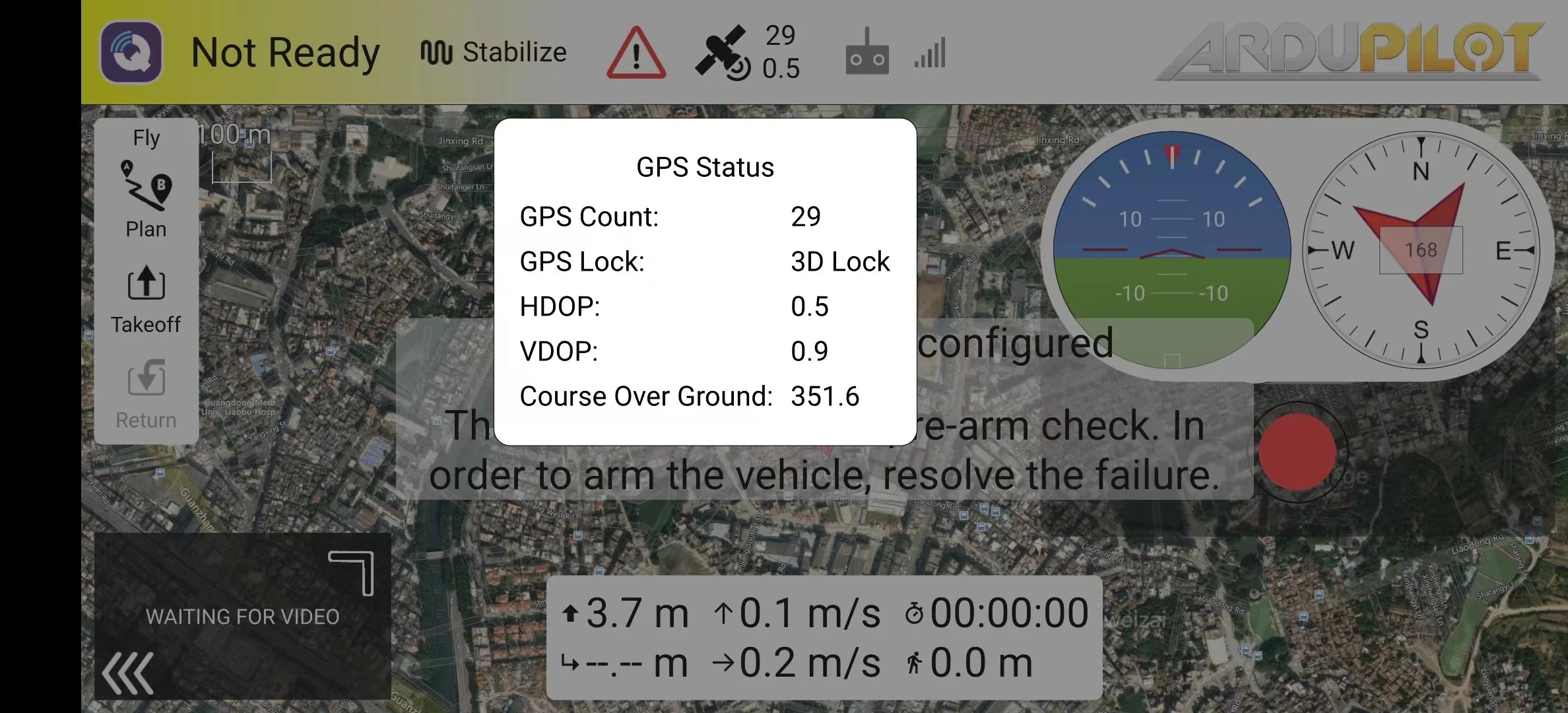




pixhawk M9N FC: メイン出力、補助出力、FMU 2.4.8、電源管理、ブザー、テレメトリ サポートなどの機能を備えたフライト コントローラー。
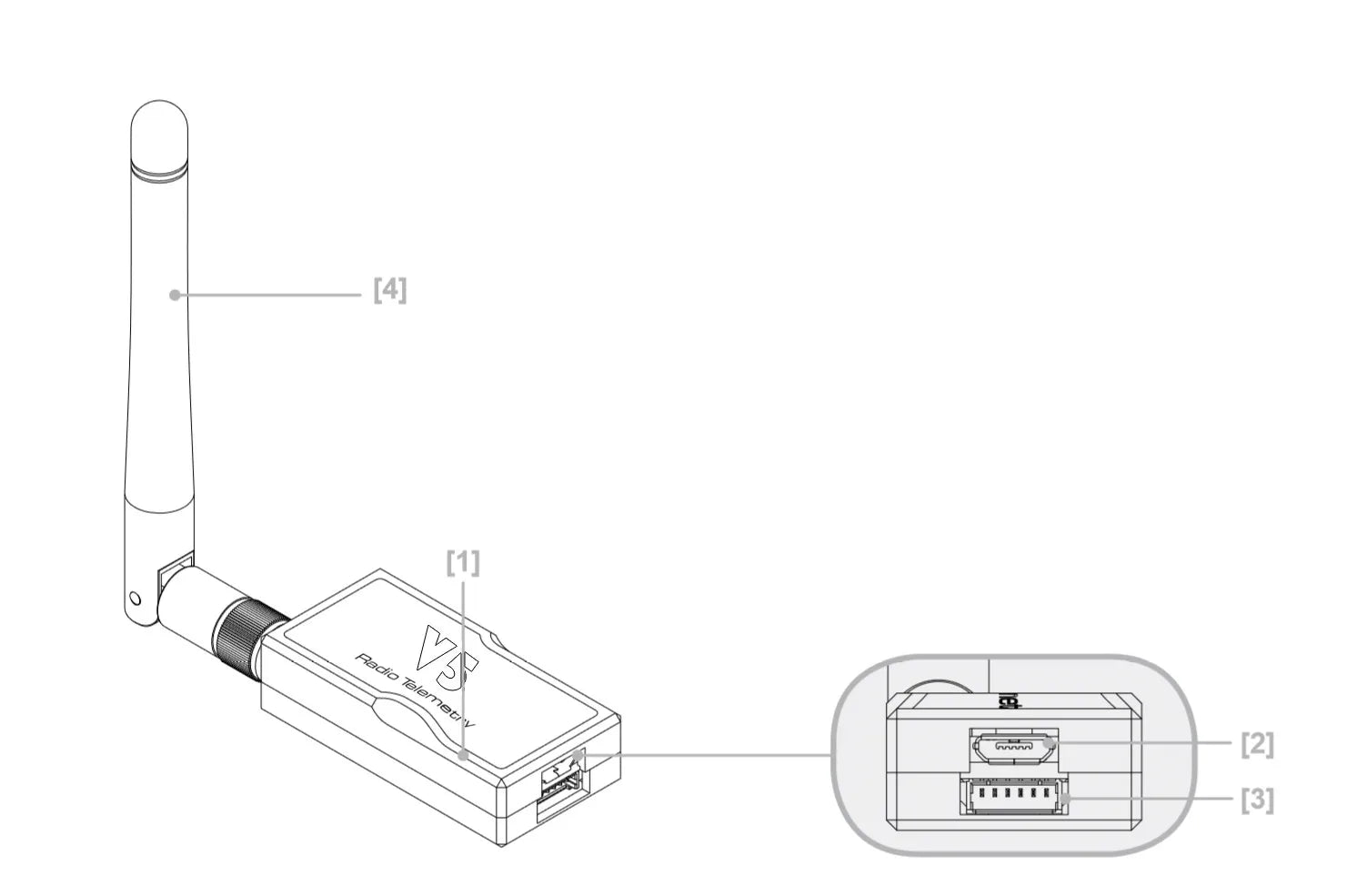
無線テレメトリは、pixhawk とコンピューターまたは携帯電話間のワイヤレス通信に使用できます。
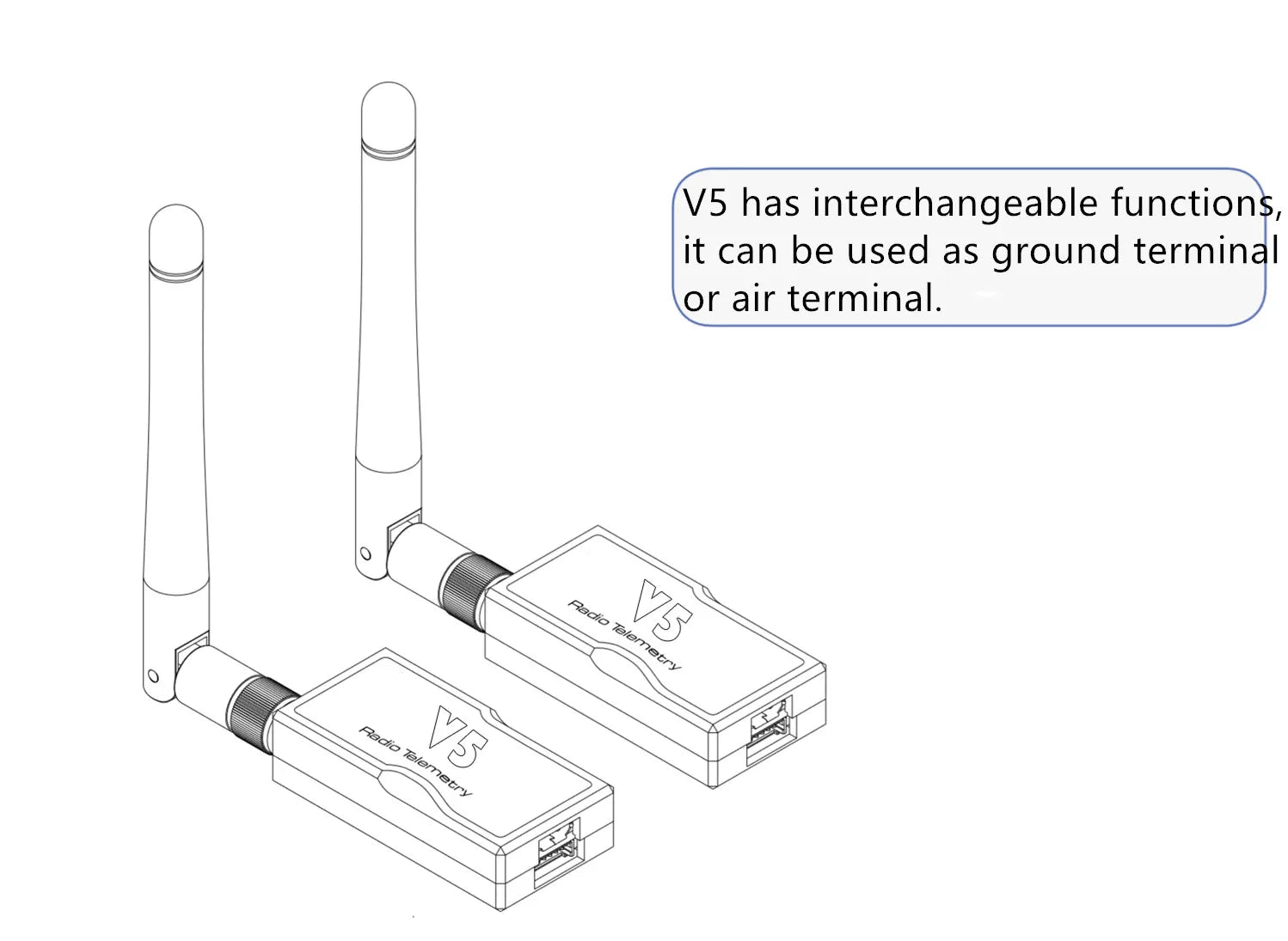
Pixhawk M9N FC は交換可能な機能を備えており、地上ターミナルと空中ターミナルの両方に適しています。
無線テレメトリ V1

WIFI V1.0およびV2.0は8ビットCPUを使用し、UDPのみをサポートします。
WIFI V3.0 は 32 ビット CPU を使用し、TCP と UDP をサポートします。
WIFI V2.0およびV3.0は外部アンテナ(5DB)を使用します

OLED モジュールはメッセージを表示できます。

ミニOSD

情報公開:
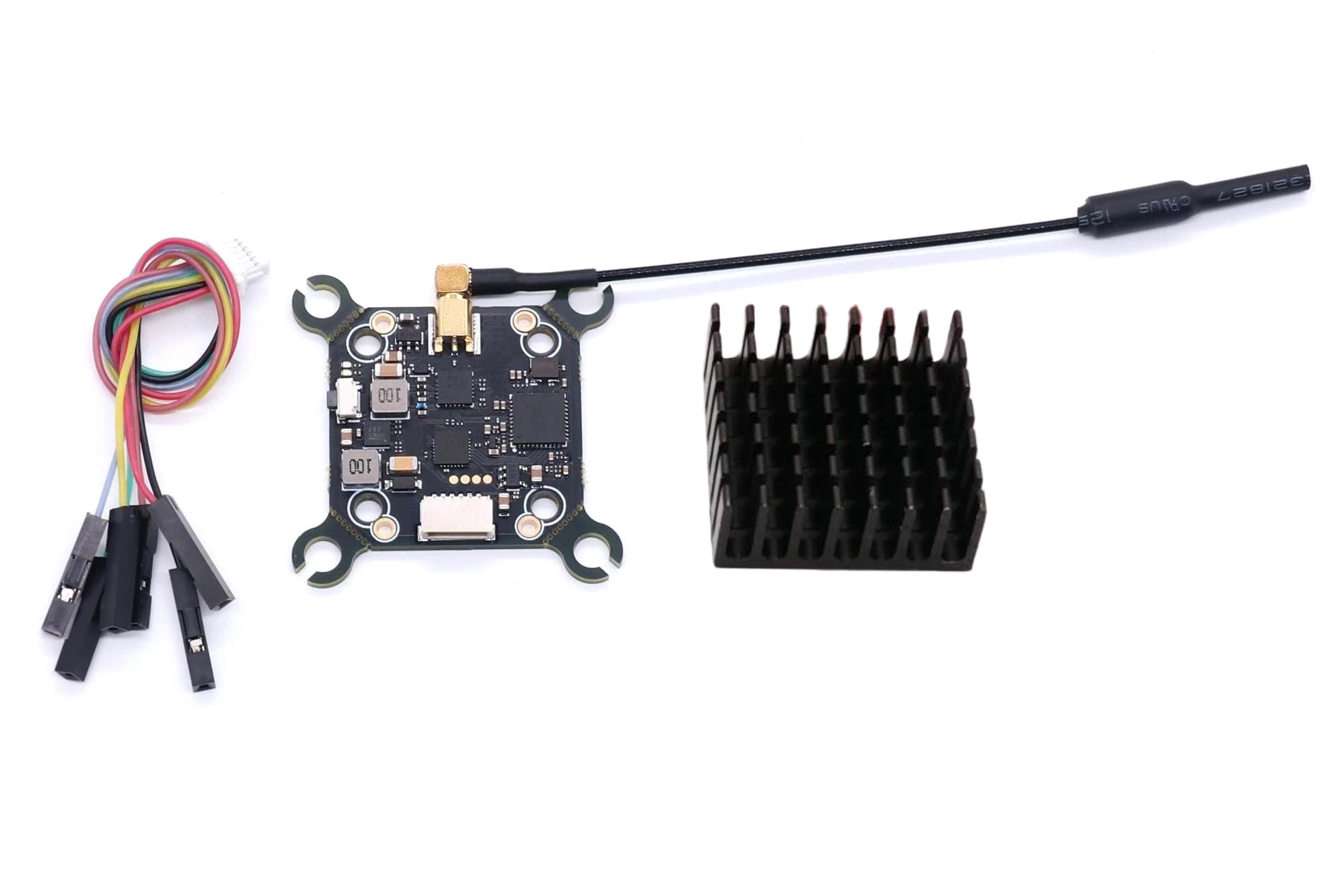
VTX1000はビデオトランスミッターで、25MW-600MW、48チャンネル(ヒートシンクと3DB付き)をサポートします。 アンテナ)
FPVカメラ

B-Cube 8 Obito VL は、Mavic クアッドコプター用に設計された高解像度カメラ モジュールで、2.1mm の広角レンズと HD 解像度により鮮明な画像を提供します。
Related Collections
























