ZED-F9P-01B-01 RTK GNSS受信ボード、USB-C、UART2 RTCM3、SMA & U.FL アンテナ、Pixhawk GH1.25-6P
ZED-F9P-01B-01 RTK GNSS受信ボード、USB-C、UART2 RTCM3、SMA & U.FL アンテナ、Pixhawk GH1.25-6P
RCDrone
通常価格
$139.00 USD
通常価格
$0.00 USD
セール価格
$139.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
このGNSS受信機ボードは、u-blox ZED-F9P-01B-01モジュールに基づいており、ロボティクス、自動操縦、ナビゲーションシステムへの統合のために、USB-C、UART/SPIピン、およびデュアルアンテナコネクタオプションを提供するRTK差分位置決定サポートを提供します。
主な特徴
- USBインターフェース: u-centerによる設定とNMEA文の迅速な表示のためのUSB Type-C接続; UARTインターフェースとは独立したシリアルCOMポートとして列挙されます。
- 電源オプション: ボード上の3.3Vレギュレーターが5V USBをモジュールに必要な3.3Vに変換します; 外部5V入力または直接3.3V供給をサポートします。
- 低ノイズ3.3V推奨: 3.3Vを直接供給する場合は、最小限のノイズでクリーンな供給が推奨されます(精密な位置決定には50mV PVPリップル未満が理想とされています)。
- UART/SPI共有: クラシックなシリアルピンが利用可能ですが、SPIピンと共有されています; デフォルトではUARTピンが有効になっています。DSELジャンパーはボードの背面でオープンにする必要があります。
- UART2でのRTCM3処理: 2番目のシリアルポート(UART2)は主にRTCM3補正データに使用されます。デフォルトでは、RTCM3を自動的に受信し解析してRTKモードを有効にします。基準局モードでは、UART2はRTCM3補正データを出力します。
- オートパイロットコネクタ: GH1.25-6P(Pixhawk JST-GH標準)は、Pixhawkオートパイロットに接続するため、またはボードに電源を供給するために使用されます。
- アンテナコネクタ: 2つのアンテナインターフェースが提供されています:SMA(外部ネジ、内部穴)およびU.FL (IPEX);どちらも使用可能です。
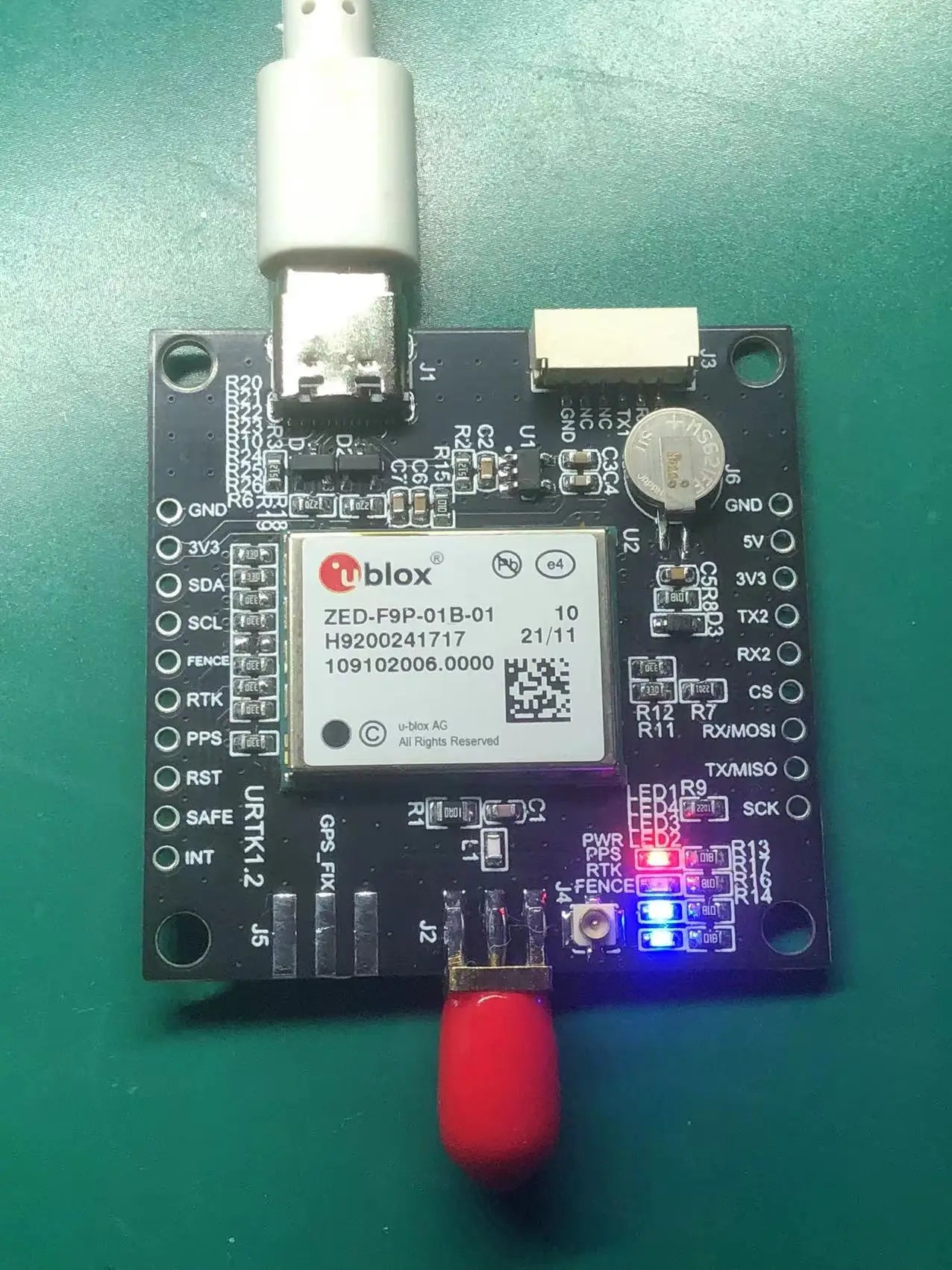
- ステータスLED: システム/RTK/ジオフェンシングの表示用に4つのステータスLED(電源、PPS、RTK、フェンス)があります。
仕様
| GNSSモジュール(モジュールラベル) | u-blox ZED-F9P-01B-01 |
| 基板マーキング(基板写真に表示) | ZED-F9P-01B-00 |
| USB | USB Type-C; シリアルCOMポートとして列挙されます(UARTとは独立) |
| シリアル / SPI | UARTピンはSPIピンと共有されています; UARTはデフォルトで有効; 背面のDSELジャンパーはオープンにする必要があります |
| UARTピン方向(SPIと共有) | TX/MISO = ZED-F9Pからの出力; RX/MOSI = ZED-F9PへのRX |
| 第二シリアルポート | UART2(主にRTCM3補正データ用; 基地局モードでRTCM3を出力可能) |
| 電源調整 | 5V USBを3.3Vに調整するためのレギュレーターが提供されています。3Vがモジュールによって必要です |
| 電源入力オプション(記載) | USB 5V、外部5V、または直接3.3V供給 |
| 3.3V供給ノイズノート(記載) | 3.3Vを直接供給する際の理想的なPVPリップルは50mV未満とされています |
| 3.3Vレギュレーター能力(記載) | 5V入力から600mA |
| USB-C電源能力(記載) | 2Aの供給が可能です |
| J3ポート | GH1.25-6P(Pixhawk JST-GH標準) |
| J3ピンアウト(Pixhawk標準) | 1: 5V_IN; 2: ZED-F9P UART1受信(3.3Vレベル); 3: ZED-F9P UART1 TX(3.3Vレベル); 4,5: 接続されていない; 6: グラウンド |
| LEDインジケーター(記載) | 電源(3.のとき赤)3VはUSBまたはQwiicバス経由でアクティブです); PPS(黄色、位置ロック後に1秒ごとに点灯); RTK(青: 電源オン後に点灯、RTCMデータ受信後に点滅、RTKフィックス後に消灯); FENCE(ジオフェンシングアプリケーション用に設定可能) |
| アンテナインターフェース | SMAおよびU.FL(IPEX);どちらのインターフェースも受け入れ可能です |
| ヘッダラベル(シルクスクリーン、左側) | GND, 3V3, SDA, SCL, FENCE, RTK, PPS, RST, SAFE, INT |
| ヘッダラベル(シルクスクリーン、右側) | GND, 5V, 3V3, TX2, RX2, CS, RX/MOSI, TX/MISO, SCK |
アプリケーション
- ドローン、UGV、ロボティクス、ナビゲーションプロトタイプのためのRTK GNSS位置決め
- Pixhawk/オートパイロットGNSS統合(JST-GH経由)
25-6P) シリアル接続 - RTCM3ベースのRTKセットアップは、補正データリンク(無線または有線)にUART2を使用します。
互換性に関する質問(UART/SPIの選択、RTCM3の配線、アンテナ、または統合)については、https://rcdrone.top/ までサポートにお問い合わせいただくか、メールで[email protected].
詳細

ZED-F9P受信機ボードは、USB-C接続と明確にラベル付けされたI/Oピン、および U.FLアンテナコネクタを組み合わせて、簡単な統合を実現しています。
USB-Cインターフェースは、ZED-F9Pをu-centerまたはRaspberry Piに独立したシリアルCOMポートとして接続し、5V USB電源からの3.3Vのオンボードレギュレーションを提供します。
ZED-F9Pボードは、共有UART/SPIピンと、RTCM3補正データに一般的に使用される第2のシリアルポート(UART2)を使用してRTKモードを有効にします。
J3 GH1.25-6P Pixhawkコネクタのピン配置には、5V_IN、UART1 RX/TX(3.3Vレベル)、およびグラウンド、ボードは電源、PPSロック、RTK/RTCMアクティビティのために4つのステータスLEDを使用しています。
ZED-F9P RTK GNSS受信機ボードは、柔軟な取り付けのために2つのアンテナインターフェースオプション—SMAと U.FL(IPEX)を提供します。
Related Collections