




NEW APM2.8 APM 2.8 Upgrade2.5 2.6 バージョン なし / 内蔵コンパス フライト コントローラ ボード 曲がったピン ケース付き DIY FPV RC ドローン用
NEW APM2.8 APM 2.8 Upgrade2.5 2.6 バージョン なし / 内蔵コンパス フライト コントローラ ボード 曲がったピン ケース付き DIY FPV RC ドローン用
RCDrone
受取状況を読み込めませんでした
仕様
用途: 車とリモコンのおもちゃ
パーツ/アクセサリーのアップグレード: アダプター
工具用品: 切断
技術パラメータ: 値 2 リモコン周辺機器/デバイス: 受信機 推奨年齢: 18+,12+y RC パーツ & Accs: コネクタ/配線 原産地: 中国本土 モデル番号: APM2。 8 素材: 金属 四輪駆動属性: 組み立て 車両タイプ: 飛行機 ブランド名: uuustore APM2。 8 APM 2. 8 いいえ / DIY FPV RC ドローン マルチコプター用ケース付きコンパス フライト コントローラー ボード ベント ピンを内蔵 注意: ---- 保護ケース付き、ショックアブソーバーなし!詳細な接続とプログラミングについては、直接私に連絡してください。 サイズ: 70*45*13。 5 機能: 
- 1* APM2。 8 ボード (コンパスありまたはコンパスなしを選択する必要があります)
- 1* APM2。 8 保護ケース
重量: 28G
APM はオープン ソースのフライト コントロールです。 プレーヤーは、モノリシック集積回路の基本的な理解、C言語、電気的、機械的知識、およびある程度の精神的能力、財政的および物質的資源、エネルギーサポートを必要とします。 準備ができていない場合は、まず導入情報を準備することをお勧めします。
はじめに:
V2 を削除します。 52 バージョン旧 1. 0mm 6P SM06B GPS インターフェース、DF13-4P コンパス外部 I2C インターフェースに変更、DF13-5P GPS インターフェースをコンパスの外部インターフェースに配置、GPS と外部コンパスの接続がより便利に。
V2 を交換しました。 バックボードのパッドを介してユーザー自身が使用できる多目的MUXインターフェースへの52個のI2Cインターフェースは、自由に構成可能な機能出力、UART0、UART2、I2C、OSDオプション、OSDインターフェースのデフォルト、2を回避します。 52 バージョンでは、データ転送と OSD の両方を使用する場合、インターフェイス プログラムを分離する Y ラインを使用する必要があります。 データ転送と組み合わせて使用すると、OSD インターフェイスが改善されました。絶縁抵抗により、データ転送の干渉をより効果的に回避できます。
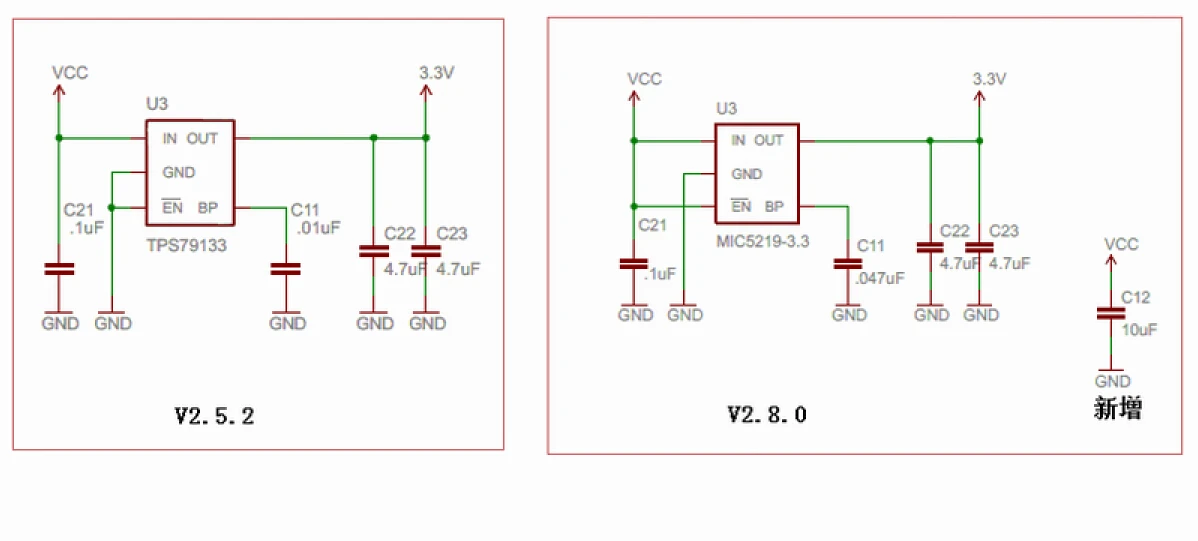
新しい V2。 8 0 米国セミLP2985-3を使用。 3、16Vまでの耐圧性、信頼性の向上、電圧の問題による不良ジャイロの健康状態の確率の減少。 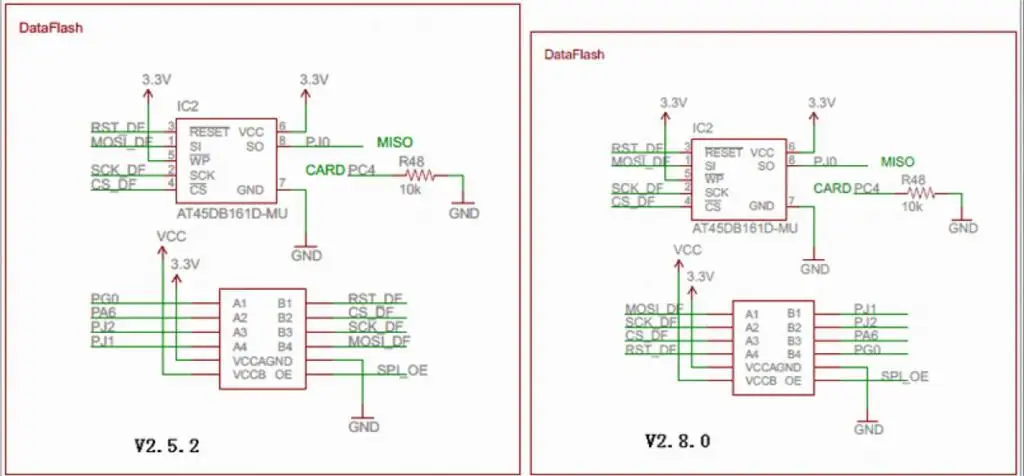
- Arduino 互換!
- コネクタを垂直に取り付けるためのトップ エントリ ピン、またはコネクタをいずれかの端に水平にスライドさせるためのサイド エントリ ピンで注文できます
- 自動データロギング用のオンボード 4 メガバイト データフラッシュ チップ
- オプションのオフボード GPS、コンパス付き uBlox LEA-6H モジュール。
- Invensense の 6 DoF 加速度計/ジャイロ MPU-6000 を使用する最初のオープン ソース自動操縦システムの 1 つ。
- Measurement Specialties の気圧センサーを MS5611-01BA03 にアップグレードしました。
- Atmel の ATMEGA2560 および ATMEGA32U-2 チップは、それぞれ処理および USB 機能に使用されます。 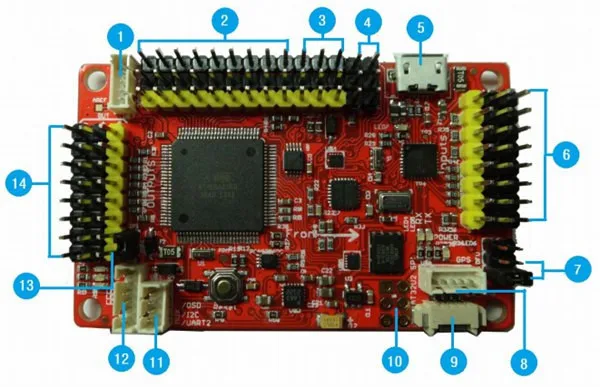
3. 自動安定性ジンバル出力
4. ATMEGA2560 SPI オンライン プログラミング ポート (オプティカル フロー センサーに有用)
5. USB ポート
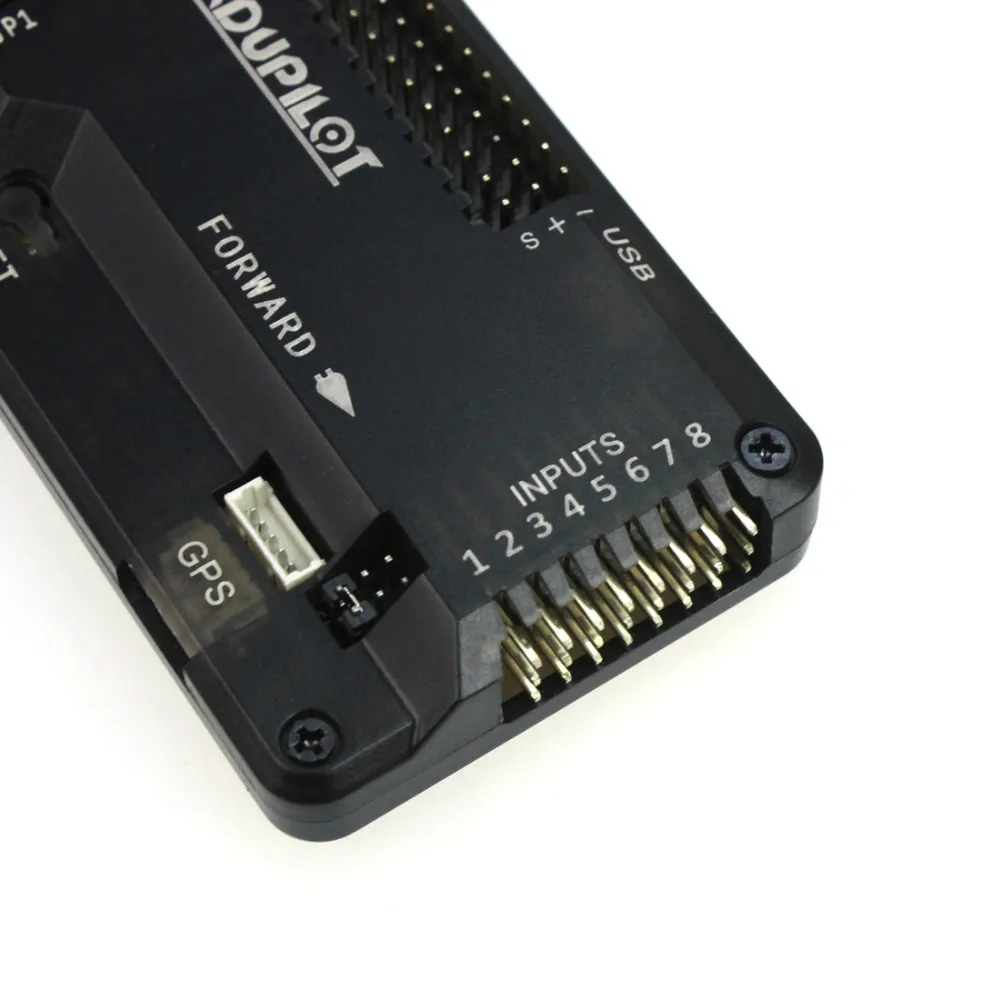
6. リモコン入力<t4><t162><t256>7. 機能選択ジャンパ
8. GPS ポート
9. 12C 外部コンパス ポート
10. ATMEGA32U2 SPI オンライン プログラミング ポート
11. 多機能設定可能 MUX ポート (OSD はデフォルトの出力です)
12. 電流電圧ポート
13. ESC電源選択ジャンパ
14. ESC出力ポート












Related Collections




