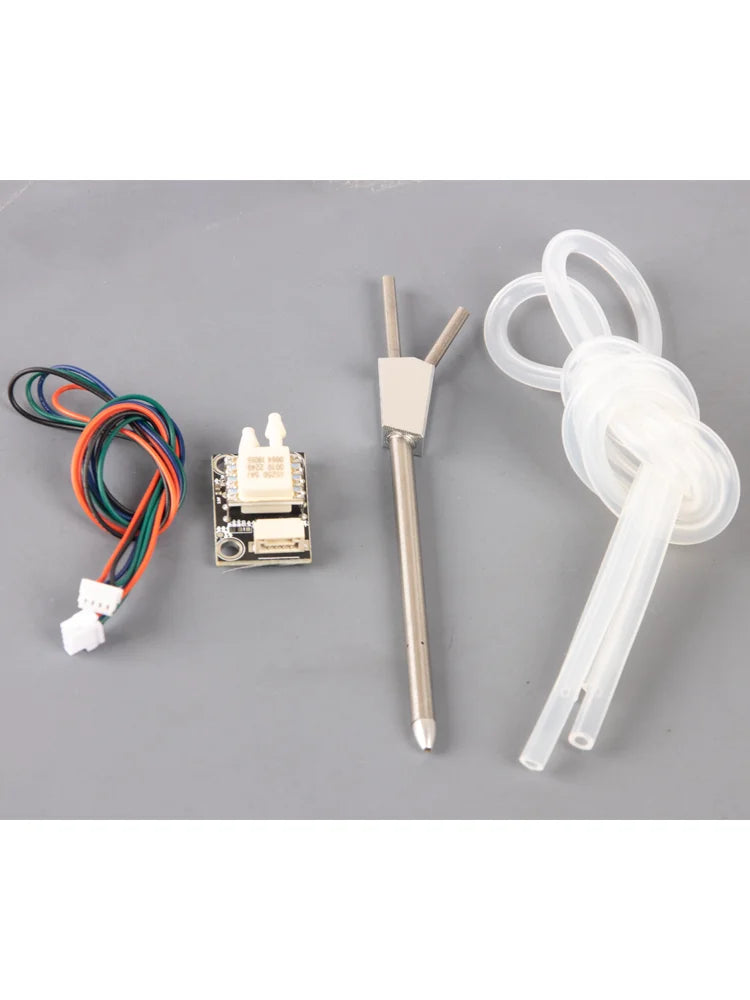
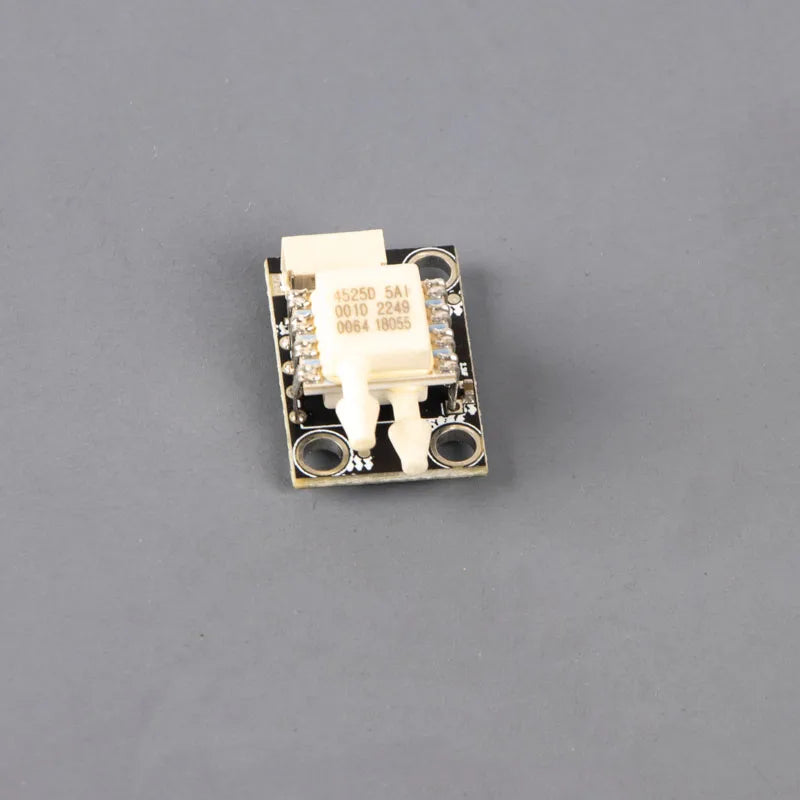
Ardupilot Arduplane Pitot デジタル対気速度計/対気速度計センサーチューブ HEX PIXHAWK2/CUAV V5 Pixhawk PX4 飛行制御用
Ardupilot Arduplane Pitot デジタル対気速度計/対気速度計センサーチューブ HEX PIXHAWK2/CUAV V5 Pixhawk PX4 飛行制御用
RCDrone
通常価格
$52.81 USD
通常価格
セール価格
$52.81 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
仕様
ブランド名: フライラウンド
起源: 中国本土
材料: 複合材料
推奨年齢: 12歳以上
RCパーツとアクセサリー: モーター部品
車種別: 飛行機
使用: 乗り物とリモコン玩具
アップグレードパーツ/アクセサリ: カーシェル
リモートコントロール周辺機器/デバイス: リモートコントローラー
ツール用品: バッテリー
技術的パラメータ: 価値2
モデル番号: クリウスパワーモジュール
四輪駆動の属性: タイヤ







Related Collections