

















SteadyWin GIM3505-8 内蔵遊星減速モーター — 四足歩行ロボット用関節モジュール、8:1ギア、24V、CAN、IP54
SteadyWin GIM3505-8 内蔵遊星減速モーター — 四足歩行ロボット用関節モジュール、8:1ギア、24V、CAN、IP54
SteadyWin
通常価格
$80.00 USD
通常価格
$90.00 USD
セール価格
$80.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
SteadyWin GIM3505-8 内蔵の惑星減速モーター四足ロボット関節モジュールは、コンパクトなロボット関節およびアクチュエータアセンブリ用に設計されています。GIM3505-8は、ブラシレスモーターとオンボードドライバーオプションを統合した8:1の惑星減速機を搭載し、四足ロボット、ロボットアーム、人型関節および類似のメカトロニクスシステムに制御された動作を提供します。
主な特徴
- バックラッシュが少なく、スムーズな動作を実現する高度な惑星ギアシステム(ギアバックラッシュ:15アークミニット)。
- 広範な電圧適応性:定格電圧24 V、動作範囲12~48 V。
- 高トルク密度と効率:トルク定数0.52 N·m/A、定格トルク0.65 N·m、ピークトルク1.27 N·m。
- コンパクトなフットプリント:Ø43 × 23.6 mm(ドライバーなし);Ø43 × 30 mm(ドライバーあり)。
- 統合された安全保護機能:過熱、過電圧、過負荷の保護(製品文献に記載された三重保護)。
- CAN通信インターフェース; 別々のエンコーダーとオプションのカスタムブレーキをサポートしています。
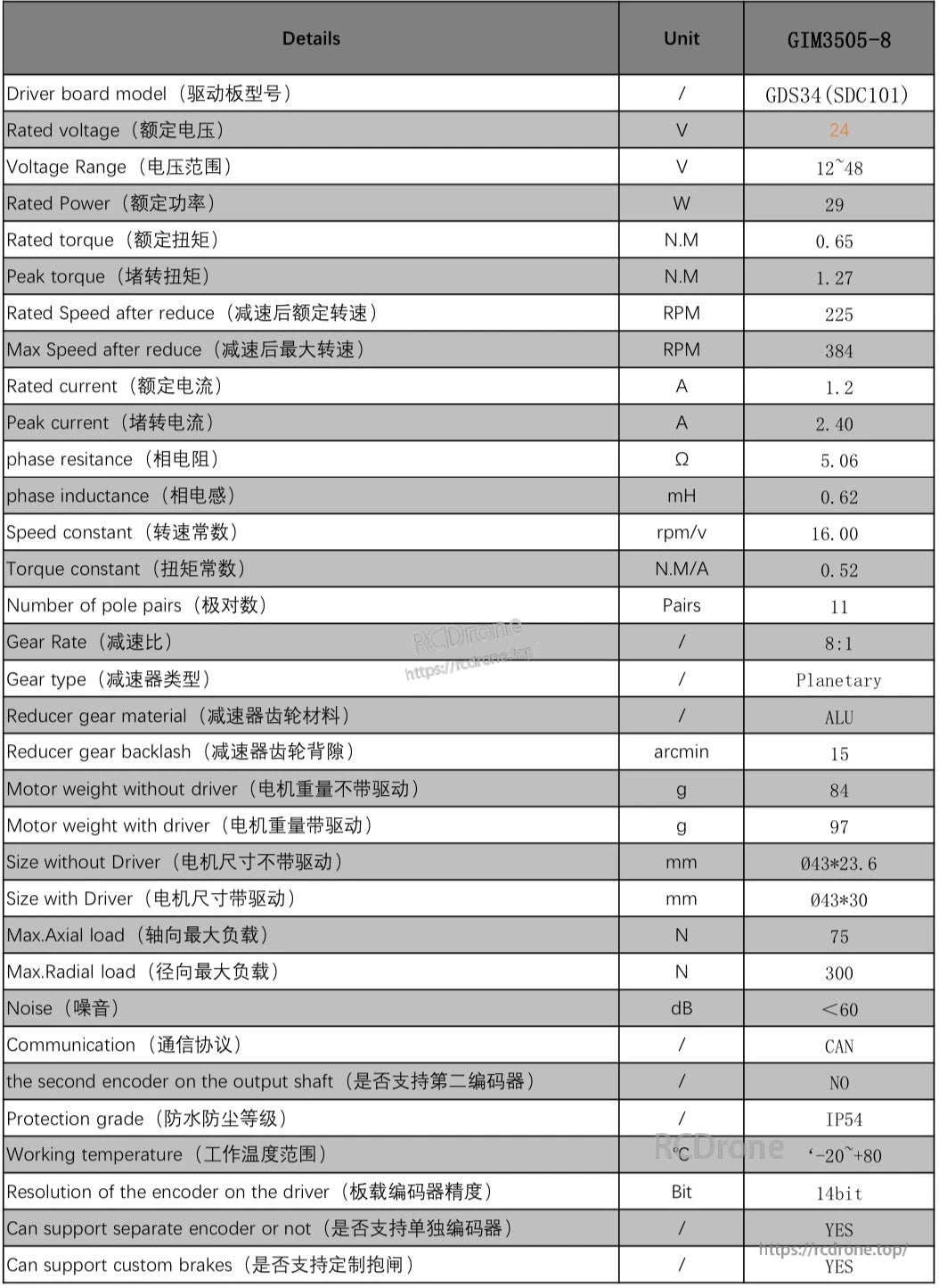
仕様
パラメータ 値 ---------------------------------------- -------------------------- モデル GIM3505-8 ドライバーボードモデル GDS34 (SDC101) 定格電圧 24 V 電圧範囲 12~48 V 定格出力 29 W 定格トルク 0.65 N·m ピークトルク(スタール) 1.27 N·m 減速後の定格速度 225 RPM 減速後の最大速度 384 RPM 定格電流 1.2 A ピーク電流(スタール) 2.4 A 相抵抗 5.06 Ω 相インダクタンス 0.62 mH 速度定数 16 rpm/V トルク定数 0.52 N·m/A 極対数 11対 ギア比 8:1 ギアタイプ プラネタリー 減速機のギア材料 ALU 減速機のギアバックラッシュ 15 arcmin モーター重量(ドライバーなし) 84 g モーター重量(ドライバーあり) 97 g サイズ(ドライバーなし) Ø43*23.6 mm サイズ(ドライバー付き) Ø43*30 mm 最大軸方向荷重 75 N 最大半径方向荷重 300 N 騒音 <60 dB 通信 CAN 出力シャフトのセカンドエンコーダ いいえ 保護等級 IP54 動作温度 -20°Cから+80°C ドライバー上のエンコーダ解像度 14 ビット 別個のエンコーダサポート はい カスタムブレーキサポート はい
アプリケーション
- 四足歩行ロボット(脚関節およびアクチュエータ)
- ヒューマノイドロボットの関節
- ロボットアームおよびマニピュレーター
- 外骨格アクチュエータ
- AGV/AMRの操舵および関節モジュール
- 自律研究および大学のロボティクスプロジェクト
カスタマーサービスおよび技術的な問い合わせは[email protected]までご連絡ください。
マニュアル
詳細


SteadyWin GIM3505-8 ジョイント仕様: 24V, 29W, 0.65N.M トルク, プラネタリーギア, CAN通信, IP54等級, カスタムブレーキと別々のエンコーダーをサポート, 動作温度 -20°C から +80°C。
Related Collections

















