




CEREBOTO OpenArm 7自由度ロボットアームキット – DIYまたは組立済み、オープンソースROS/Python制御
CEREBOTO OpenArm 7自由度ロボットアームキット – DIYまたは組立済み、オープンソースROS/Python制御
CEREBOTO
受取状況を読み込めませんでした
概要
CEREBOTO OpenArm 7DOF ロボットアームは、大学、研究所、スタートアップ、真剣なメーカー向けに設計された研究用グレードの人間サイズのロボットアームです。7自由度、633 mmのアームリーチ、典型的なペイロード4.1 kg、ピークペイロード6.0 kgを持ち、OpenArmは高精度の動作、安全な物理的相互作用、豊富なオープンソースツールを提供します。
完全なハンズオン組み立てのためのDIYハードウェアキット、または工場でキャリブレーションされた、すぐに使用できる完成品アームを選択できます。シングルアーム、デュアルアーム、クアッドアームの構成が利用可能です。
主な特徴
-
7DOF 人間サイズのロボットアーム – 自然な操作と遠隔操作のために160–165 cmの人間の腕の長さに合わせて設計されています。
-
高いペイロード &および安定性 – 典型的なペイロード4.1 kg、ピークペイロード6.0 kg、アームの重量は軽量の5.5 kgです。
-
バックドライブ可能なモーター &およびコンプライアント構造 – 人間とロボットの協働および力制御タスクのための安全でスムーズな相互作用。
-
1 kHz CAN-FD制御ループ – 高性能な研究および産業グレードのアプリケーションのためのリアルタイム、低遅延制御。
-
全金属構造 – 剛性と耐久性のための堅牢なアルミニウム合金およびステンレス鋼のメイン構造。
-
オープンソースハードウェア &およびソフトウェア – 深いカスタマイズのためのオープンCAD、PCB、ファームウェアおよび制御ソフトウェア。
-
ROS、PythonおよびC++サポート – 公式のROS統合に加え、迅速なアルゴリズム開発のためのPython/C++ API。
-
豊富なエコシステムと拡張 – 完全なロボットプラットフォームのための器用なロボットハンド、モーションキャプチャグローブおよびモバイルベースをサポート。
技術仕様
-
自由度: 7 DOF(各アーム)
-
アームのリーチ: 633 mm
-
典型的なペイロード: 4.1 kg
-
ピークペイロード: 6.0 kg(各アーム)
-
アームの重量: 約 5.5 kg per arm
-
材料: アルミ合金およびステンレス鋼の構造部品
-
制御インターフェース: CAN / CAN-FD、UART(デュアル/クアッドアームバージョンの同梱USB2CANFD-X2アダプター経由)
-
制御周波数: 最大1 kHz CAN-FDループ
-
ソフトウェアサポート: ROSフレームワーク、Python API、C++ API
-
人間工学: 身長160〜165 cmのユーザーに適したアームの長さ
ソフトウェア &およびオープンソースエコシステム
OpenArmは完全にオープンソースのロボットアームプラットフォームです。公式リソースには以下が含まれます:
-
ウェブサイト: openarm.dev
-
ドキュメント: docs.openarm.dev
-
GitHub: github.com/enactic/openarm
-
チュートリアルビデオ: スタートガイドの公式YouTube
オープンCAD、PCB、ファームウェアファイルを使用することで、メカニクス、エレクトロニクス、制御ソフトウェアを変更したり、新しいセンサーやエンドエフェクターでアームを拡張して独自の研究テーマに対応することができます。
典型的なアプリケーションシナリオ
OpenArmは、以下のための多目的で高精度な研究および教育プラットフォームとして設計されています:
-
大学のロボティクスコースおよび実験室実験
-
研究機関およびラボプロジェクト
-
強化学習および物理ベースのAI研究
-
人間とロボットの相互作用および協働ロボットの研究
-
メイカースペースおよびオープンソースハードウェアチーム
-
工学教育およびトレーニングプラットフォーム
人間のスケールのサイズと柔軟なアクチュエーションを備えたOpenArmは、操作、遠隔操作、模倣学習、支援ロボティクスなどに最適です。
製品バージョン &および構成
バージョン 1 – DIY ハードウェアキット
-
機械構造を深く理解したい、実践的なスキルを持つユーザー向け。
-
すべての機械部品、電気部品、3Dプリント部品が含まれており、マニュアルに従って自分でアームを組み立て、キャリブレーションを行います。
バージョン 2 – 完成したロボットアーム
-
プラグアンドプレイプラットフォームが必要な研究機関、ラボ、企業、教育者向け。
-
出荷前に完全に組み立て、調整、キャリブレーション済み;箱から出してすぐに使用可能。
利用可能なアーム構成(リストに応じて):
-
DIYキット – シングルアーム
-
完成アーム – シングルアーム
-
DIYキット – デュアルアーム
-
完成アーム – デュアルアーム
-
DIYキット – クアッドアーム
-
完成アーム – クアッドアーム
パッケージ内容
各OpenArmキットまたは完成システムには通常、以下が含まれます:
-
アルミ合金およびステンレス鋼の主要構造部品
-
モーター、ドライバーボード、電源およびケーブル
-
3Dプリント部品およびネジセット
デュアルアームおよびクアッドアームバージョン: 公式BOM互換のUSB2CANFD-X2デバイス(CEREBOTOは国内の正規代理店です)を使用したPCからCAN-FDへの通信。
サポートされているハードウェア拡張
OpenArmは複数のハードウェアアドオン(別売)をサポートしており、完全なロボットシステムを構築できます:
-
器用なロボットハンド – 精密な操作と把握の研究用。
-
モーションキャプチャグローブセット – 直感的な遠隔操作と模倣学習用。
-
モバイルベース – OpenArmをモバイルマニピュレータープラットフォームに変えるため。
FAQ
Q: ロボットアームはすぐに使用できますか?
A: 完成したアームバージョンは工場で完全に調整され、キャリブレーションされています—電源を入れて作業を開始するだけです。DIYハードウェアキットは、指示に従ってシステムを組み立てて設定する必要があります。
Q: OpenArmはROSや他のミドルウェアと互換性がありますか?
A: はい。OpenArmは公式にROSフレームワークをサポートしており、PythonおよびC++のAPIを介してアームを制御することもできます。
Q: この製品は誰のためのものですか?
A: 大学や研究機関の研究者、AI &およびロボティクスラボ、教育コース、エンジニアリングトレーニングセンター、そして高度なホビー愛好者のためのものです。
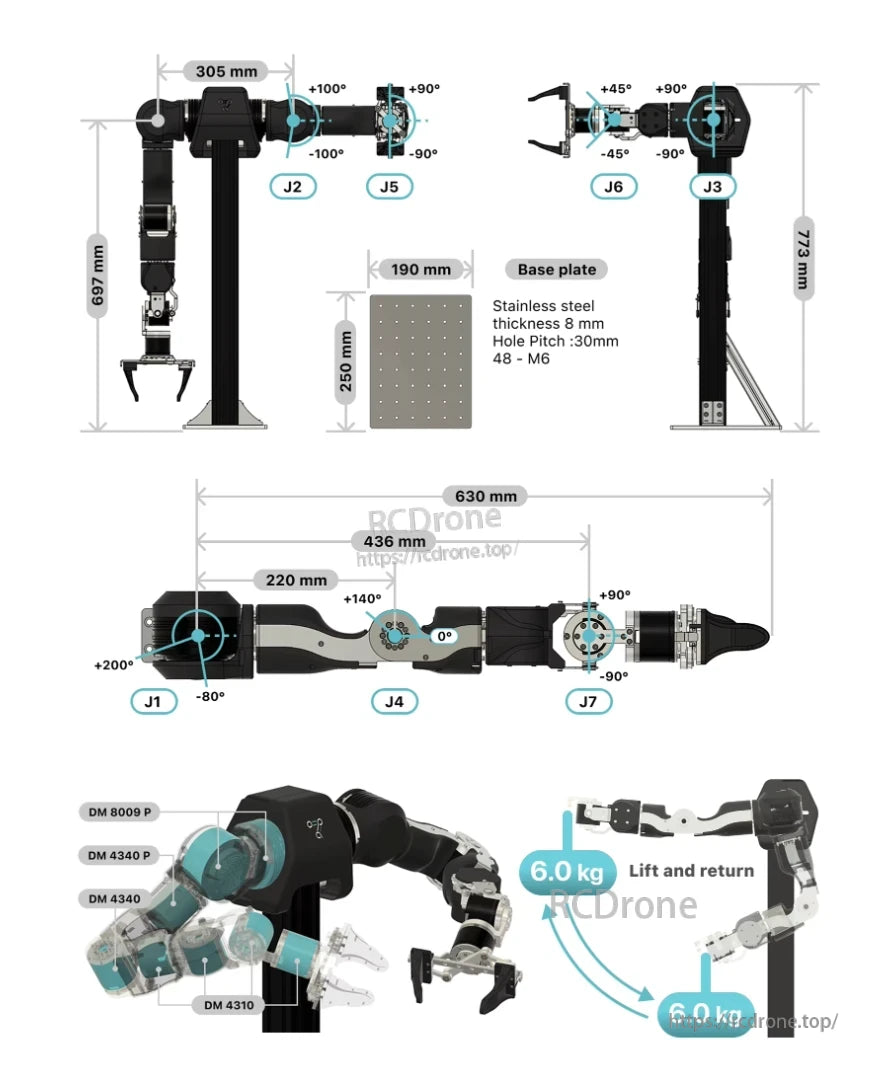
Cereboto OpenArm 7DOFロボットアームは、定義された角度範囲を持つ7つの関節(J1–J7)を備えています。高さは697 mmまたは773 mmで、リーチは630 mm、190×250 mmのステンレス鋼製ベースプレートに取り付けられています—厚さ8 mmで、30 mmピッチで48のM6穴があります。DM8009P、DM4340P、DM4340、DM4310モーターによって駆動され、6.0 kgのペイロードを精密に扱います。産業および研究用に設計されており、構造的な堅牢性と正確な動作制御のバランスを取っています。

Related Collections



