






CUAV Pixhawk V6X V2 ドローンコントローラー(PX4 ArduPilot対応、STM32H753IIK6、RM3100、100Mbpsイーサネット)
CUAV Pixhawk V6X V2 ドローンコントローラー(PX4 ArduPilot対応、STM32H753IIK6、RM3100、100Mbpsイーサネット)
CUAV
受取状況を読み込めませんでした
概要
CUAV Pixhawk V6X V2は、PX4およびArduPilot自動操縦ファームウェア用に設計されたPixhawkシリーズのドローンコントローラー です。これは、Pixhawk FMU v6x標準およびモジュラー設計哲学に従い、アップグレードされた産業用冗長センサー、一定温度の外部クロックおよびMCU熱放散設計、5V/3.3V PWMレベル切替、特許取得済みの衝撃吸収構造を特徴としています。標準PMU 2 Lite電源管理モジュールは、70V 入力および220A 電流検出をサポートしています。
主な特徴
- H7倍精度浮動小数点ユニット(STM32H753IIK6);480MHz倍精度浮動小数点ユニット;2Mフラッシュメモリ
- 産業用異種三重冗長IMUマトリックス、独立したバスと電源設計(IIM-42652、BMI088、ICM-45686)
- 組み合わせ二重冗長気圧計(BMP581、ICP-20100)
- 三軸(X、Y、Z)衝撃吸収のコア衝撃吸収システム;傾斜した四隅サポート設計;新型衝撃吸収材料
- 堅牢な磁気干渉除去のための自動車グレードRM3100磁気コンパス
- IMU外部クリスタルクロック補償(高精度定温外部クロックと併用してODR誤差を減少させ、感度と同期を改善)
- 定温制御システム:熱伝導シリコンとIMU温度補償により温度関連のドリフトを減少
- 5Vと3の間で切り替え可能な柔軟なソフトウェア3V PWM出力レベル
- ミッションコンピュータや測量カメラなどのデバイスとの高速データ同期のための統合100 Mbpsイーサネットインターフェース
- セキュアブートおよびセキュアファームウェア更新サービスをサポート
- マルチ冗長電源設計; 2チャネルCAN PMU入力をサポート; PMU 2 Liteを標準装備
- 直接ネジ取り付け用の底面取り付け穴を追加; 取り付け穴はM2標準ネジと互換性あり
仕様
| プロセッサ | STM32H753IIK6 |
| コプロセッサ | STM32F103 |
| バージョン | Pixhawk V6XV2 |
| CPU / メモリ(記載) | 480MHz倍精度浮動小数点ユニット; 2Mフラッシュメモリ |
| 加速度計 & ジャイロスコープ | IIM-42652; BMI088; ICM-45686 |
| コンパス | RM3100 |
| 気圧計 | BMP581; ICP-20100 |
| PWM I/O | 16 |
| PWMレベル | 3.3V / 5V(ソフトウェアスイッチング) |
| 電源 | 2(2つのCAN電源インターフェース) |
| GPSポート | 2(GPS1:I2Cおよび安全スイッチを備えたGPSインターフェース;GPS2:I2CおよびGPSを備えたインターフェース) |
| TELEMポート | 3 |
| CANバス | 2 |
| PPM RC | 1(PPM受信機用の専用入力) |
| SBUS/DSM/RSSI | 2(1 SBUS/DSM/Spektrum入力;1 アナログ3。3V/PWM入力) |
| SBUS出力 | 1 |
| FMUデバッグ | 1 |
| IOデバッグ | 1 |
| イーサネット | 1 (100 Mbps) |
| SPI外部1 | 1 (外部センサー拡張用SP16インターフェース) |
| ADIO | 1 (AD3.3/ADC6.6) |
| UART4 | 1 |
| USBポート | 2 (Type-C x1; USB外部接続用GHインターフェース x1) |
| TFカード | 1 |
| 電源モジュール | 標準PMU 2 Lite (5Vバージョン)、入力電圧: 12-70V |
| 動作電圧 | USB: 4.75-5.25V; PMU 2 Lite: 12-70V; 電力: 4.85-5.45V |
| 動作温度 | -20から85C |
| サイズ | 45 x 85.1 x 29.2 mm |
| 重量 | コントローラー: 97.9g; コア: 43.1g; キャリアボード(ネジを含む): 54.8g |
| 取り付けノート(図のテキスト) | M2標準ネジに対応した取り付け穴; 表示寸法: 72 mm; 22.50 mm; 24 mm |
内容物
- Pixhawk V6X V2 x1
- CAN PMU 2 Lite 5V電源モジュール x1
- PMU 2 Lite-5V ヘッダーパワーケーブル (X7+ (V6X) バージョン)、ワイヤー長: 25cm x1
- CAN/I2C 拡張ボード x1
- TFメモリーカード x1
- Type-Cケーブル、ワイヤー長: 100cm x1
- DSM RCケーブル、ワイヤー長: 30cm x1
- SBUS RCケーブル、ワイヤー長: 30cm x1
- PPM RC/SBUS OUTケーブル、ワイヤー長: 30cm x1
- イーサネットケーブル、ワイヤー長: 40cm x1
- CANケーブル、ワイヤー長: 30cm x1
- TELEMケーブル、ワイヤー長: 30cm x1
- UART 4ケーブル、ワイヤー長: 30cm x1
- UART4 -> I2Cケーブル、ワイヤー長: 30cm x1
- ADIOケーブル、ワイヤー長: 30cm x1
- デバッグケーブル、ワイヤー長: 10cm x1
- USB -> Type-Cメスコネクタ延長ケーブル、ワイヤー長: 50cm x1
- 3M両面テープ x2
アプリケーション
- ArduPilotおよびPX4と互換性あり
- マルチローター、固定翼、VTOL固定翼、無人ヘリコプター、無人車両、無人船(潜水艦)をサポート
- ミッションコンピュータや他の搭載デバイスとの高速イーサネットデータ同期をサポート
互換性の確認や設定に関する質問は、[email protected]までお問い合わせいただくか、https://rcdrone.top/. をご覧ください
ビデオ
詳細

Pixhawk V6X V2 フライトコントローラーは H7 プロセッサを使用し、トリプル冗長 IMU、デュアルバロメーター、RM3100 コンパスを衝撃吸収設計で備えています。

Pixhawk V6X V2 は STM32H753IIK6 H7 プロセッサを使用して、PX4 および ArduPilot ベースのフライトコントロールセットアップをサポートします。

Pixhawk V6X V2 は、振動とノイズを軽減するために、4つの傾斜したコーナーサポートを備えた三軸(X、Y、Z)衝撃吸収マウントを使用しています。
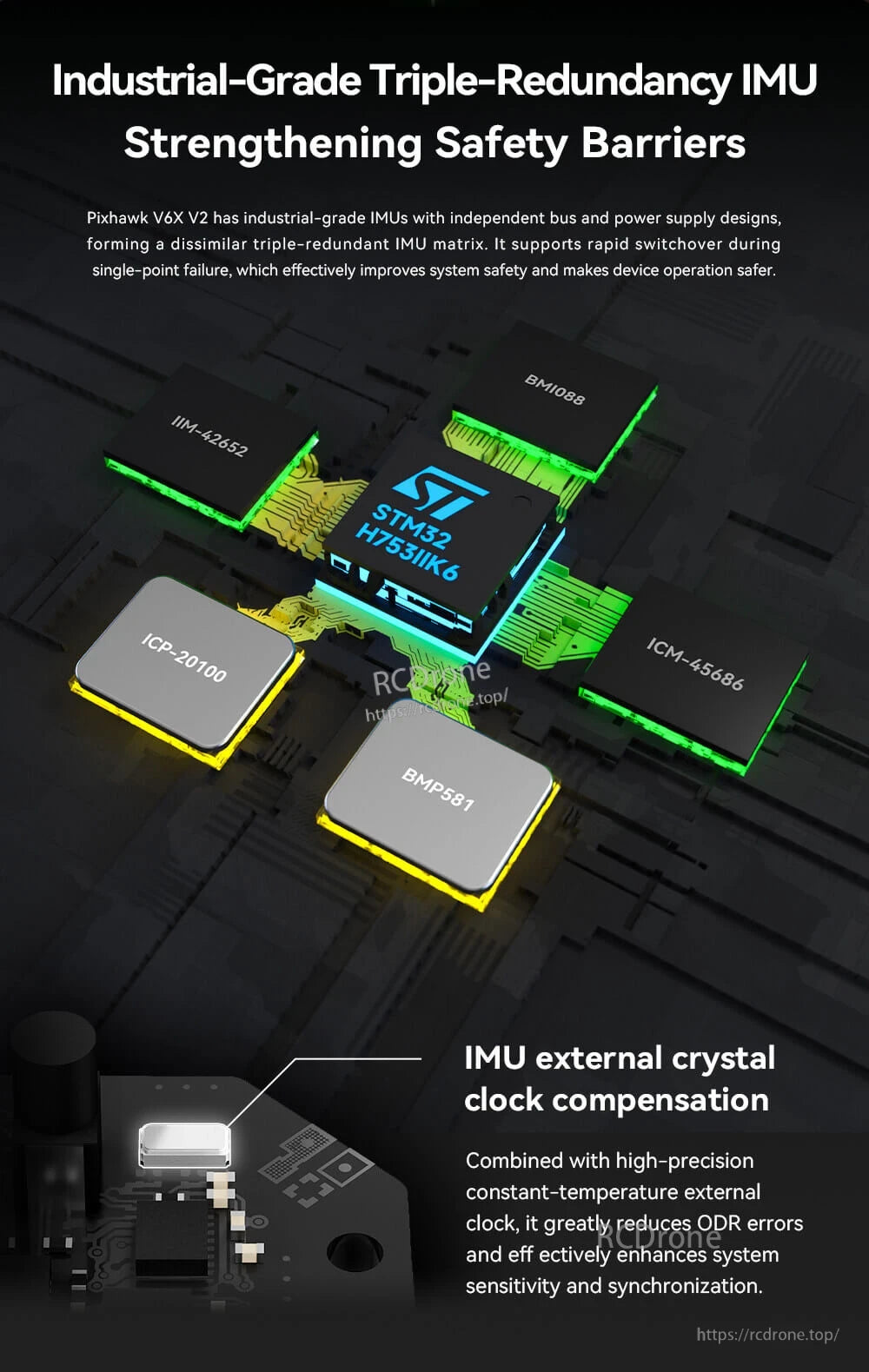
Pixhawk V6X V2 フライトコントローラーの設計は、STM32H753IIK6 の周りにトリプル冗長 IMU セットアップを特徴とし、センサーのタイミングのための外部クリスタルクロック補償を備えています。

Pixhawk V6X V2 は、自動車グレードの RM3100 磁力計を統合し、より安定した方向付けとナビゲーションのために GPS ヘッディング決定をサポートします。
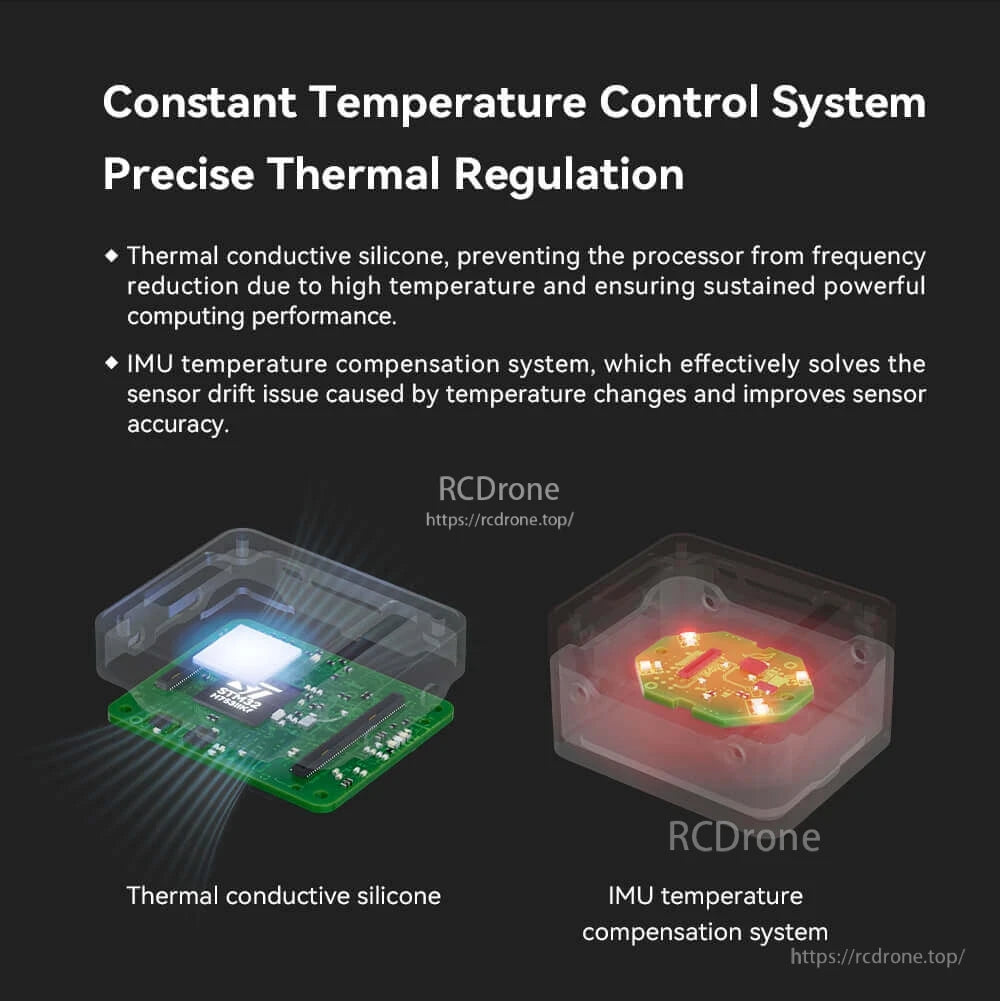
定温制御システムは、熱伝導シリコンとIMU温度補償を使用して、温度に関連するドリフトを減少させます。
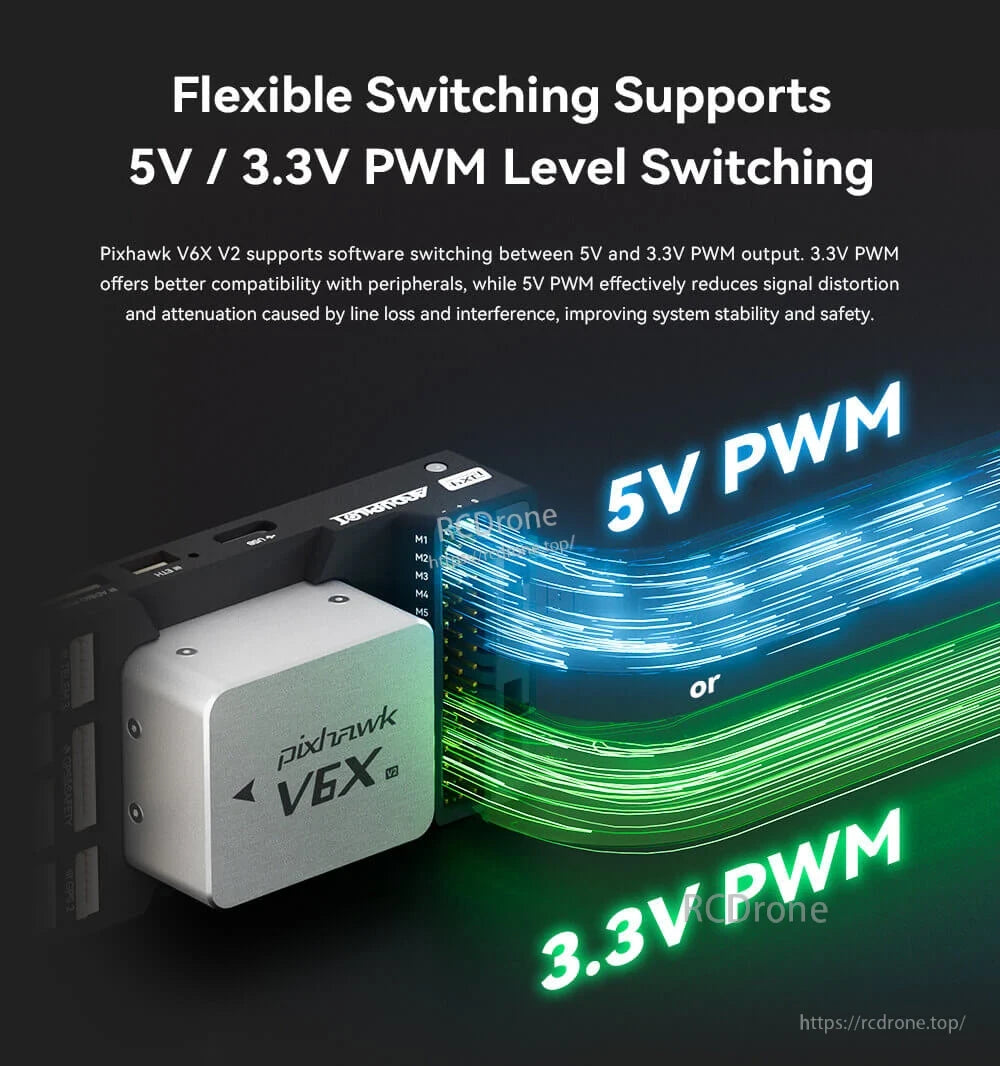
Pixhawk V6X V2は、異なる周辺機器との互換性を高めるために、5Vと3.3VのPWM出力レベル間での柔軟な切り替えをサポートします。

Pixhawk V6X V2は、USB、TELEM3、CAN、GPSなどのラベル付きポートと共に、100 Mbpsのイーサネットインターフェースを統合しています。&クリーンな配線のための安全性。
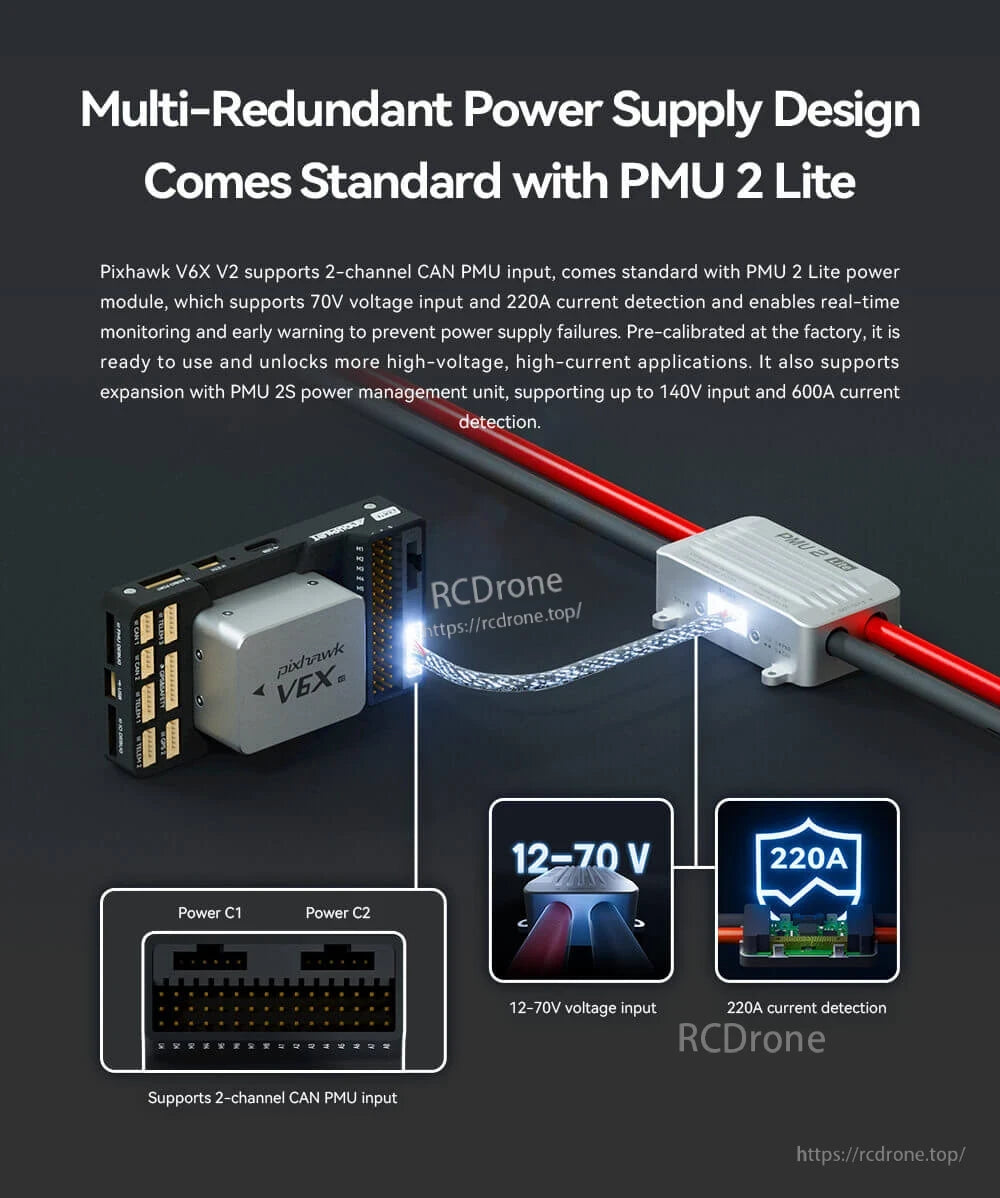
Pixhawk V6X V2は、PMU 2 Liteモジュールとペアリングして、12〜70Vおよび220Aの電流検出をサポートする多重冗長電源入力を提供します。

CUAV Pixhawk V6X V2は、カスタマイズとコネクタアクセスを簡素化するために、キャリアボード上にモジュラーで取り外し可能なコアモジュールを使用しています。
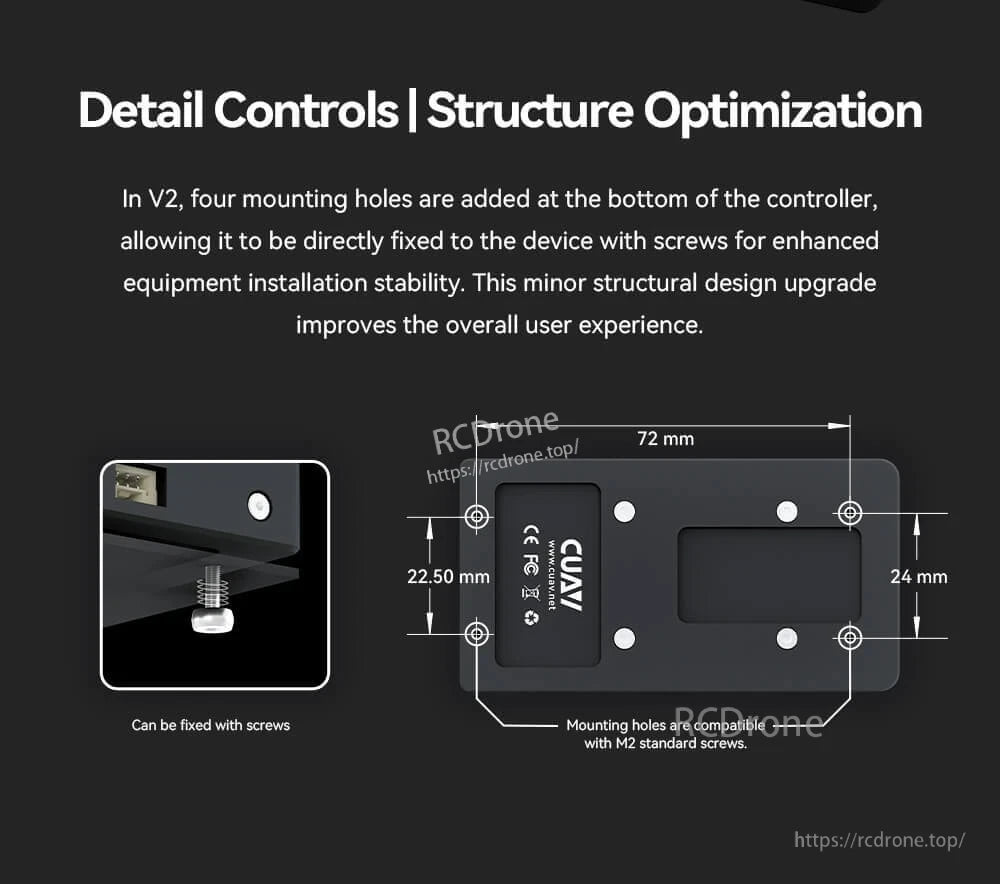
CUAV Pixhawk V6X V2は、より安全なネジ取り付けを実現するために、72 mmのフットプリントを持つ4つのM2互換の底面取り付け穴を追加しています。

Pixhawk V6X V2は、マルチローター、固定翼機、地上または海洋車両を含むさまざまな無人プラットフォーム向けにArduPilotおよびPX4ファームウェアをサポートしています。
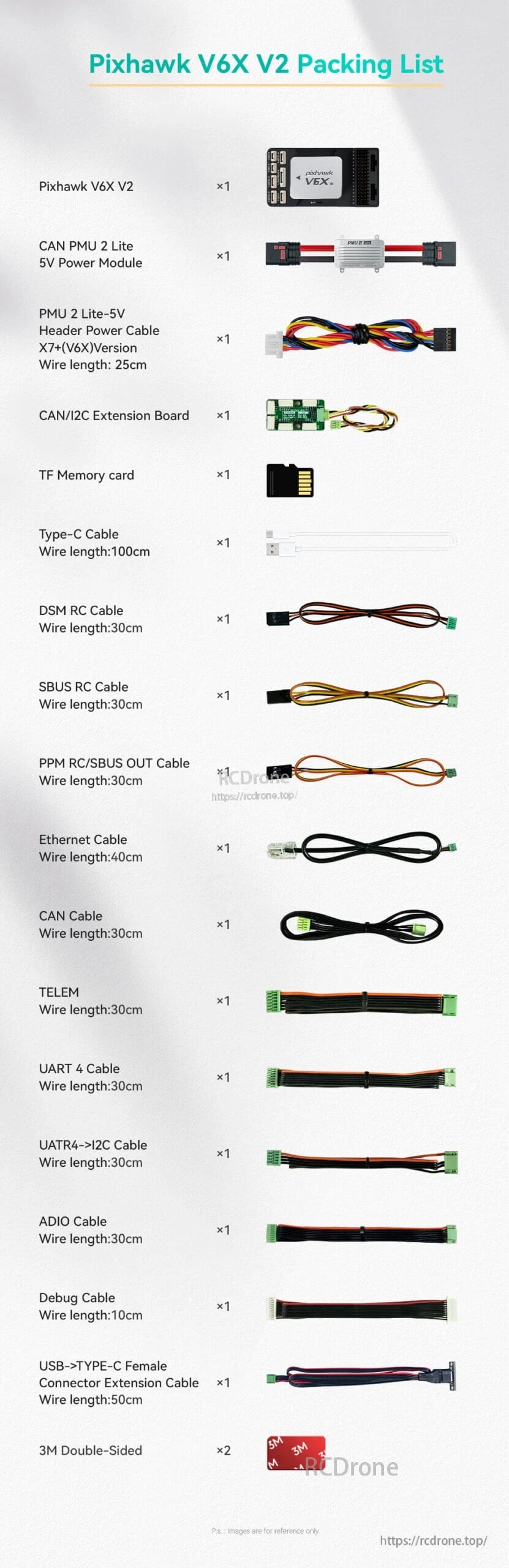
Pixhawk V6X V2キットには、フライトコントローラー、CAN PMU 2 Lite 5V電源モジュール、TFメモリーカード、Type‑C、RC、Ethernet、CAN、TELEM、UART、ADIO、およびデバッグケーブルのセットが含まれています。
Related Collections


















