





CubeMars R80 KV110 モーター 48V 3相 FOC ホールセンサー付き、外骨格 & ロボティクスドライブ
CubeMars R80 KV110 モーター 48V 3相 FOC ホールセンサー付き、外骨格 & ロボティクスドライブ
CubeMars
受取状況を読み込めませんでした
概要
CubeMars R80 KV110 モーターは、エクソスケルトンおよびロボティクス駆動アプリケーション向けの3相モーターで、統合されたホールセンサーとFOC(フィールド指向制御)をサポートしています。特別な熱放散設計と、インストールを簡素化するためのコネクタスタイルのインターフェースを備えています。
主な特徴
- 統合型ホールセンサー
- 電気角度精度偏差: ±10°
- 特別な熱放散設計(超薄型ベース & 高熱伝導シリコンパッド; 熱放散を改善するために全体の長さを短縮)
- ギアボックス取り付け用のベルのパターンホールデザイン(ハーモニックギアボックス、フランジ、またはその他のギアボックスタイプ)
- 取り付けを容易にするためのコネクターデザイン(従来の配線を置き換え)
- 提供される分析用モーター動作グラフ(48Vでの速度対トルク; 非運転/短期運転/連続運転ゾーン)
仕様
| アプリケーション | エクソスケルトン |
| 駆動方式 | FOC |
| 動作周囲温度 | -20℃~50℃ |
| 巻線タイプ | デルタ |
| 絶縁クラス | H |
| 絶縁高電圧 | 1000V 5mA/2s |
| 絶縁抵抗 | 1000V10MΩ |
| 位相 | 3 |
| 極対 | 21 |
| 定格電圧 (V) | 48 |
| 無負荷回転数 (rpm) | 4320 |
| 定格トルク (Nm) | 1.3 |
| 定格速度 (rpm) | 3580 |
| 定格電流 (ADC) | 12.3 |
| ピークトルク (Nm) | 4 |
| ピーク電流 (ADC) | 38.6 |
| Kv (rpm/V) | 90 |
| Kt (Nm/A) | 0.107 |
| Ke (V/krpm) | 10.58 |
| 相対抵抗 (mΩ) | 125 |
| 相対インダクタンス (μH) | 87 |
| 慣性 (gcm²) | 759.98 |
| Km (Nm/√W) | 0.3026 |
| 機械的時定数 (ms) | 0.83 |
| 電気的時定数 (ms) | 0.70 |
| 重量 (g) | 354 |
| 最大トルク重量比 (Nm/kg) | 11.3 |
| モーターフェーズ U V W | 参考設計図 |
| ホールセンサーポート | VCC, GND, Hu, Hv, HW (参考設計図) |
| 対応 | Hu-U; Hv-V; Hw-W |
用途
- ヒューマノイドロボット
- ロボットアーム
- エクソスケルトン
- 四足歩行ロボット
- AGV車両
- ARUロボット
マニュアル / ドキュメント
配線/ドライバー選択に関する質問やドキュメントのヘルプについては、https://rcdrone.top/を通じてサポートに連絡するか、メール [email protected].
提供されたチャートからの注意: すべてのデータは情報提供のみを目的としており、予告なしに変更されることがあります。
詳細

CubeMars R80 KV110は、コンパクトなロボティクスジョイントとエクソスケルトンドライブのために設計されており、低プロファイルのアクチュエーター-スタイルのフォームファクターを持っています。

統合されたホールセンサーは、安定したFOC制御のためのロータ位置フィードバックを提供し、電気角度の精度偏差は±10°に設定されています。

特別な熱放散設計は、超薄型のベースと高熱伝導性のシリコンパッドを使用して、コンパクトな構造内での温度管理を助けます。

ベルにパターンマウント穴があり、ハーモニックギアボックス、フランジ、または他のギアボックスタイプの取り付けを簡素化します。
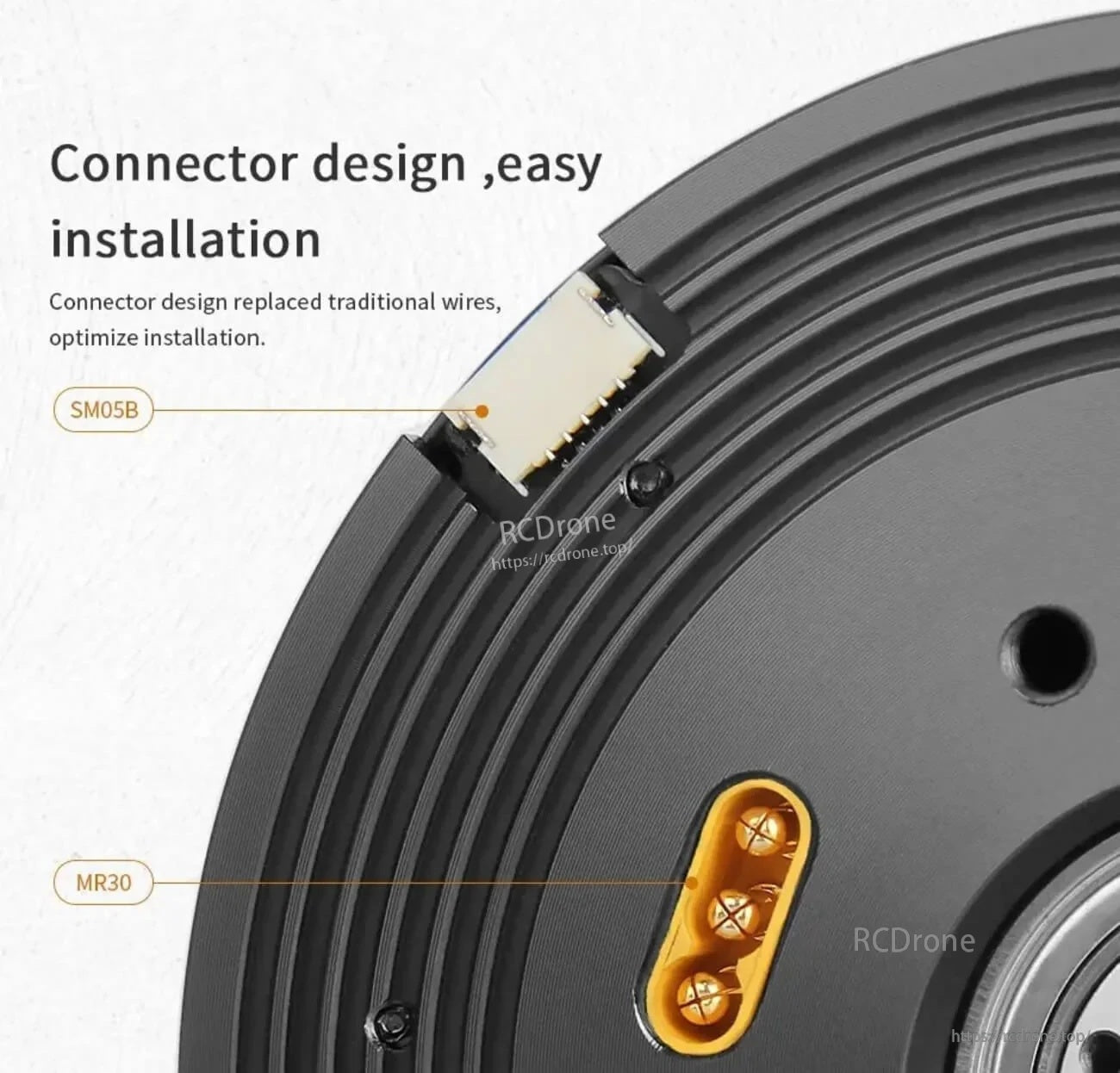
コネクタスタイルの配線は、従来のルーズリードを置き換え、電源およびセンサー接続のクリーンで迅速な取り付けを実現します。
最適化された電磁設計は、低いコギングトルクと低いローター慣性を目指し、よりスムーズなモーションコントロールを実現します。

重負荷の脚型ロボットや安定した出力が重要な高トルク関節アプリケーション向けに設計されています。

48Vの速度対トルクの動作チャートは、安全な連続範囲を選択し、短期的なピーク能力を理解するのに役立ちます。
Related Collections





