



CubeMars RI80 V2.0 KV75 フレームレスインランナー トルクモーター 1.45Nm 48V 協働ロボットアーム・外骨格用
CubeMars RI80 V2.0 KV75 フレームレスインランナー トルクモーター 1.45Nm 48V 協働ロボットアーム・外骨格用
CubeMars
受取状況を読み込めませんでした
概要
CubeMars RI80 V2.0 KV75は、高性能のフレームレスインランナーブラシレスDCトルクモーターであり、エクソスケルトン、コボットアーム、四足歩行ロボット、およびコンパクトなサイズ、高トルク密度、精密制御を要求するその他の産業用ロボットアプリケーションに最適です。広い電圧範囲(12V–48V)と柔軟な構造統合を備えたRI80 V2.0は、スムーズで静かな動作、高い動的応答、優れたトルク出力を提供し、高度なロボットジョイントや協働自動化に理想的です。
主な特徴
-
フレームレスインランナーデザイン: コンパクトで、スペースに制約のあるシステムへの統合が容易です。
-
高トルク密度: 定格トルク1.45 Nm、ピークトルク4.1 Nmまで; トルク対重量比9.3 Nm/kg。
-
超低コギングトルク: スムーズで正確な動きと低ノイズを保証します。
-
曲面永久磁石: BEMF正弦波設計により、より良い制御と性能を実現します。
-
手巻きステーター: 高い銅充填率とわずか0.5mmのクリアランスが、取り付けと熱放散を改善します。
-
温度耐性: -40°Cから85°Cまでの極端な環境で動作します。.
-
エンコーダ互換: 0.01°の制御精度を実現するために、Renishaw、SICKなどの高解像度エンコーダをサポートします。
-
RI80 高さ増加ローターオプション: 最適なホールセンサーのフィードバックのために、ローターの高さを3mm増加させます。
仕様
| パラメータ | 値 |
|---|---|
| 用途 | コボットアーム、エクソスケルトン |
| モータータイプ | フレームレスインランナーブラシレスDC |
| 駆動方式 | FOC(フィールドオリエンテッドコントロール) |
| 定格電圧 | 24V / 36V / 48V |
| KV定格 | 75 rpm/V |
| KT(トルク定数) | 0.155 Nm/A |
| 定格トルク | 1.45 Nm |
| ピークトルク | 4.1 Nm |
| 定格速度 | 1135 / 1785 / 2430 rpm |
| 無負荷速度 | 1480 / 2220 / 2960 rpm |
| 定格電流 | 9.4 A |
| ピーク電流 | 27.6 A |
| 抵抗(相間) | 330 mΩ |
| インダクタンス | 510 µH |
| 慣性 | 212.49 g·cm² |
| Km(モーター定数) | 0.2698 Nm/√W |
| 絶縁クラス | C (1000V / 5mA / 2s) |
| 動作温度 | -20°C ~ 50°C |
| 重量 | 411 g |
| 最大トルク対重量比 | 9.3 Nm/kg |
| ポールペア | 8 |
| 巻線タイプ | デルタ |
| 位相 | 3 |
配線構成
| 機能 | ワイヤーカラー |
|---|---|
| U | 赤 + 16# シリコン |
| V | 黄 + 16# シリコン |
| W | 青 + 16# シリコン |
| Hu | 黄 + 30# シリコン |
| Hv | 青 + 30# シリコン |
| Hw | 緑 + 30# シリコン |
| VCC / GND | 赤 & 黒 + 30# シリコン |
対応: Hu–U, Hv–V, Hw–W
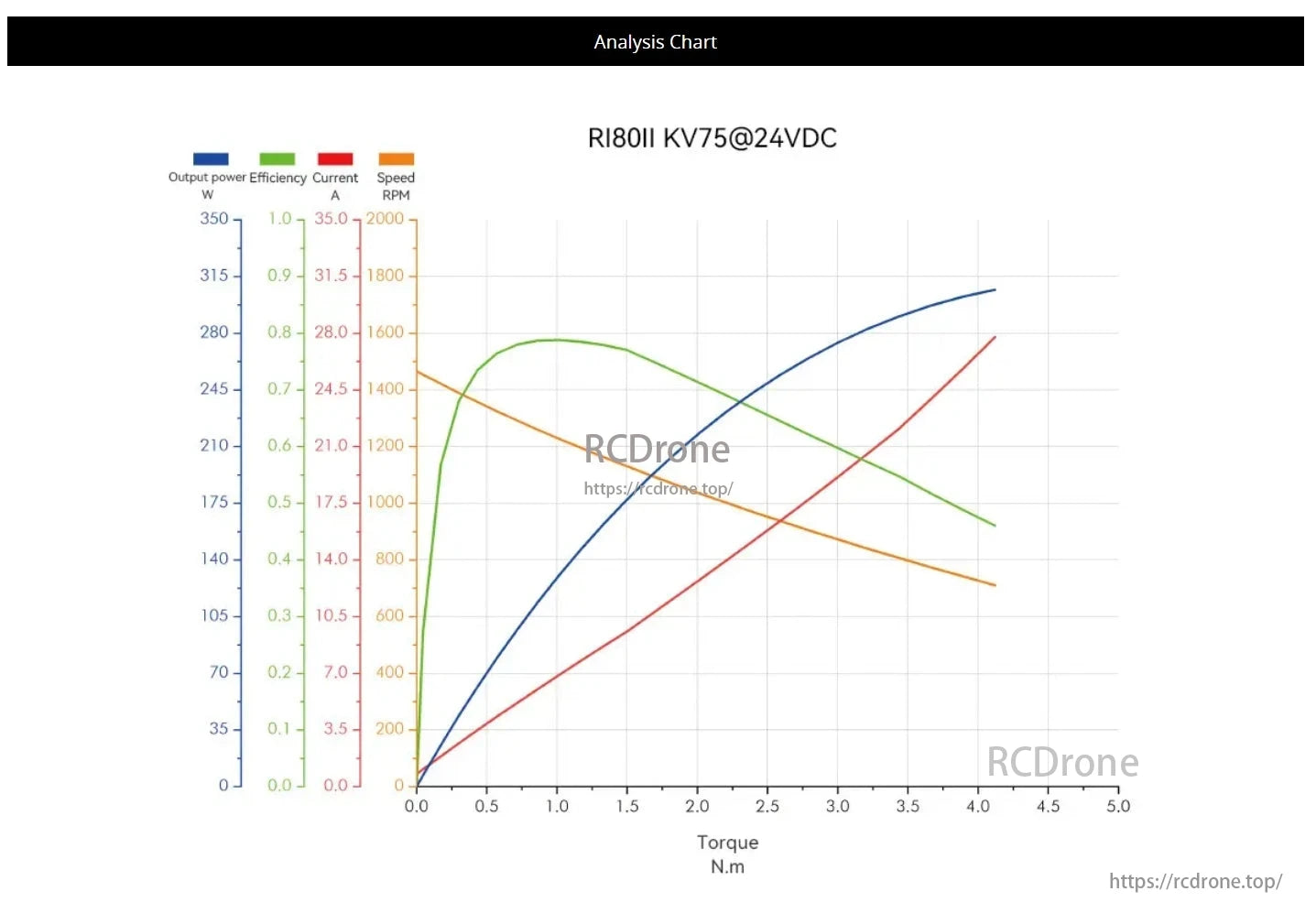
性能チャート (RI80II KV75 @ 24VDC)
-
青いライン: 出力電力 (W)
-
赤いライン: 電流 (A)
-
オレンジのライン: 速度 (RPM)
-
緑のライン: 効率
モーターは中トルク範囲(0で優れた効率を示します。5–2.0 Nm)、頻繁な動的ポジショニングを必要とするロボットジョイントに最適です。
用途
-
協働ロボット(コボット)
-
エクソスケルトン
-
二足歩行および四足歩行ロボット
-
精密ロボットアーム
-
医療ロボティクス
-
産業オートメーション
なぜCubeMars RI80 V2.0を選ぶべきか?
CubeMars RI80 V2.0は、次世代モーター設計、堅牢なトルク出力、および精密な動作制御を組み合わせて、最も要求の厳しいロボットアプリケーションに対応します。そのフレームレス構成により、システムのサイズと重量を削減しながら、シームレスな機械統合が可能です。ウェアラブルロボティクスやアジャイルコボットを設計している場合でも、RI80 V2.0は必要な性能、効率、およびカスタマイズ性を提供します。
マニュアルダウンロード
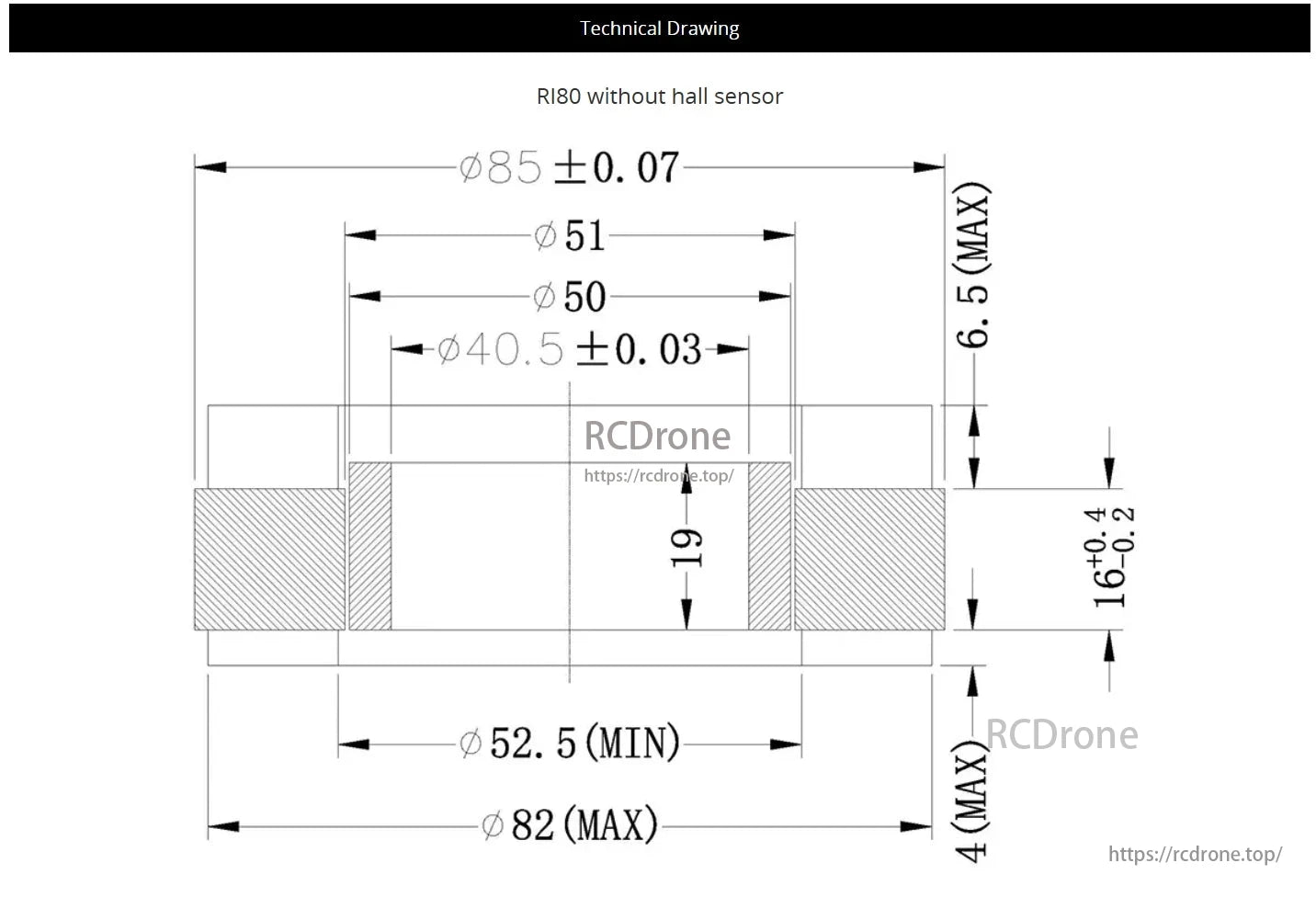
CubeMars RI80トルクモーターの寸法: Ø85±0.07, Ø51, Ø50, Ø40.5±0.03, 19, 6.5 (MAX)。
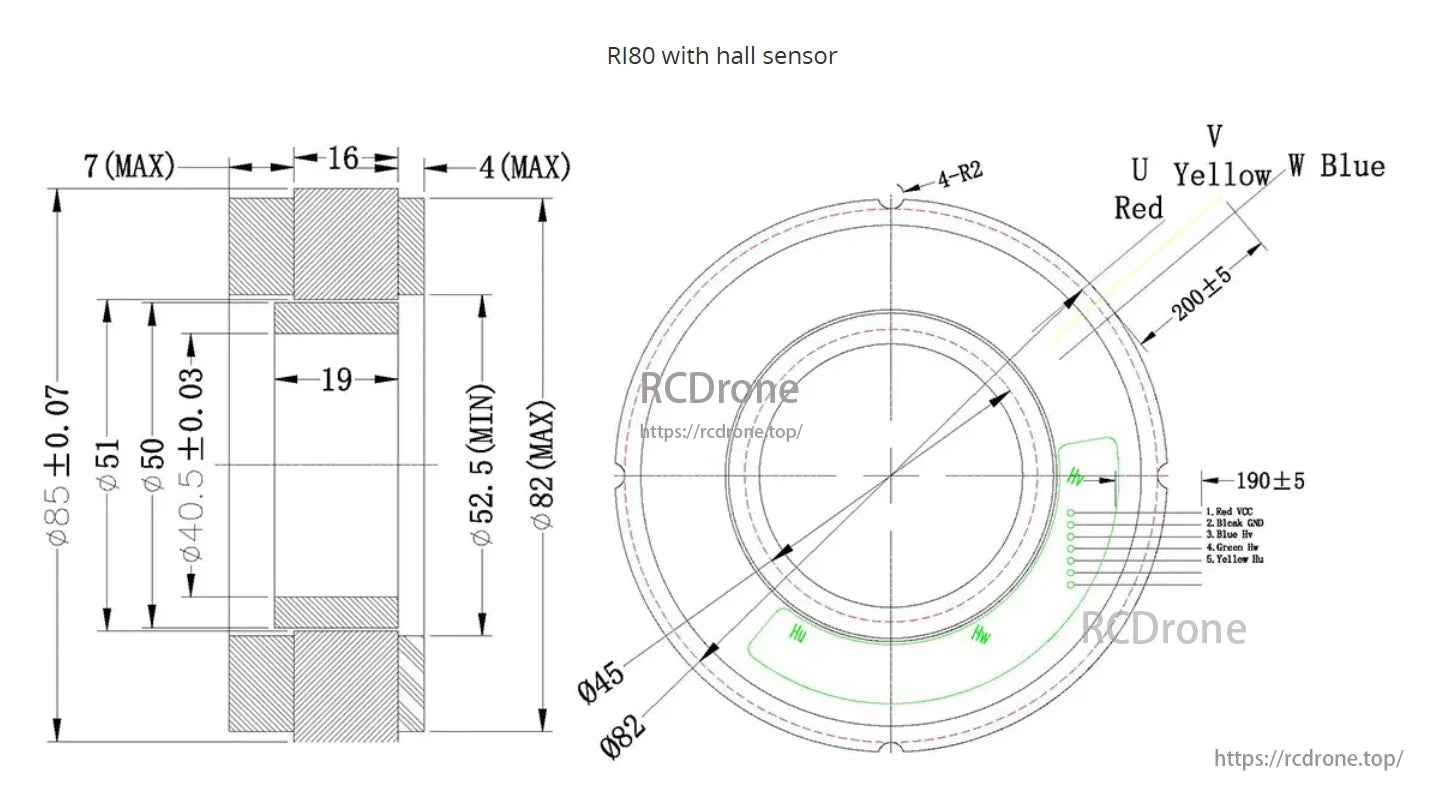
CubeMars RI80 トルクモーター(ホールセンサー付き)。寸法:直径85mm、長さ82mm。U(黄色)、V(赤)、W(青)の配線と精密な公差を特徴としています。
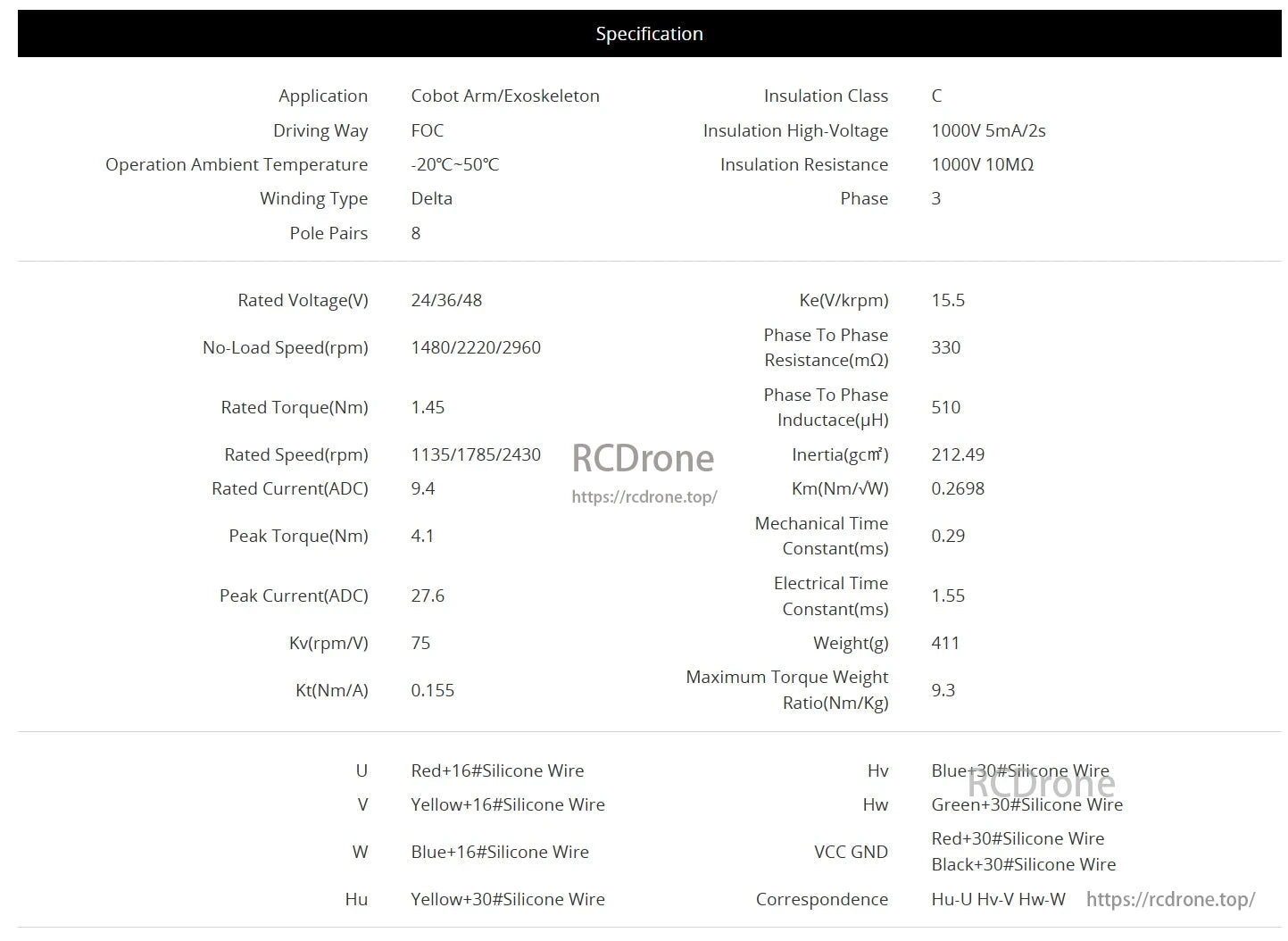
CubeMars RI80 トルクモーター:24/36/48V、1.45Nmトルク、9.4A電流、1135/1785/2430rpmの速度。絶縁クラスC、1000V高電圧、10MΩの抵抗。デルタ巻き、8極対、411gの重量。
CubeMars RI80II KV75@24VDC motor 分析チャート。トルク対出力電力、効率、電流、速度を表示します。トルクは0から5 N.mまでの範囲で、他のパラメータに対応する値があります。
詳細
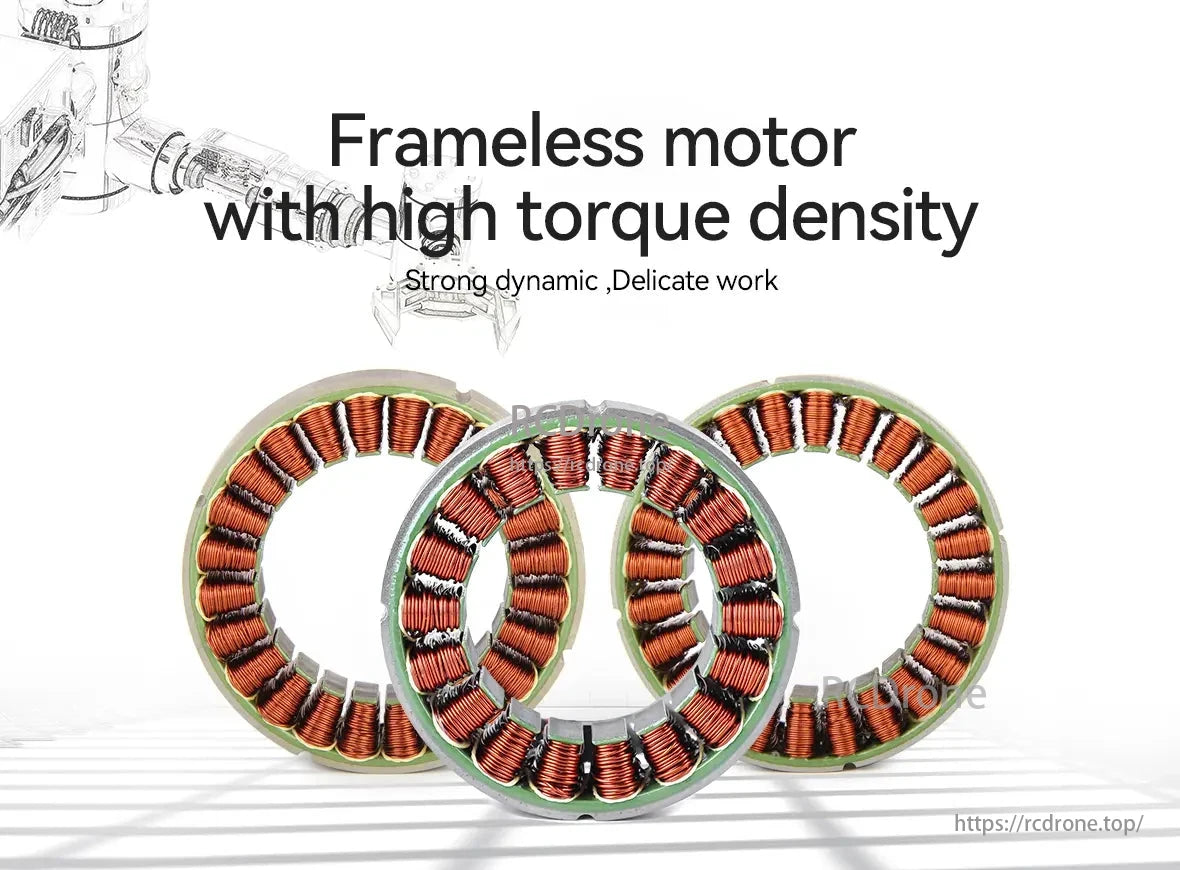
高トルク密度のフレームレスモーター。強力なダイナミクス、繊細な作業。

コギングトルクが低く、スムーズな運転、低ノイズ、強力な動的性能。

0.5mmのクリアランスを持つ手巻きステーターは、高トルクとダイナミクスを確保します。

BEMFサイナスモーター用の曲線永久磁石設計により、簡単な制御が可能です。
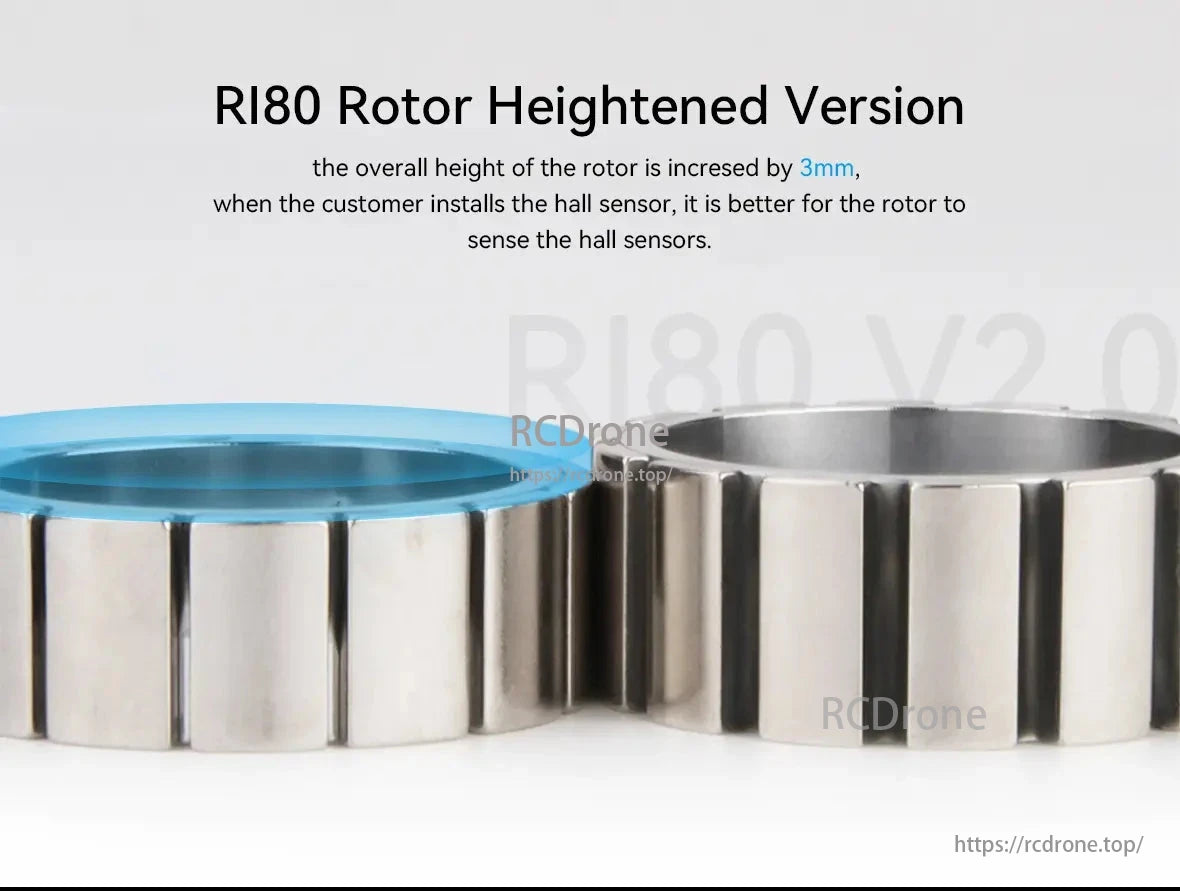
RI80ローター強化版:全高が3mm増加し、ホールセンサーの感知性能が向上しました。
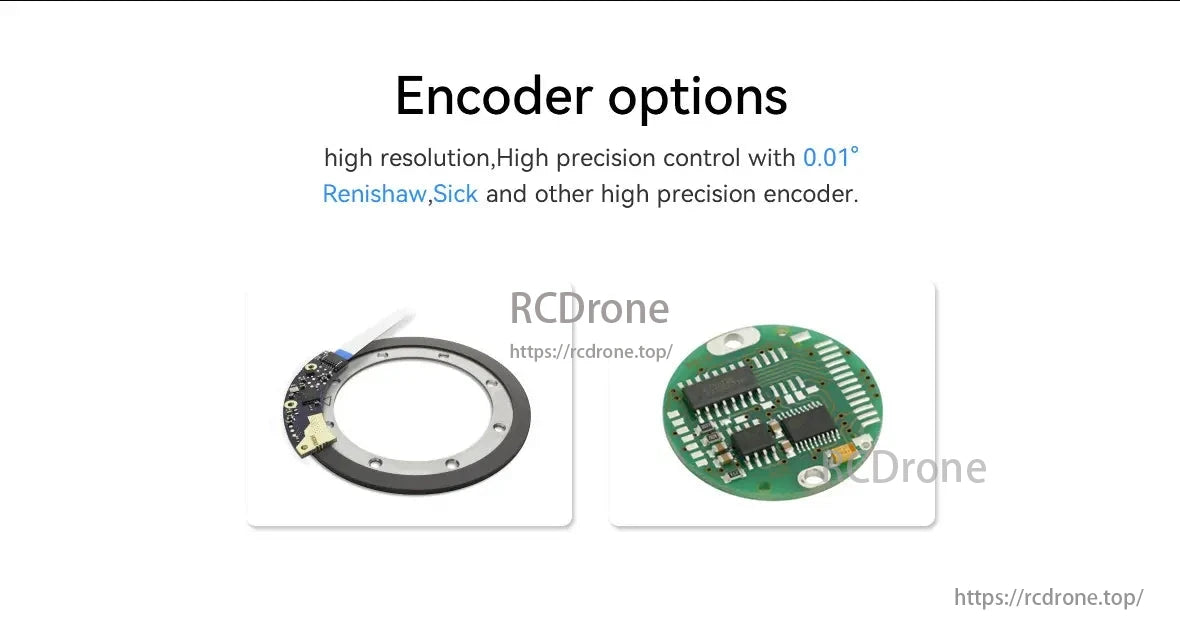
エンコーダーオプション:高解像度、高精度制御(0.01°)。Renishaw、Sick、その他の高精度エンコーダーが利用可能です。
Related Collections



